一种基于VMS的自动化集装箱货场道口路径控制方法与流程
本发明涉及的是集装箱货场道口路径控制领域,特别涉及一种基于vms的自动化集装箱货场道口路径控制方法。
背景技术:
1、常规铁路道口控制系统是有人看守道口通知系统,列车位置传感器接收到列车接近道口信息,向道口控制系统发出音响和灯光报警信号,人工关闭道口栏木阻挡道路车辆通行,道路车辆在栏木外等待,确认列车通过后,人工开放道口栏木恢复交通,紧急情况下人工开放遮断信号机,栏停运行中的列车。常规自动道口也只是道口栏木实现了自动升降,道路车辆还是人工驾驶。
2、自动化集装箱码头水平运输系统(vehicle management system,vms)是码头装卸区域与堆场间集装箱运输路径及设备的控制系统。自动导引小车(automated guidedvehicles,agv)是一种移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。agv地面控制管理系统是vms的子系统,与自动化集装箱码头生产管理等系统之间的关系如图1所示。
3、现有集装箱码头铁路港口站为全自动控制系统,agv小车会根据规划的路径频繁经过铁路道口取送货物。而铁路运输系统为半自动系统,铁路列车或车列进入集装箱码头铁路港口站后会依次经过这些道口,影响agv运输效率。因此agv小车如何避免与铁路列车或车列产生路径冲突,提高运输效率成为一个重要的问题。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种基于vms的自动化集装箱货场道口路径控制方法。
2、为了解决上述技术问题,本技术实施例公开了如下技术方案:
3、一种基于vms的自动化集装箱货场道口路径控制方法,包括:
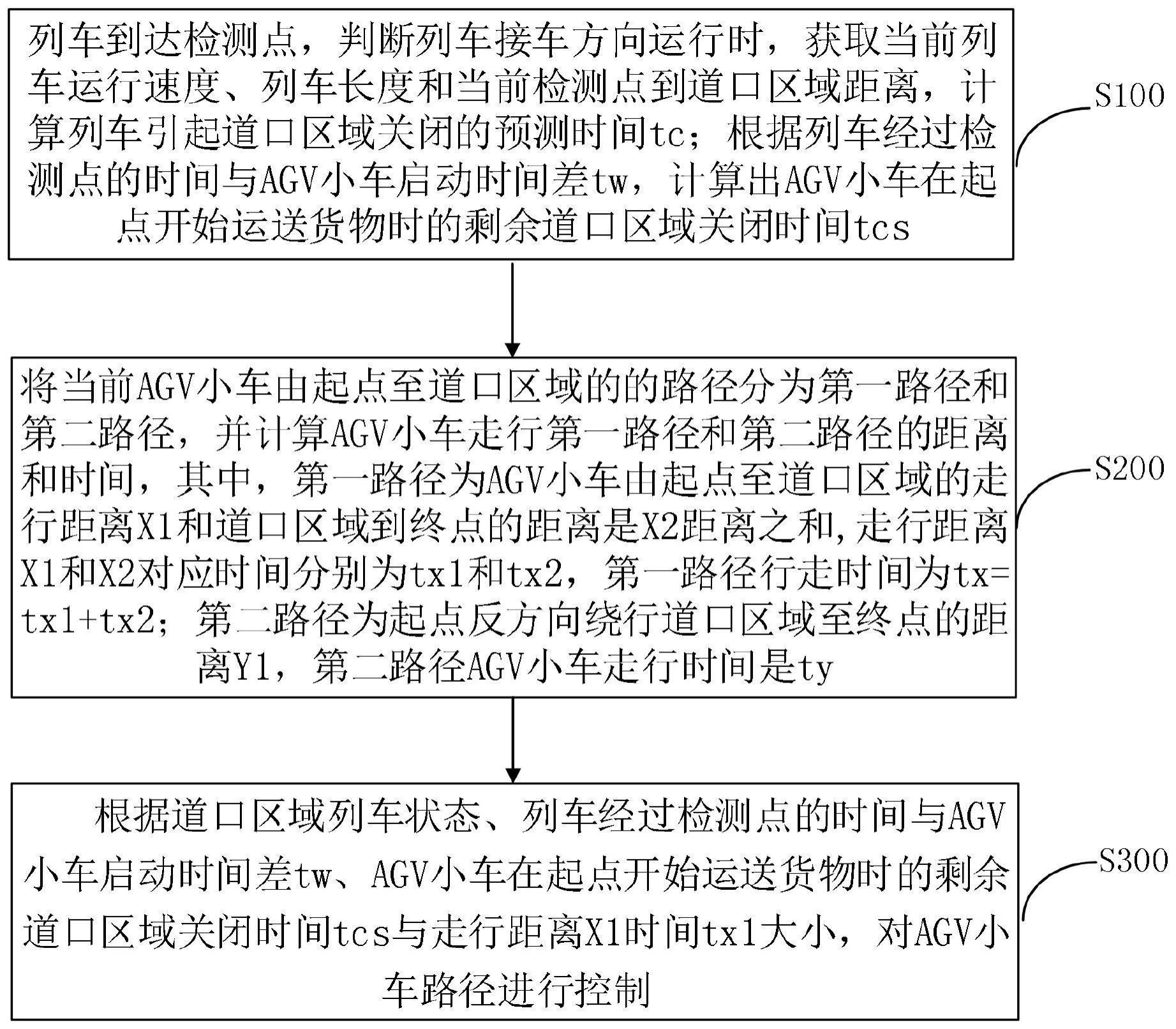
4、s100.列车到达检测点,判断列车接车方向运行时,获取当前列车运行速度、列车长度和当前检测点到道口区域距离,计算列车引起道口区域关闭的预测时间tc;根据列车经过检测点的时间与agv小车启动时间差tw,计算出agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs;
5、s200将当前agv小车由起点至道口区域的的路径分为第一路径和第二路径,并计算agv小车走行第一路径和第二路径的距离和时间,其中,第一路径为agv小车由起点至道口区域的走行距离x1和道口区域到终点的距离是x2距离之和,走行距离x1和x2对应时间分别为tx1和tx2,第一路径行走时间为tx=tx1+tx2;第二路径为起点反方向绕行道口区域至终点的距离y1,第二路径agv小车走行时间是ty;
6、s300.根据道口区域列车状态、列车经过检测点的时间与agv小车启动时间差tw、agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs与走行距离x1时间tx1大小,对agv小车路径进行控制。
7、进一步地,s100中,列车引起道口区域关闭的预测时间tc、列车经过检测点的时间与agv小车启动时间差tw、agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs的关系为:
8、tcs=tc+tw
9、其中,tcs为agv小车在起点开始运送货物时的剩余道口区域关闭时间,tc为列车引起道口区域关闭的预测时间,tw为列车经过检测点的时间与agv小车启动时间差,当列车接近检测点时间晚于agv起点启动时,tw是一个负值;当列车接近a点时间早于agv小车起点启动时,tw是一个正值;当列车接近检测点时间等于agv起点启动时,tw为0。
10、进一步地,s200中,通过分别获取列车到达检测点速度v1,agv小车速度为v2,计算agv小车由起点至道口区域的走行距离的时间tx1=x1/v1,道口区域到终点的距离的实际tx2=x2/v1;第二路径agv小车走行时间ty=y1/v2。
11、进一步地,s300中,当道口区域无列车时,直接比较第一路径行走时间tx与第二路径agv小车走行时间ty的大小,并将行走时间小的路径作为agv小车走行最佳路径。
12、进一步地,s300中,当道口区域有列车时,且列车接近a点时间晚于agv起点启动,tw是一个负值时,则继续比较agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs和agv小车由起点至道口区域的走行距离x1的时间tx1大小,判断agv小车走行最佳路径。
13、进一步地,s300中,若tcs>tx1,则第一路径行走时间txs=tcs+tx2-2tw;第二路径行走时间tys=ty+tw;比较第一路径行走时间txs和第二路径行走时间tys大小,并将行走时间小的路径作为agv小车走行最佳路径。
14、进一步地,s300中,若tcs≤tx1,则第一路径行走时间txs=tx1+tx2-2tw;第二路径行走时间tys=ty+tw,比较第一路径行走时间txs和第二路径行走时间tys大小,并将行走时间小的路径作为agv小车走行最佳路径。
15、进一步地,s300中,当有列车接近道口,且列车接近a点时间早于agv起点启动,tw是一个正值时,则继续比较agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs和agv小车由起点至道口区域的走行距离x1的时间tx1大小,判断agv小车走行最佳路径。
16、进一步地,s300中,若tcs>tx1,则第一路径行走时间txs=tcs+tx2;第二路径行走时间tys=ty;若tcs≤tx1,则第一路径行走时间txs=tx1+tx2;第二路径行走时间tys=ty,比较第一路径行走时间txs和第二路径行走时间tys大小,并将行走时间小的路径作为agv小车走行最佳路径。
17、进一步地,本发明公开的一种基于vms的自动化集装箱货场道口路径控制方法,还包括:列车到达检测点,判断列车发车方向运行时,以agv小车的位置作为起点,agv小车从起点到道口区域的时间为tcs’,若agv小车从起点到道口区域的时间tcs’>第一路径为agv小车由起点至道口区域的走行距离x1的时间tx1,则第一路径行走时间txs=tcs’+tx2;则第二路径行走时间tys=ty;若agv小车从起点到道口区域的时间tcs’≤第一路径为agv小车由起点至道口区域的走行距离x1的时间tx1,则第一路径行走时间txs=tx1+tx2;则第二路径行走时间tys=ty;比较第一路径行走时间txs和第二路径行走时间tys大小,并将行走时间小的路径作为agv小车走行最佳路径。
18、本发明实施例提供的上述技术方案的有益效果至少包括:
19、本发明公开的一种基于vms的自动化集装箱货场道口路径控制方法,包括:列车到达检测点,判断列车接车方向运行时,获取当前列车运行速度、列车长度和当前检测点到道口区域距离,计算列车引起道口区域关闭的预测时间tc;根据列车经过检测点的时间与agv小车启动时间差tw,计算出agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs;将当前agv小车由起点至道口区域的的路径分为第一路径和第二路径,并计算agv小车走行第一路径和第二路径的距离和时间,其中,第一路径为agv小车由起点至道口区域的走行距离x1和道口区域到终点的距离是x2距离之和,走行距离x1和x2对应时间分别为tx1和tx2,第一路径行走时间为tx=tx1+tx2;第二路径为起点反方向绕行道口区域至终点的距离y1,第二路径agv小车走行时间是ty;根据道口区域列车状态、列车经过检测点的时间与agv小车启动时间差tw、agv小车在起点开始运送货物时的剩余道口区域关闭时间tcs与走行距离x1时间tx1大小,对agv小车路径进行控制。
20、本发明公开的一种基于vms的自动化集装箱货场道口路径控制方法,解决了集装箱铁水联运铁路列车在港区集装箱货场与全自动港区集装箱管理系统agv小车在平交道口处的运行安全和效率问题,实现了自动化集装箱铁路货场道口的安全运输。
21、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!