一种基于车辆外观变化的自修正图像采集系统及方法与流程
本发明涉及图像采集,具体而言,涉及一种基于车辆外观变化的自修正图像采集系统及方法。
背景技术:
1、自动泊车系统是一种车辆辅助驾驶技术,旨在帮助驾驶员轻松完成停车操作。它使用传感器、摄像头、雷达和计算机算法等技术,通过自动控制车辆的加速、刹车、转向等操作,实现车辆的自动停放在指定的停车位或停车场。
2、当前的汽车自动泊车系统越来越普及,通过使用传感器、摄像头和算法来辅助驾驶员完成泊车操作。然而,在实际应用中,一些因素可能影响自动泊车的准确性和安全性。其中之一是在自动泊车操作中车辆周围的阴影可能会对图像采集产生干扰。阴影可能使障碍物的识别和距离估计变得困难,影响自动泊车系统的准确性和可靠性。自动泊车过程中,周围的物体可能会是动态的,例如行人、其他车辆或移动的障碍物。图像采集系统在处理这些动态物体时存在判断失误,容易引发碰撞。
3、因此,有必要设计一种基于车辆外观变化的自修正图像采集系统及方法用以解决当前自动泊车系统中存在的问题。
技术实现思路
1、鉴于此,本发明提出了一种基于车辆外观变化的自修正图像采集系统及方法,旨在解决当前自动泊车系统中图像采集时存在的阴影易造成判断失误以及动态物体识别困难的问题。
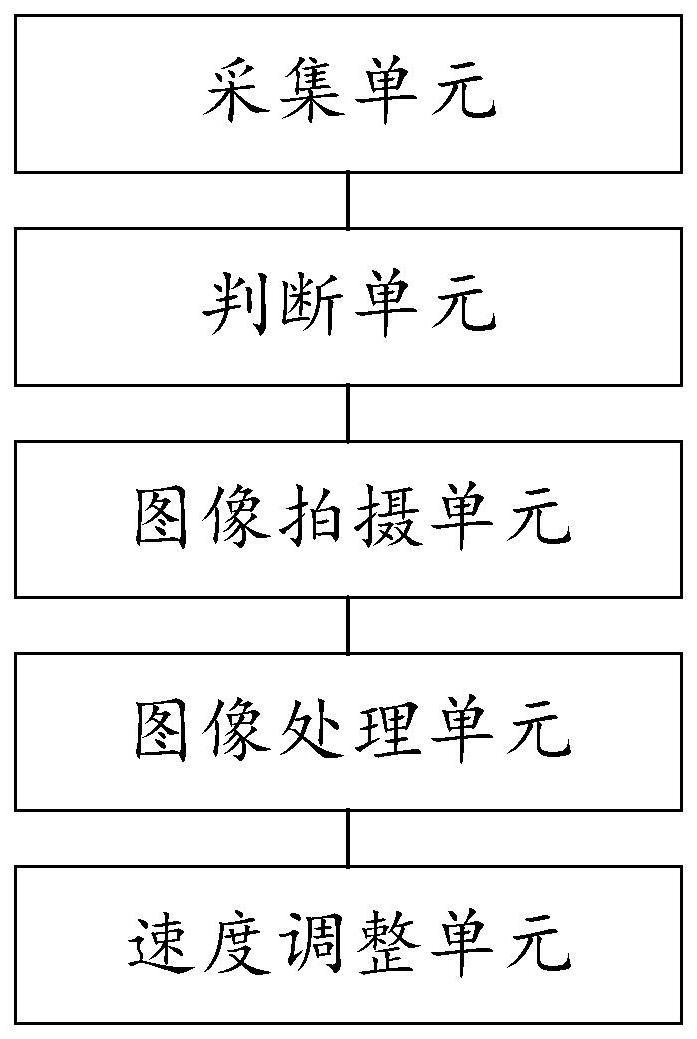
2、一个方面,本发明提出了一种基于车辆外观变化的自修正图像采集系统,包括:
3、采集单元,被配置为在车辆进行自动泊车时,采集光线传感器信号并判定车辆表面是否存在阴影遮挡;
4、判断单元,被配置为当所述采集单元判定所述车辆表面存在阴影遮挡时,获取所述车辆与障碍物的最小距离,将所述最小距离与预设距离进行比对,根据比对结果判断所述障碍物是否处在安全距离;
5、图像拍摄单元,被配置为当确定所述车辆表面存在阴影遮挡且所述障碍物不在安全距离时,对所述车辆表面进行图像拍摄,获取所述车辆表面的第一阴影遮挡,经过第一预设时间后再次对所述车辆表面进行图像拍摄,获取所述车辆表面的第二阴影遮挡;
6、图像处理单元,被配置为在所述图像拍摄单元获取所述第一阴影遮挡和第二阴影遮挡后,对所述第一阴影遮挡和第二阴影遮挡进行处理,判定所述第一阴影遮挡中的阴影位置与第二阴影遮挡中的阴影位置是否发生变化;
7、当所述图像处理单元确定阴影位置发生变化时,获取所述阴影位置的平均移动速度,根据所述平均移动速度判定所述障碍物是否可超越;当所述图像处理单元确定所述障碍物可超越时,控制所述车辆以第一运行速度运行自动泊车动作,并获取地面摩擦系数,根据地面摩擦系数对所述第一运行速度进行调整;
8、当所述图像处理单元确定阴影位置未发生变化时,判断所述障碍物是否在所述车辆的自动泊车行驶路线中,根据判断结果确定是否调整所述车辆的自动泊车行驶路线;
9、速度调整单元,被配置为当所述图像处理单元确定所述障碍物在所述车辆的自动泊车行驶路线中且对所述自动泊车行驶路线进行调整后,根据转弯角度选取所述车辆的自动泊车行驶速度。
10、进一步的,所述采集单元在车辆进行自动泊车时,采集光线传感器信号并判定车辆表面是否存在阴影遮挡在包括:
11、通过光线传感器获取光照强度g1,预先设定标准光照强度g0;所述采集单元将光照强度g1与所述标准光照强度g0进行比对,判断所述车辆表面是否存在阴影遮挡;
12、当g1≤g0时,判断所述车辆表面存在阴影遮挡;
13、当g1>g0时,判断所述车辆表面不存在阴影遮挡。
14、进一步的,当所述采集单元判定所述车辆表面存在阴影遮挡时,所述判断单元获取所述车辆与障碍物的最小距离,将所述最小距离与预设距离进行比对,根据比对结果判断所述障碍物是否处在安全距离,包括:
15、所述判断单元还用于预先设定预设距离j0;将所述最小距离j1与所述预设距离j0进行比对,根据比对结果判断所述障碍物是否处在安全距离;
16、当j0≤j1时,判断所述障碍物不处在安全距离,并控制所述车辆停止自动泊车动作;
17、当j0>j1时,判断所述障碍物处在安全距离,并控制所述车辆继续进行自动泊车动作。
18、进一步的,在确定所述障碍物不处在安全距离时,所述图像处理单元分别识别所述第一阴影遮挡和第二阴影遮挡的位置,通过位置变化轨迹获得阴影位移量w,根据所述阴影位移量w判断阴影位置是否发生变化;
19、当w>0时,判断所述阴影位置发生变化,并获取阴影位置的平均移动速度;
20、当w=0时,判断所述阴影位置未发生变化,并进一步判断所述障碍物是否在所述车辆的自动泊车行驶路线中。
21、进一步的,当所述图像处理单元确定阴影位置发生变化时,获取所述阴影位置的平均移动速度,根据所述平均移动速度判定所述障碍物是否可超越,包括:
22、所述图像处理单元获取第一阴影遮挡与第二阴影遮挡拍摄的时间差δt,根据所述位移量w与所述时间差δt获取平均移动速度预先设定移动速度阈值v0;根据所述平均移动速度与移动速度阈值v0的大小关系判定所述障碍物是否可超越;
23、当时,判定所述障碍物不可超越,控制所述车辆保持停止自动泊车的命令;
24、当时,判定所述障碍物可超越,控制所述车辆以第一运行速度v1运行自动泊车动作,并获取地面摩擦系数μ。
25、进一步的,当所述图像处理单元判定所述障碍物可超越,并获取地面摩擦系数μ时,根据所述地面摩擦系数μ与各预设摩擦系数的关系选取调整系数对所述第一运行速度v1进行调整;
26、所述图像处理单元还用于预先设定第一预设调整系数a1、第二预设调整系数a2和第三预设调整系数a3,且0.8<a1<a2<a3<1;
27、预先设定第一预设摩擦系数μ1、第二预设摩擦系数μ2和第三预设摩擦系数μ3,且μ1<μ2<μ3;
28、当μ1≤μ<μ2时,选取所述第一预设调整系数a1对所述第一运行速度v1进行调整,获取调整后的第一运行速度v1*a1;
29、当μ2≤μ<μ3时,选取所述第二预设调整系数a2对所述第一运行速度v1进行调整,获取调整后的第一运行速度v1*a2;
30、当μ3≤μ时,选取所述第三预设调整系数a3对所述第一运行速度v1进行调整,获取调整后的第一运行速度v1*a3。
31、进一步的,当所述图像处理单元确定阴影位置未发生变化时,判断所述障碍物是否在所述车辆的自动泊车行驶路线中,根据判断结果调整所述车辆的自动泊车行驶路线,包括:
32、获取所述车辆的转弯角度θ1;根据转弯角度θ1拟合出车辆的自动泊车行驶路线,将所述障碍物与所述自动泊车行驶路线放置在同一平面中;
33、当所述障碍物与所述自动泊车行驶路线出现重合时,判定所述障碍物在所述车辆的自动泊车行驶路线中;
34、当所述障碍物与所述自动泊车行驶路线未出现重合时,判定所述障碍物不在所述车辆的自动泊车行驶路线中。
35、进一步的,根据判断结果确定是否调整所述车辆的自动泊车行驶路线,包括:
36、当所述图像处理单元确定所述障碍物不在所述车辆的自动泊车行驶路线中时,不对所述车辆的转弯角度进行调整;
37、当所述图像处理单元确定所述障碍物在所述车辆的自动泊车行驶路线中时,对所述车辆的转弯角度进行调整并模拟调整后的自动泊车行驶路线,直至所述障碍物不在所述车辆的自动泊车行驶路线中。
38、进一步的,当所述图像处理单元确定所述障碍物在所述车辆的自动泊车行驶路线中且对所述自动泊车行驶路线进行调整后,根据转弯角度调整所述车辆的行驶速度,包括:
39、获取所述车辆的实时转弯角度θ0,计算所述实时转弯角度θ0与所述转弯角度θ1的角度差值δθ=|θ0-θ1|;预先设定第一预设差值δθ1、第二预设差值δθ2和第三预设差值δθ3,且δθ1<δθ2<δθ3;
40、根据所述实时转弯角度θ0与所述转弯角度θ1的角度差值δθ与各预设差值的大小关系,选取自动泊车行驶速度;
41、预先设定第一预设行驶速度b1、第二预设行驶速度b2和第三预设行驶速度b3,且b1<b2<b3;
42、当δθ1≤δθ<δθ2时,选取所述第三预设行驶速度b3作为所述车辆的自动泊车行驶速度;
43、当δθ2≤δθ<δθ3时,选取所述第二预设行驶速度b2作为所述车辆的自动泊车行驶速度;
44、当δθ1≤δθ<δθ2时,选取所述第一预设行驶速度b1作为所述车辆的自动泊车行驶速度。
45、与现有技术相比,本发明的有益效果在于:通过采集光线传感器信号检测车辆表面的阴影遮挡情况,有利于避免由于阴影遮挡而导致的图像失真和识别错误。通过比对实际距离与预设距离,可以评估障碍物与车辆的距离是否满足安全要求,避免了与障碍物发生碰撞,提高自动泊车的安全性。通过处理第一和第二阴影遮挡的位置,判断阴影位置是否发生变化。有利于快速识别车辆周围障碍物的移动情况,以及阴影遮挡是否稳定。通过检测阴影位置的变化,系统可以加快决策和调整速度。当图像处理单元确定阴影位置发生变化时,通过获取阴影位置的平均移动速度来判断障碍物是否可超越。有利于评估障碍物的移动趋势和速度,从而快速决定是否可以安全地超越障碍物。当图像处理单元确定阴影位置未发生变化时,判断是否需要调整车辆的自动泊车行驶路线。避免了与静止的障碍物发生碰撞,确保了车辆行驶路径的安全性和有效性。根据转弯角度选择适当的自动泊车行驶速度。有利于控制车辆的速度,使其适应不同的转弯角度,提高了自动泊车的准确性和平稳性。
46、另一方面,本技术还提供了一种基于车辆外观变化的自修正图像采集方法,包括:
47、s100:在车辆进行自动泊车时,采集光线传感器信号判定车辆表面是否存在阴影遮挡;
48、s200:当判定所述车辆表面存在阴影遮挡时,获取所述车辆与障碍物的最小距离,将所述最小距离与预设距离进行比对,根据比对结果判断所述障碍物是否处在安全距离;
49、s300:当确定所述车辆表面存在阴影遮挡且所述障碍物不在安全距离时,对车辆表面进行图像拍摄,获取所述车辆表面的第一阴影遮挡,经过第一预设时间后再次对所述车辆表面进行图像拍摄,获取所述车辆表面的第二阴影遮挡;
50、s400:在所述图像拍摄单元获取所述第一阴影遮挡和第二阴影遮挡后,对所述第一阴影遮挡和第二阴影遮挡进行处理,判定所述第一阴影遮挡中的阴影位置与第二阴影遮挡中的阴影位置是否发生变化;
51、当确定阴影位置发生变化时,获取所述阴影位置的平均移动速度,根据所述平均移动速度判定所述障碍物是否可超越;当确定所述障碍物可超越时,控制所述车辆以第一运行速度运行自动泊车动作,并获取地面摩擦系数,根据地面摩擦系数对所述第一运行速度进行调整;
52、当确定阴影位置未发生变化时,判断所述障碍物是否在所述车辆的自动泊车行驶路线中,根据判断结果确定是否调整所述车辆的自动泊车行驶路线;当确定所述障碍物在所述车辆的自动泊车行驶路线中且对所述自动泊车行驶路线进行调整后,根据转弯角度选取所述车辆的自动泊车行驶速度。
53、可以理解的是,上述基于车辆外观变化的自修正图像采集系统及方法具备相同的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!