一种灵巧陆空两栖飞行器
本发明属于陆空两栖飞行器,具体涉及一种在空中可以在任意俯仰角悬停及运动,且在陆地上可以轮式行进的两栖飞行器。
背景技术:
1、现有能够实现空中飞行和陆地行进功能的飞行器主要以下几类:
2、1.无人机与车辆简单结合,在空中使用无人机的飞行功能,在地面使用车辆的行走功能,该种方案往往整机重量较大,效率较低,空中续航时间短;
3、2.通过传动装置,连接无人机旋翼电机与行走机构,实现在地面的行走,该种方案传动装置往往较为复杂,重量较大;
4、3.加装无动力轮,通过螺旋桨的推力驱动飞行器实现地面行走功能,该种方案在地面行进时驱动效率较低。
5、多旋翼无人机能够跨越湖泊、高山等地面障碍物,可以快速飞行,特别适合在近地面环境(如室内、城区和丛林等)中执行摄影、测绘、电力巡检等任务,具有广泛的应用前景。但其也有很多不足:一是常规多旋翼无人机飞行时需要时刻克服自身重量,能耗高,续航时间有限;二是常规多旋翼无人机的姿态特征和位置特征是相互耦合的,若想改变其水平位置,必须通过改变其姿态,以便产生水平方向的驱动分力,趋使无人机产生水平方向的加速度,进而产生速度和位移,因此其飞行包线不包含所有的姿态,使用范围受到一定限制。分析多旋翼无人机应用场景可以发现,无人机往往需要加装云台来改变云台俯仰方向的角度来满足载具的姿态要求,滚转方向往往需要保持水平,比如执行摄影、测绘等任务的无人机。根据搭载装置的重量及任务类型,需要选取合适的云台电机,有时装置需要很大的力矩才能保证云台的正常工作,就需要选用很大的云台电机,这无形中增加了整机的重量,降低了飞机的续航时间。云台系统作为机载设备,也是需要控制其姿态的,然而云台姿态和无人机姿态又是相互耦合的,这又增加了飞行控制器的任务量和控制器的设计难度。
6、另一方面,智能遥控车辆是各高校和相关企业研究的重点,其具有操作简单,能耗低,行使稳定等特点。然而车辆在越障能力和灵活性等方面远不如无人机。尤其在地形复杂的环境下,智能遥控车辆难以行驶,且其只能在支撑面上作业,比无人机少了一个移动维度。
7、基于以上所述,如何将多旋翼无人机与智能遥控汽车相结合,集成各自的优点,解决现有3类两栖飞行器存在的传动机构复杂、整机重量大、空中续航时间短、效率较低的问题,并避免常规多旋翼无人机的上述缺陷,是本发明要研究内容。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种灵巧陆空两栖飞行器,通过四个独立控制的中空轴无刷电机连接四个旋翼机臂,实现旋翼机臂绕中空轴无刷电机的轴线转动,四个旋翼机臂内均设有旋翼电机用于驱动桨叶旋转,旋翼机臂设有用于地面行走的竖直环和橡胶轮胎,使该飞行器不但能够实现在空中时,可在任意俯仰角悬停及运动,以翻越障碍或快速空中飞行,而且在陆地上可以轮式行进,降低能量消耗和噪音。
3、本发明通过机构复用,用简单的机构实现在空中飞行与地面行走时不需要进行机构切换,能够快速合理变换行驶状态,适应复杂环境。解决了现有两栖飞行器存在的重量大、效率低、续航短、结构复杂的缺陷;避免了常规多旋翼无人机飞行包线不包含所有的俯仰方向姿态带来的使用范围受限问题,以及通过加装云台来满足载具俯仰方向姿态要求带来的重量增加和控制系统任务量大、设计复杂的缺陷。
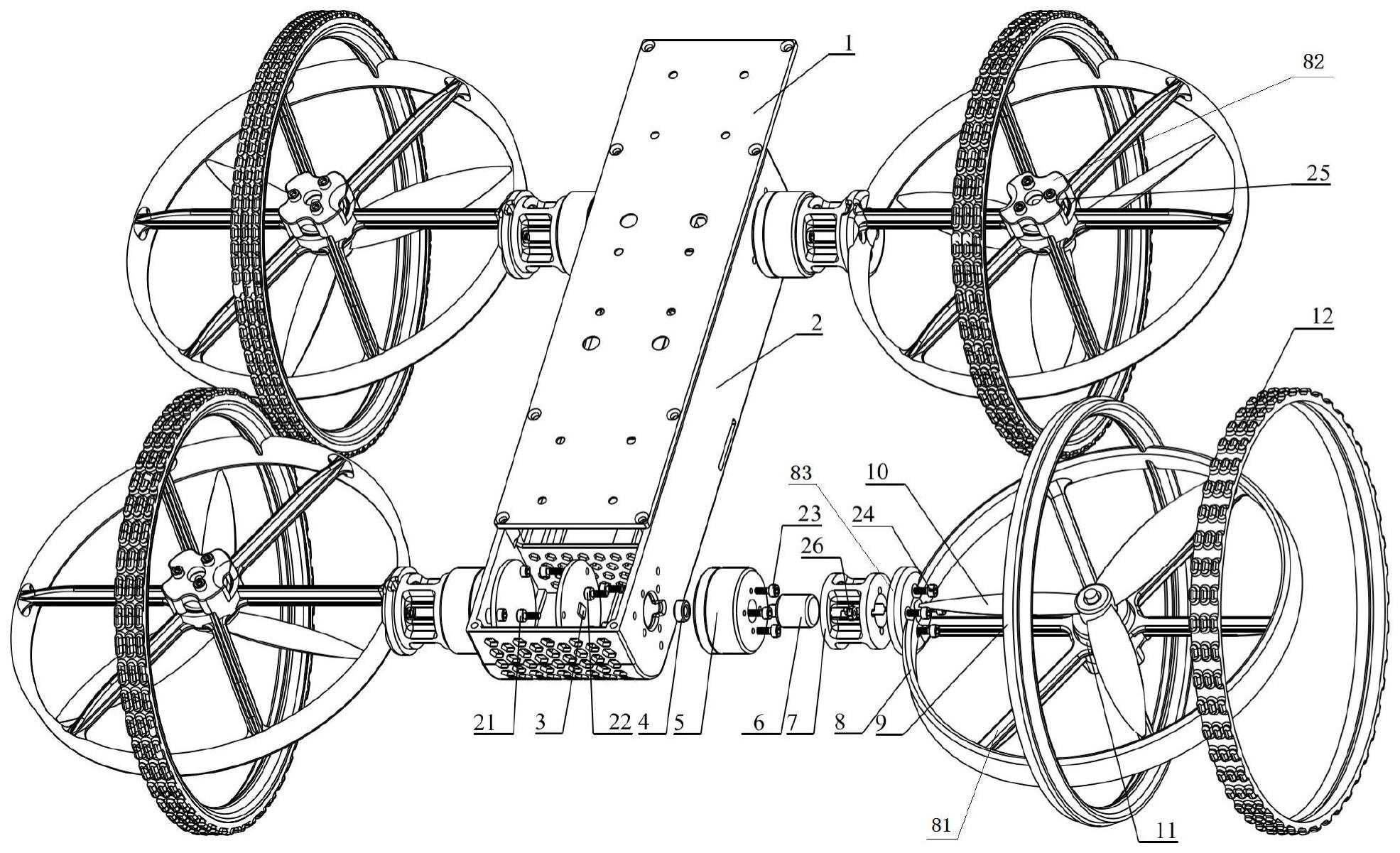
4、本发明的技术方案是:一种灵巧陆空两栖飞行器,包括机体2、4个旋翼机臂、控制系统、中空轴无刷电机5、径向磁环4、磁传感器3,所述控制系统安装于机体2内,4个所述旋翼机臂对称安装于机体2两侧并位于同一平面内,所述每个旋翼机臂通过1个中空轴无刷电机5与机体2侧壁转动连接;
5、所述中空轴无刷电机5的转子51与旋翼机臂固连,其底座52与机体2侧壁固连,中空轴无刷电机5与控制系统电连接;
6、所述每个中空轴无刷电机5的中空转子轴53内靠近机体2一端安装1个径向磁环4,每个径向磁环4对应一个磁传感器3;所述磁传感器3固定于机体2侧壁内表面,与中空轴无刷电机5同轴,并通过导线与控制系统电连接;磁传感器3用于检测转子51的角度信息并传递给控制系统;
7、所述旋翼机臂包括导电滑环6、导电滑环套7、水平环8、竖直环9、桨叶10和旋翼电机11;所述水平环8和竖直环9垂直交叉并固定连接;所述旋翼电机11安装于水平环8中心位置,旋翼电机11的输出轴安装有桨叶10;所述导电滑环套7一端固连水平环8的侧壁,另一端与中空轴无刷电机5的转子51固连;所述导电滑环6同轴安装于导电滑环套7内,其固定端62通过导线32与控制系统电连接,其滑动端61通过导线31与旋翼电机11连接,为旋翼电机11供电;
8、通过控制系统控制中空轴无刷电机5带动旋翼机臂绕中空轴无刷电机5的轴线转动,控制系统控制旋翼电机11带动桨叶10旋转,实现飞行器的空中飞行与地面行走。
9、本发明的进一步技术方案是:所述竖直环9与导电滑环套7、中空轴无刷电机5共轴线,竖直环9的外圈套装有橡胶轮胎12,用于地面行驶。
10、本发明的进一步技术方案是:所述机体2侧壁设有与中空轴无刷电机5的中空转子轴53相对应的通孔,通孔周向第一圆周均布4个安装孔,与中空轴无刷电机5底座52的螺纹孔相匹配,用于安装螺栓22固定底座52;通孔周向第二圆周位于机体2侧壁的内侧均布有3个凸台,凸台中心设有螺纹通孔,用于安装螺栓21固定磁传感器3。
11、本发明的进一步技术方案是:所述导电滑环6固定端62的连接导线32依次穿过中空轴无刷电机5的中空转子轴53、径向磁环4、机体2的侧壁,从径向磁环4和磁传感器3之间的间隙引出与机体2内部的控制系统电连接;所述导电滑环6的滑动端61与导电滑环套7固定连接,随导电滑环套7转动,用于避免滑动端61与旋翼电机11连接的导线31出现打结或扭断。
12、本发明的进一步技术方案是:所述水平环8沿径向均布有多条加强筋81,水平环的中心位置设有安装座82;所述旋翼电机11的底座通过螺栓25与安装座82固定连接;所述水平环8、旋翼电机11、桨叶10共轴线;水平环8的侧壁设有连接盘83,通过螺栓24、螺母26将连接盘83与导电滑环套7固定连接。
13、本发明的进一步技术方案是:所述控制系统包括无刷电机驱动板、电子调速器、飞行控制器和电池,所述无刷电机驱动板、电子调速器均与飞行控制器和电池电连接,无刷电机驱动板、电子调速器受飞行控制器控制。
14、本发明的进一步技术方案是:所述中空轴无刷电机5与无刷电机驱动板电连接;所述导电滑环6的固定端62通过导线32与电子调速器连接;所述磁传感器3与无刷电机驱动板电连接并向其传递检测到的角度信息,最终将角度信息传递至飞行控制器。
15、有益效果
16、本发明的有益效果在于:本发明所述一种灵巧陆空两栖飞行器,抛弃了构造复杂且机构较重的传统两栖飞行器结构,采用四个旋翼布局,通过安装4个中空轴无刷电机、4个旋翼电机,能够独立控制4个矢量推力单元的推力大小和方向,解除了常规多旋翼无人机的俯仰姿态特征和位置特征的相互耦合,使飞行器能够实现在空中时俯仰方向可全角度悬停及运动;通过机构复用,又把旋翼机臂作为地面驱动轮,通过控制中空轴无刷电机转动,带动整个旋翼机臂转动,驱动飞行器在地面行进。
17、常规的多旋翼无人机所有动力单元的旋翼电机固定布置,其只能产生固定方向的推力,这样的结构设计使得其只能分别控制1个维度的推力和3个维度的力矩,只能够独立跟踪控制4个特征量,分别为1个偏航角和3个位置量。本发明通过安装于机体的4个中空轴无刷电机,能够分别带动4个旋翼机臂,构成4个矢量推力单元。当在空中飞行时,本发明通过飞行控制器独立控制转动4个中空轴无刷电机和4个旋翼电机,使各推力单元产生不同方向和大小的作用力,能够分别独立控制机身前后方向和垂直机身方向2个维度的推力,以及3个维度的力矩,进而能独立跟踪控制5个特征量,分别为飞行器的俯仰角和偏航角,以及飞行器在空间3维各方向上的位移,这样就能够实现飞行器在空中时可在任意俯仰角悬停,且水平运动时能够保持俯仰角不变。本发明与常规的多旋翼无人机相比,在空中多出1个俯仰角独立控制量,有更强的姿态保持能力,灵活性更好,使用场景更广。
18、当本发明所述飞行器在地面行驶时,通过安装于机体的4个中空轴无刷电机,能够分别带动各个旋翼机臂,作为独立控制的4个驱动轮。通过组合控制4个中空轴无刷电机转子的转速大小和转动方向,即可实现前进、原地转向、曲线行驶及后退等动作。在地面有较为灵活的机动特性,在有复杂障碍物的地面环境中,有较强的绕行能力。
19、本发明采用水平环、竖直环双环交叉型结构的旋翼机臂,将桨叶自然地安装在双环中的环腔内,这种旋翼在内而双环在外的布局方式,不仅保证了竖直环的正常滚动行进功能,而且双环又能作为桨叶的外部保护结构,这样就避免复杂的地面环境对桨叶产生的可能伤害。采用的双环交叉型轮体结构,实现了轮径大、质量轻的目的,使该飞行器具有良好的翻越障碍的能力。同时橡胶轮胎和竖直环都自带一定的弹性,起到了飞行器起落架的减震效果,尤为适用于在复杂环境下反复起降。
20、本发明通过使用导电滑环连接旋翼电机,实现旋翼电机能够跟随旋翼机臂一起旋转,且连接旋翼电机的导线不会出现打结或扭断。
- 还没有人留言评论。精彩留言会获得点赞!