障碍物检测方法、路径规划方法、车辆及存储介质与流程
本发明涉及车辆驾驶,具体涉及障碍物检测方法、路径规划方法、车辆及计算机可读存储介质。
背景技术:
1、在自动驾驶技术中,辅助驾驶系统在监测到双手脱离方向盘超过一定时限后,辅助驾驶系统会接管方向盘的控制权,根据监测到的车道线、行人、交通灯等路况信息,自主做出方向控制,使车辆行驶至路中间行驶、避免碰撞等操作,大大方便了驾驶员的行车。在相关技术中,首先采用摄像头采集车辆周围的路况图像信息,然后通过车联网通信将采集的路况图像信息上传至云端服务器,以使云端服务器对预设范围内的多个车辆采集的路况图像信息进行计算处理,从而获取相应路段的交通状况信息,最后将交通状况信息发送给即将驶入相应路段的车辆,以躲避相应路段的静态障碍物。但是,由于车辆实际行驶过程中道路环境复杂多变,光照强度、晴雨天、反光面等都会对摄像头采集的路况图像信息造成影响,从而导致对车辆行驶路面上的静态障碍物的检测准确性较低。
技术实现思路
1、有鉴于此,本发明提供了一种障碍物检测方法、路径规划方法、车辆及计算机可读存储介质,以解决对车辆行驶路面上的静态障碍物的检测准确性较低的问题。
2、第一方面,本发明提供了一种障碍物检测方法,所述障碍物检测方法包括:
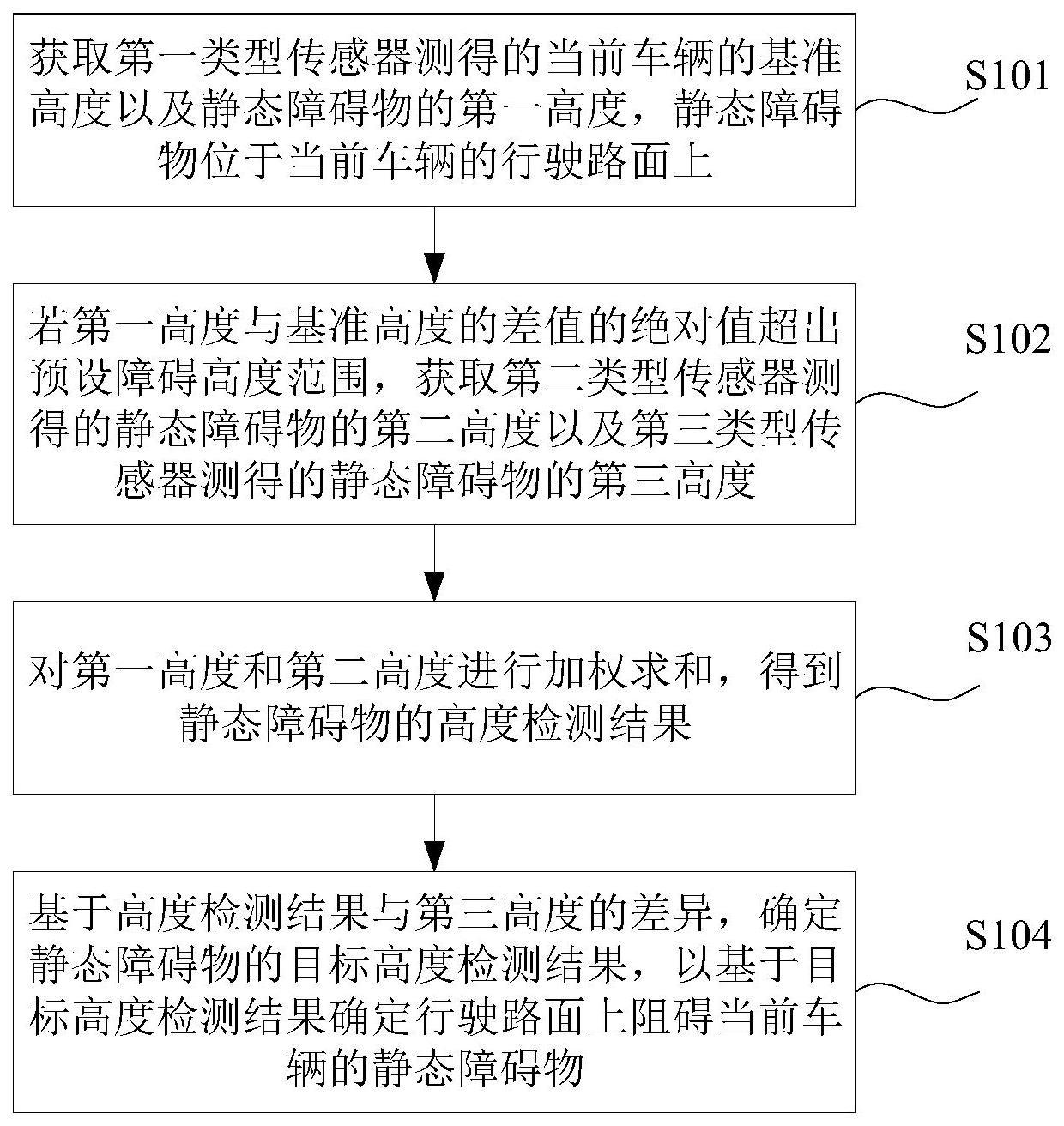
3、获取第一类型传感器测得的当前车辆的基准高度以及静态障碍物的第一高度,所述静态障碍物位于所述当前车辆的行驶路面上;
4、若所述第一高度与所述基准高度的差值的绝对值超出预设障碍高度范围,获取第二类型传感器测得的所述静态障碍物的第二高度以及第三类型传感器测得的所述静态障碍物的第三高度;
5、对所述第一高度和所述第二高度进行加权求和,得到所述静态障碍物的高度检测结果;
6、基于所述高度检测结果与所述第三高度的差异,确定所述静态障碍物的目标高度检测结果,以基于所述目标高度检测结果确定所述行驶路面上阻碍所述当前车辆的静态障碍物。
7、根据上述技术手段,一方面,融合不同类型传感器测得的当前车辆的行驶路面上静态障碍物的高度数据,确定静态障碍物的目标高度检测结果,以基于目标高度检测结果确定行驶路面上阻碍当前车辆的静态障碍物,因此能够规避单一类型传感器检测行驶路面上的静态障碍物带来的信息片面、不准确的问题,以提高对车辆行驶路面上静态障碍物检测的准确性。另一方面,在测得第一高度与基准高度的差值的绝对值超出预设障碍高度范围时,才获取第二类型传感器和第三类型传感器测得的静态障碍物的第二高度以及第三高度,也能够避免第二类型传感器和第三类型传感器测得的无效信息。
8、在一种可选的实施方式中,所述基于所述高度检测结果与所述第三高度的差异,确定所述静态障碍物的目标高度检测结果,包括:
9、基于所述高度检测结果与所述第三高度的差值的绝对值,得到所述静态障碍物的高度数据差;
10、当所述高度数据差位于第一预设高度差范围时,将所述高度检测结果确定为所述静态障碍物的目标高度检测结果;
11、当所述高度数据差位于第二预设高度差范围时,将所述高度检测结果与所述第三高度进行加权求和,确定出所述静态障碍物的目标高度检测结果,所述第二预设高度差范围的数值大于所述第一预设高度差范围的数值;
12、当所述高度数据差位于第三预设高度差范围时,重新获取所述第一类型传感器、所述第二类型传感器和所述第三类型传感器测得的第一高度、第二高度和第三高度,以确定所述静态障碍物的目标高度检测结果,或者,根据预设的传感器优先级从所述第一高度、所述第二高度和所述第三高度中确定所述静态障碍物的目标高度检测结果。
13、根据上述技术手段,基于高度检测结果与第三高度之间的高度数据差,在高度数据差较小时,将高度检测结果作为静态障碍物的目标高度检测结果,以避免增加目标高度检测结果的计算工作量;在高度数据差适中时,将高度检测结果与第三高度进行加权求和,得到静态障碍物的目标高度检测结果,从而能够结合不同类型传感器检测静态障碍物的高度,以确保静态障碍物的目标高度检测结果的准确性。而在高度数据差较大时,重新获取第一、第二、第三高度,或者,根据预设的传感器优先级从第一、第二和第三高度中确定静态障碍物的目标高度检测结果,则能够在一定程度上减小由于单个类型传感器测量的静态障碍物的高度错误所带来的影响。
14、在一种可选的实施方式中,所述当所述高度数据差位于第三预设高度差范围时,重新获取所述第一类型传感器、所述第二类型传感器和所述第三类型传感器测得的第一高度、第二高度和第三高度,以确定所述静态障碍物的目标高度检测结果,或者,根据预设的传感器优先级从所述第一高度、所述第二高度和所述第三高度中确定所述静态障碍物的目标高度检测结果,包括:
15、当所述高度数据差位于第三预设高度差范围时,判断上一次测得的高度数据差是否位于所述第三预设高度差范围;
16、若上一次测得的高度数据差不位于所述第三预设高度差范围,重新获取所述第一类型传感器、所述第二类型传感器和所述第三类型传感器测得的第一高度、第二高度和第三高度,以确定所述静态障碍物的目标高度检测结果;
17、若上一次测得的高度数据差位于所述第三预设高度差范围,根据预设的传感器优先级从所述第一高度、所述第二高度和所述第三高度中确定所述静态障碍物的目标高度检测结果。
18、根据上述技术手段,在高度数据差首次位于第三预设高度差范围时,先重新获取不同类型传感器测得的第一高度、第二高度和第三高度,以确定静态障碍物的目标高度检测结果,若后续仍测得高度数据差位于第三预设高度差范围,才根据传感器优先级从第一、第二和第三高度中确定静态障碍物的目标高度检测结果。因此,能够克服由于传感器出现短暂性错误所造成的高度数据差与第三高度的数据偏差过大的问题。
19、第二方面,本发明提供了一种路径规划方法,所述路径规划方法包括:
20、获取当前车辆的行驶路面上静态障碍物的目标高度检测结果,所述目标高度检测结果是基于上述第一方面或其对应的任一所述障碍物检测方法得到的;
21、若所述目标高度检测结果与所述基准高度的差值的绝对值超出所述预设障碍高度范围,获取所述行驶路面上的车道线信息、所述静态障碍物与所述当前车辆的横纵向距离、以及所述静态障碍物的其他属性的属性检测结果,所述其他属性包括长度和/或宽度;
22、基于所述目标高度检测结果、所述车道线信息、所述横纵向距离以及所述其他属性的属性检测结果,对所述当前车辆的当前规划轨迹进行调整。
23、根据上述技术手段,在通过障碍物检测方法准确检测出行驶路面上静态障碍物的目标高度检测结果后,若判定目标高度检测结果与基准高度的差值的绝对值超出预设障碍高度范围,则获取行驶路面上的车道线信息、静态障碍物与当前车辆的横纵向距离、以及静态障碍物的其他属性的属性检测结果,以对当前车辆的当前规划轨迹进行调整。因此,能够使当前车辆有效避开行驶路面上的静态障碍物,以保证行车安全。
24、在一种可选的实施方式中,所述其他属性的属性检测结果的获取方式包括:
25、获取所述第二类型传感器测得的所述静态障碍物的其他属性的第一属性数据以及所述第三类型传感器测得的所述静态障碍物的其他属性的第二属性数据;
26、基于所述第一属性数据与所述第二属性数据的差异,确定所述静态障碍物的其他属性的属性检测结果。
27、根据上述技术手段,基于第二类型传感器和第三类型传感器测得的静态障碍物的其他属性的第一属性数据以及第二属性数据的差异,确定静态障碍物的其他属性的属性检测结果,因此能够规避单一类型传感器检测行驶路面上的静态障碍物带来的信息片面、不准确的问题,以提高所检测的静态障碍物的其他属性的属性检测结果的准确性。
28、在一种可选的实施方式中,所述基于所述第一属性数据与所述第二属性数据的差异,确定所述静态障碍物的其他属性的属性检测结果,包括:
29、基于所述其他属性的所述第一属性数据与所述第二属性数据的差值的绝对值,得到所述静态障碍物的其他属性的属性数据差;
30、当所述属性数据差位于第一预设数据差范围时,将所述第一属性数据确定为所述其他属性的属性检测结果;
31、当所述属性数据差位于第二预设数据差范围时,对所述第一属性数据与所述第二属性数据进行加权求和,确定出所述其他属性的属性检测结果,所述第二预设数据差范围的数值大于所述第一预设数据差范围的数值;
32、当所述属性数据差位于第三预设数据差范围时,重新获取所述第二类型传感器和所述第三类型传感器测得的第一属性数据和第二属性数据,或者,根据所述传感器优先级从所述第一属性数据和所述第二属性数据中确定所述其他属性的属性检测结果,所述第三预设数据差范围的数值大于所述第二预设数据差范围的数值。
33、根据上述技术手段,基于第一属性数据与第二属性数据之间的属性数据差,在属性数据差较小时,将第一属性数据作为静态障碍物的其他属性的属性检测结果,以避免增加属性检测结果的计算工作量;在属性数据差适中时,将第一属性数据与第二属性数据进行加权求和,得到静态障碍物的其他属性的属性检测结果,从而能够结合不同类型传感器测得的静态障碍物的其他属性,以确保静态障碍物的其他属性的属性检测结果的准确性。而在属性数据差较大时,重新获取第一、第二属性数据,或者,根据传感器优先级从第一、第二属性数据中确定静态障碍物的其他属性的属性检测结果,则能够在一定程度上减小由于单个类型传感器测量的静态障碍物的属性数据错误所带来的影响。
34、在一种可选的实施方式中,所述当所述属性数据差位于第三预设数据差范围时,重新获取所述第二类型传感器和所述第三类型传感器测得的第一属性数据和第二属性数据,或者,根据所述传感器优先级从所述第一属性数据和所述第二属性数据中确定所述其他属性的属性检测结果,包括:
35、当所述属性数据差位于第三预设数据差范围时,判断上一次测得的属性数据差是否位于所述第三预设数据差范围;
36、若上一次测得的属性数据差不位于所述第三预设数据差范围,重新获取所述第二类型传感器和所述第三类型传感器测得的第一属性数据和第二属性数据;
37、若上一次测得的属性数据差位于所述第三预设数据差范围,根据所述传感器优先级从所述第一属性数据和所述第二属性数据中确定所述其他属性的属性检测结果。
38、根据上述技术手段,在属性数据差首次位于第三预设数据差范围时,先重新获取第二和第三类型传感器测得的第一属性数据和第二属性数据,以确定静态障碍物的其他属性的属性检测结果,若后续仍测得属性数据差位于第三预设高度差范围,才根据传感器优先级从第一、第二属性数据中确定静态障碍物的其他属性的属性检测结果。因此,能够克服由于传感器出现短暂性错误所造成的第一属性数据与第二属性数据的数据偏差过大的问题。
39、在一种可选的实施方式中,所述基于所述目标高度检测结果、所述车道线信息、所述横纵向距离以及所述其他属性的属性检测结果,对所述当前车辆的当前规划轨迹进行调整,包括:
40、基于所述目标高度检测结果、所述车道线信息、所述横纵向距离以及所述其他属性的属性检测结果进行环境重构,得到环境重构信息,所述环境重构信息包括车道线范围、所述静态障碍物的区域范围和所述静态障碍物的三维障碍物位置;
41、基于所述环境重构信息对所述当前车辆的当前规划轨迹进行调整,以使所述当前车辆避开所述行驶路面上的静态障碍物且使所述当前车辆位于所述车道线范围内。
42、根据上述技术手段,首先基于车道线信息、横纵线距离以及静态障碍物的其他熟悉的属性检测结果进行环境重构,以得到适用于计算机计算环境的环境重构信息,再基于环境重构信息对当前车辆的当前规划轨迹进行调整,因此,能够使当前车辆明确静态障碍物和车道线的特征,以使当前车辆有效避开行驶路面上的静态障碍物且使当前车辆位于车道线范围内,从而保证行车安全。
43、第三方面,本发明提供了一种路径规划装置,所述障碍物检测装置包括:
44、第一信息获取模块,用于获取第一类型传感器测得的当前车辆的基准高度以及静态障碍物的第一高度,所述静态障碍物位于所述当前车辆的行驶路面上;
45、第二信息获取模块,用于若所述第一高度与所述基准高度的差值的绝对值超出预设障碍高度范围,获取第二类型传感器测得的所述静态障碍物的第二高度以及第三类型传感器测得的所述静态障碍物的第三高度;
46、高度信息融合模块,用于对所述第一高度和所述第二高度进行加权求和,得到所述静态障碍物的高度检测结果;
47、检测结果确认模块,用于基于所述高度检测结果与所述第三高度的差异,确定所述静态障碍物的目标高度检测结果,以基于所述目标高度检测结果确定所述行驶路面上阻碍所述当前车辆的静态障碍物。
48、第四方面,本发明提供了一种路径规划装置,其特征在于,所述路径规划装置包括:
49、检测结果获取模块,用于获取当前车辆的行驶路面上静态障碍物的目标高度检测结果,所述目标高度检测结果是基于上述第三方面所述的障碍物检测装置得到的;
50、轨迹信息获取模块,用于若所述目标高度检测结果与所述基准高度的差值的绝对值超出所述预设障碍高度范围,获取所述行驶路面上的车道线信息、所述静态障碍物与所述当前车辆的横纵向距离、以及所述静态障碍物的其他属性的属性检测结果,所述其他属性包括长度和/或宽度;
51、规划轨迹调整模块,用于基于所述目标高度检测结果、所述车道线信息、所述横纵向距离以及所述其他属性的属性检测结果,对所述当前车辆的当前规划轨迹进行调整。
52、第五方面,本发明提供了一种车辆,所述车辆包括:
53、车辆本体;
54、控制器,设置在所述车辆本体内,所述控制器用于执行上述任一实施方式所述的障碍物检测方法和/或上述任一实施方式所述的路径规划方法。
55、第六方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述任一实施方式所述的障碍物检测方法和/或上述任一实施方式所述的路径规划方法。
56、本发明的有益效果:
57、(1)本发明融合不同类型传感器测得的当前车辆的行驶路面上静态障碍物的数据,确定静态障碍物的检测结果,从而基于静态障碍物的检测结果确定行驶路面上阻碍当前车辆的静态障碍物,并结合静态障碍物的检测结果调整当前车辆的当前规划轨迹。因此能够规避单一类型传感器检测行驶路面上的静态障碍物带来的信息片面、不准确的问题,以提高对车辆行驶路面上静态障碍物检测的准确性,从而确保行车安全。
58、(2)本发明在测得第一高度与基准高度的差值的绝对值超出预设障碍高度范围时,才获取第二类型传感器和第三类型传感器测得的静态障碍物的第二高度以及第三高度。因此能够避免第二类型传感器和第三类型传感器测得的无效信息,以减少存储空间占用,提高静态障碍物的检测效率。
59、(3)本发明根据不同类型传感器测得的静态障碍物的数据差大小,在数据差较小时,选择将高度检测结果和第一属性数据作为静态障碍物的检测结果,因此能够避免增加计算量;在数据差适中时,对所有检测到的静态障碍物的同属性数据进行加权求和,以得到静态障碍物的检测结果,因此能够结合不同类型传感器测得的数据,以确保静态障碍物检测的准确性;在数据差较大时,重新获取不同类型传感器测得的数据或根据传感器优先级选择其中一个类型传感器测得的数据作为静态障碍物的检测结果,因此能够在一定程度上减小由于单个类型传感器测得的静态障碍物的数据错误所带来的影响。
- 还没有人留言评论。精彩留言会获得点赞!