一种车身姿态检测方法、系统、终端及存储介质与流程
本发明涉及车身姿态检测领域,具体涉及一种车身姿态检测方法、系统、终端及存储介质。
背景技术:
1、车身姿态的倾斜将会使悬架产生一定的偏转角,使得在车辆在直行的过程中会出现跑偏等问题,从而影响车辆的操纵性,严重时更会增加车辆在转向过程中侧翻的概率,危及驾乘人员的生命安全,为保证车辆的操纵性和安全性,应及时对车身姿态进行控制。
2、对车身姿态的控制需要对车身姿态进行测量和计算,传统的车身姿态测量方法主要依赖于惯性传感器,如陀螺仪、加速度计等惯性传感器,但由于惯性传感器的误差随着时间积累,长时间使用会导致精度下降。另外,传统的车身姿态计算方法主要以车辆出厂时预设的基础姿态为计算基准,不能针对车辆载荷增加或减少、以及载荷位置分布不同而矫正基础姿态,也不能根据路面不规则情况来矫正计算偏差,影响车身姿态的控制精度。
技术实现思路
1、为解决上述问题,本发明提供一种车身姿态检测方法、系统、终端及存储介质,使用红外测距传感器测量对车身姿态进行测量,不会因时间推移而产生误差,同时根据测量的距离数据更新基础姿态数据,矫正计算偏差,有利于提高车身姿态控制精度。
2、第一方面,本发明的技术方案提供一种车身姿态检测方法,包括以下步骤:
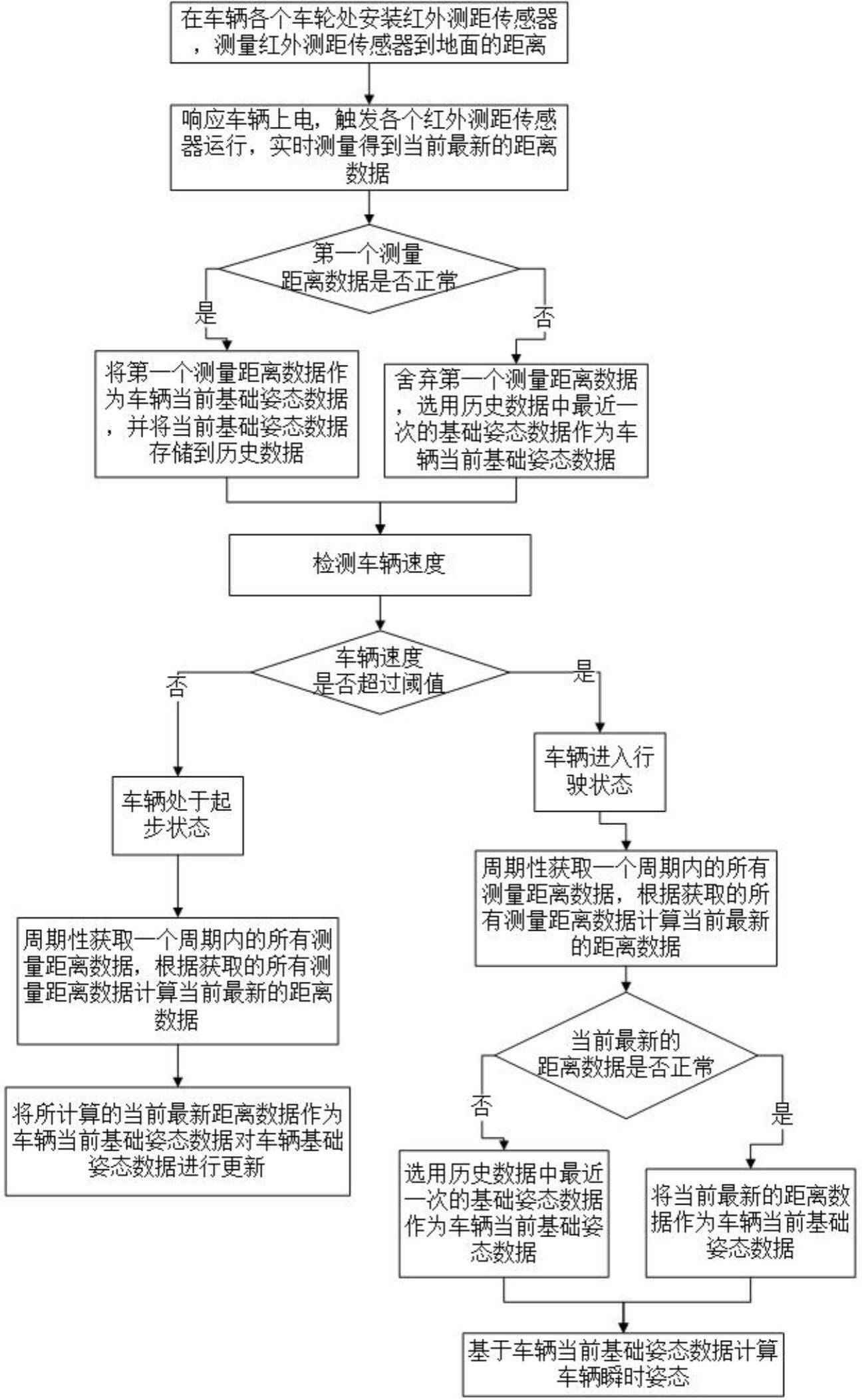
3、在车辆各个车轮处安装红外测距传感器,测量红外测距传感器到地面的距离;
4、响应车辆上电,触发各个红外测距传感器运行,测量得到第一个测量距离数据;
5、判断第一个测量距离数据是否正常;
6、若正常,将第一个测量作为车辆当前基础姿态数据,并将当前基础姿态数据存储到历史数据;
7、若不正常,舍弃第一个测量距离数据,选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据。
8、在一个可选的实施方式中,将第一个测量作为车辆当前基础姿态数据或选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据之后,还包括以下步骤:
9、红外测距传感器实时测量得到当前最新的距离数据;
10、检测车辆速度;
11、判断车辆速度是否超过阈值;
12、若是,判定车辆进入行驶状态;否则,判定车辆处于起步状态;
13、响应车辆进入行驶状态,周期性获取一个周期内的所有测量距离数据,根据获取的所有测量距离数据计算当前最新的距离数据;
14、判断当前最新的距离数据是否正常;
15、若正常,则将当前最新的距离数据作为车辆当前基础姿态数据;
16、若不正常,则选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据;
17、基于车辆当前基础姿态数据计算车辆瞬时姿态。
18、在一个可选的实施方式中,基于车辆当前基础姿态数据计算车辆瞬时姿态,具体包括:
19、提取历史数据中最近一次的基础姿态数据,将其与车辆当前基础姿态数据求差,所计算差值为车辆瞬时姿态。
20、在一个可选的实施方式中,该方法还包括以下步骤:
21、响应车辆处于起步状态,周期性获取一个周期内的所有测量距离数据,根据获取的所有测量距离数据计算当前最新的距离数据;
22、将所计算的当前最新距离数据作为车辆当前基础姿态数据对车辆基础姿态数据进行更新。
23、在一个可选的实施方式中,根据获取的所有测量距离数据计算当前最新的距离数据,具体包括:
24、将所有测量距离数据计算平均值;
25、所计算平均值为当前最新的距离数据。
26、在一个可选的实施方式中,判断当前最新的距离数据是否正常,具体包括:
27、计算当前最新的距离数据与预设缺省距离之间的差值;
28、判断差值是否在预设范围内;
29、若是,则当前最新的距离数据正常;
30、若否,则当前最新的距离数据异常。
31、第二方面,本发明的技术方案提供一种车身姿态检测系统,包括,
32、距离测量模块:响应车辆上电,触发各个红外测距传感器运行,测量得到第一个测量距离数据;
33、距离判断模块:判断第一个测量距离数据是否正常;
34、起步基础姿态确定模块:若距离判断模块的判断结果为正常,将第一个测量距离数据作为车辆当前基础姿态数据,并将当前基础姿态数据存储到历史数据;若距离判断模块的判断结果为不正常,舍弃第一个测量距离数据,选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据。
35、在一个可选的实施方式中,距离测量模块还用于在起步基础姿态确定模块将第一个测量作为车辆当前基础姿态数据或选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据之后,触发各个红外测距传感器实时测量得到当前最新的距离数据;
36、该系统还包括,
37、车辆状态检测模块:检测车辆速度;判断车辆速度是否超过阈值;若是,判定车辆进入行驶状态;否则,判定车辆处于起步状态;
38、最新距离计算模块:响应车辆进入行驶状态,红外测距传感器实时测量距离数据,周期性选择一定时长内的距离数据,根据所选择距离数据计算当前最新的距离数据;
39、行车基础姿态确定模块:若所计算最新的距离数据正常,则将当前最新的距离数据作为车辆当前基础姿态数据;若所计算最新的距离数据不正常,则选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据;
40、瞬时姿态计算模块:基于车辆当前基础姿态数据计算车辆瞬时姿态。
41、第三方面,本发明的技术方案提供一种终端,包括:
42、存储器,用于存储车身姿态检测程序;
43、处理器,用于执行所述车身姿态检测程序时实现如上述任一项所述车身姿态检测方法的步骤。
44、第四方面,本发明的技术方案提供一种计算机可读存储介质,所述可读存储介质上存储有车身姿态检测程序,所述车身姿态检测程序被处理器执行时实现如上述任一项所述车身姿态检测方法的步骤。
45、本发明提供的一种车身姿态检测方法、装置、终端及存储介质,相对于现有技术,具有以下有益效果:将红外测距传感器安装在各个车轮处,实时测量传感器到地面的距离,根据测量距离调整车身基准姿态数据。本发明使用红外测距传感器测量对车身姿态进行测量,不会因时间推移而产生误差,同时根据测量的距离数据更新基础姿态数据,矫正计算偏差,有利于提高车身姿态控制精度。
技术特征:
1.一种车身姿态检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车身姿态检测方法,其特征在于,将第一个测量作为车辆当前基础姿态数据或选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据之后,还包括以下步骤:
3.根据权利要求2所述的车身姿态检测方法,其特征在于,基于车辆当前基础姿态数据计算车辆瞬时姿态,具体包括:
4.根据权利要求2或3所述的车身姿态检测方法,其特征在于,该方法还包括以下步骤:
5.根据权利要求4所述的车身姿态检测方法,其特征在于,根据获取的所有测量距离数据计算当前最新的距离数据,具体包括:
6.根据权利要求5所述的车身姿态检测方法,其特征在于,判断当前最新的距离数据是否正常,具体包括:
7.一种车身姿态检测系统,其特征在于,包括,
8.根据权利要求7所述的车身姿态检测系统,其特征在于,距离测量模块还用于在起步基础姿态确定模块将第一个测量作为车辆当前基础姿态数据或选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据之后,触发各个红外测距传感器实时测量得到当前最新的距离数据;
9.一种终端,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述可读存储介质上存储有车身姿态检测程序,所述车身姿态检测程序被处理器执行时实现如权利要求1-6任一项所述车身姿态检测方法的步骤。
技术总结
本发明涉及车身姿态检测领域,具体公开一种车身姿态检测方法、系统、终端及存储介质,在车辆各个车轮处安装红外测距传感器,测量红外测距传感器到地面的距离;响应车辆上电,触发各个红外测距传感器运行,测量得到第一个测量距离数据;判断第一个测量距离数据是否正常;若正常,将第一个测量作为车辆当前基础姿态数据,并将当前基础姿态数据存储到历史数据;若不正常,舍弃第一个测量距离数据,选用历史数据中最近一次的基础姿态数据作为车辆当前基础姿态数据。本发明使用红外测距传感器测量对车身姿态进行测量,不会因时间推移而产生误差,同时根据测量的距离数据更新基础姿态数据,矫正计算偏差,有利于提高车身姿态控制精度。
技术研发人员:王以华,杨坤龙,刘威
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!