融合泊车控制方法、装置、设备及存储介质与流程
本申请涉及智能驾驶,尤其涉及一种融合泊车控制方法、装置、设备及存储介质。
背景技术:
1、当前市场应用的融合泊车方案需要对环视摄像头及超声波雷达所采集的信息进行目标融合并经由规划决策处理最终输出横向、纵向控制请求至执行器端,以实现自动泊车。
2、然而,在舱泊一体方案中,系统级芯片(system on chip,soc)的处理效率及安全架构设计通常无法满足舱泊一体方案中辅助驾驶系统对于实时性和稳定性的要求,且系统级芯片soc的操作系统本身并未通过功能安全认证,无法提供可靠的感知融合目标,致使泊车安全度不够高。而具备功能安全的单片机芯片(microcontroller unit,mcu)的算力又无法支撑完整的自动泊车感知融合算法的需求。基于系统级芯片soc和单片机芯片mcu的特点,若要选用可满足舱泊一体方案需求的大算力且具备安全架构设计的系统级芯片soc或单片机芯片mcu,就需要付出更高的硬件及研发成本。
3、因此,亟需一种新的融合泊车控制方法,以解决上述问题。
技术实现思路
1、本申请提供一种融合泊车控制方法、装置、设备及存储介质,用以解决现有融合泊车方案的硬件成本高等问题。
2、第一方面,本申请提供一种融合泊车控制方法,所述方法应用于部署于自车上的单片机芯片,所述方法包括:
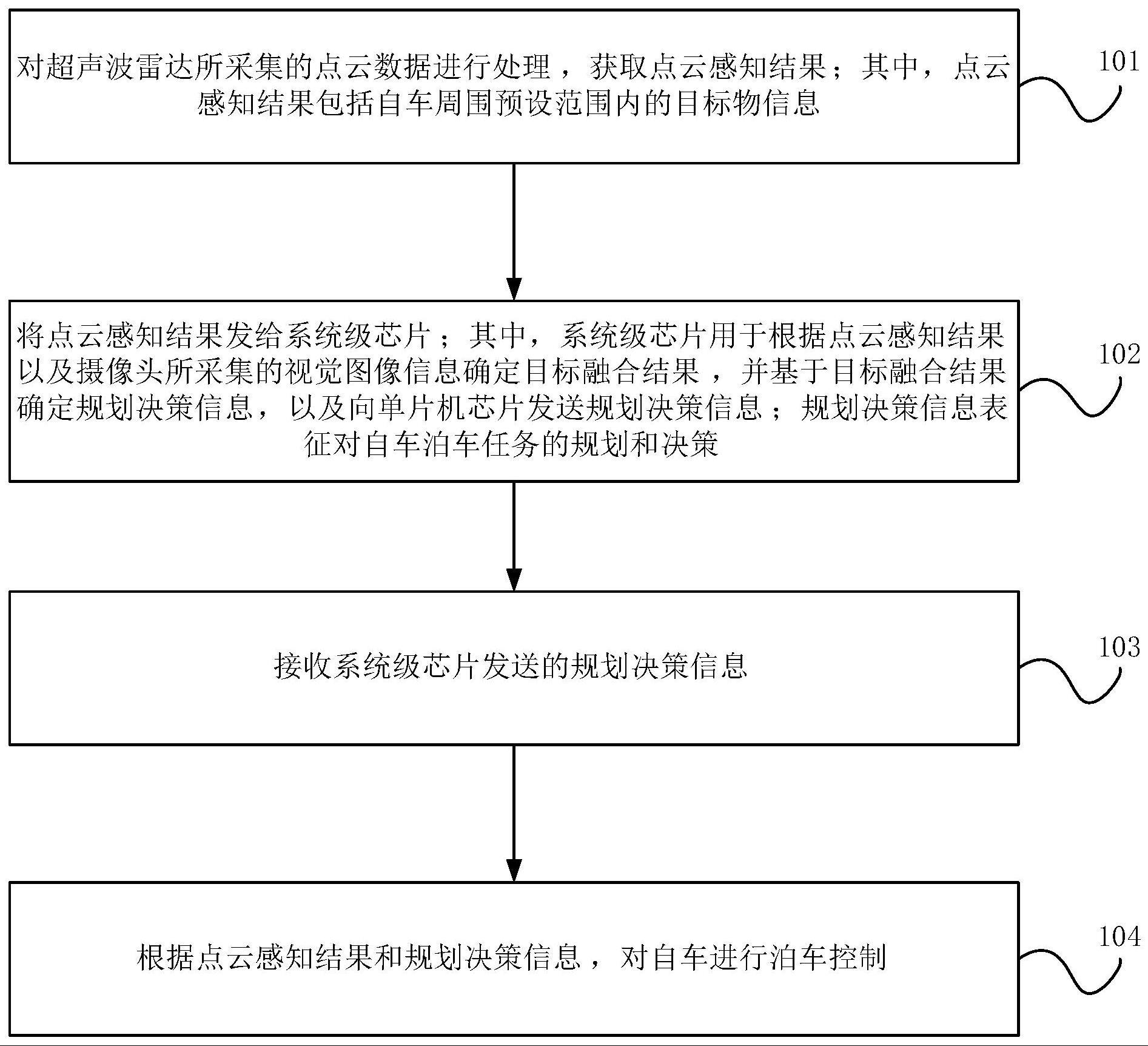
3、对超声波雷达所采集的点云数据进行处理,获取点云感知结果;其中,所述点云感知结果包括自车周围预设范围内的目标物信息;
4、将所述点云感知结果发给系统级芯片;其中,所述系统级芯片用于根据所述点云感知结果以及摄像头所采集的视觉图像信息确定目标融合结果,并基于所述目标融合结果确定规划决策信息,以及向所述单片机芯片发送所述规划决策信息;所述规划决策信息表征对自车泊车任务的规划和决策;
5、接收所述系统级芯片发送的规划决策信息;
6、根据所述点云感知结果和所述规划决策信息,对自车进行泊车控制。
7、可选地,所述根据所述点云感知结果和所述规划决策信息,对自车进行泊车控制,包括:
8、若基于所述点云感知结果,确定自车有碰撞风险,则生成并发送刹停请求信息;其中,所述刹停请求信息用于指示自车刹停;
9、若基于所述点云感知结果,确定自车无碰撞风险,则生成并发送泊车请求信息;其中,所述泊车请求信息用于指示自车基于所述规划决策信息泊车。
10、可选地,所述目标物信息包括自车与目标物的距离,所述基于所述点云感知结果,确定自车有碰撞风险,包括:
11、若确定所述自车与目标物的距离小于或等于预设距离,则确定自车有碰撞风险。
12、可选地,所述基于所述点云感知结果,确定自车无碰撞风险,包括:
13、若确定所述自车与目标物的距离大于所述预设距离,则确定自车无碰撞风险。
14、可选地,所述对超声波雷达所采集的点云数据进行处理,获取点云感知结果,包括:
15、将超声波雷达所采集的点云数据输入预先部署的点云检测模型中进行目标检测,确定所述点云检测模型的输出结果为所述点云感知结果;其中,所述点云检测模型是预先训练好的用于对所述点云数据进行目标检测的神经网络模型。
16、可选地,所述方法还包括:
17、持续监控所述系统级芯片,若确定所述系统级芯片异常,则生成刹停请求信息和/或报警信息;其中,所述刹停请求信息用于指示自车刹停,所述报警信息用于提醒驾驶员所述系统级芯片异常和/或用于指示驾驶员接管车辆。
18、可选地,所述规划决策信息包括泊车路径规划信息,所述泊车路径规划信息包括目标车位,所述目标车位具有标准位置信息,所述方法还包括:
19、获取执行完自车泊车任务时自车的泊车定位信息,确定所述泊车定位信息和所述标准位置信息的匹配度;
20、若确定所述匹配度大于或等于预设阈值,则确定泊车结束;
21、若确定所述匹配度小于所述预设阈值,则根据所述标准位置信息,修正自车的泊车位置。
22、第二方面,本申请提供一种融合泊车控制装置,所述装置应用于部署于自车上的单片机芯片,所述装置包括:
23、点云感知单元,用于对超声波雷达所采集的点云数据进行处理,获取点云感知结果;其中,所述点云感知结果包括自车周围预设范围内的目标物信息;
24、发送单元,用于将所述点云感知结果发给系统级芯片;其中,所述系统级芯片用于根据所述点云感知结果以及摄像头所采集的视觉图像信息确定目标融合结果,并基于所述目标融合结果确定规划决策信息,以及向所述单片机芯片发送所述规划决策信息;所述规划决策信息表征对自车泊车任务的规划和决策;
25、接收单元,用于接收所述系统级芯片发送的规划决策信息;
26、控制单元,用于根据所述点云感知结果和所述规划决策信息,对自车进行泊车控制。
27、第三方面,本申请提供一种电子设备,所述电子设备包括:处理器,以及与所述处理器通信连接的存储器;
28、所述存储器存储计算机执行指令;
29、所述处理器执行所述存储器存储的计算机执行指令,以实现如前所述的方法。
30、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如前所述的方法。
31、第五方面,本申请提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时用于实现如前所述的方法。
32、本申请提供的融合泊车控制方法、装置、设备及存储介质,应用于部署于自车上的单片机芯片,所述方法包括:对超声波雷达所采集的点云数据进行处理,获取点云感知结果;其中,所述点云感知结果包括自车周围预设范围内的目标物信息;将所述点云感知结果发给系统级芯片;其中,所述系统级芯片用于根据所述点云感知结果以及摄像头所采集的视觉图像信息确定目标融合结果,并基于所述目标融合结果确定规划决策信息,以及向所述单片机芯片发送所述规划决策信息;所述规划决策信息表征对自车泊车任务的规划和决策;接收所述系统级芯片发送的规划决策信息;根据所述点云感知结果和所述规划决策信息,对自车进行泊车控制。本申请的方案,将需要高算力的融合过程部署在系统级芯片soc中执行,通过符合功能安全的单片机芯片mcu基于点云感知结果对规划决策信息进行校验,充分发挥了系统级芯片soc的算力优势以及单片机芯片mcu的安全性、可靠性优势,在降低了硬件成本的同时,也提高了泊车安全。
技术特征:
1.一种融合泊车控制方法,其特征在于,所述方法应用于部署于自车上的单片机芯片,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述点云感知结果和所述规划决策信息,对自车进行泊车控制,包括:
3.根据权利要求2所述的方法,其特征在于,所述目标物信息包括自车与目标物的距离,所述基于所述点云感知结果,确定自车有碰撞风险,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述点云感知结果,确定自车无碰撞风险,包括:
5.根据权利要求1所述的方法,其特征在于,所述对超声波雷达所采集的点云数据进行处理,获取点云感知结果,包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1-5中任一项所述的方法,其特征在于,所述规划决策信息包括泊车路径规划信息,所述泊车路径规划信息包括目标车位,所述目标车位具有标准位置信息,所述方法还包括:
8.一种融合泊车控制装置,其特征在于,所述装置应用于部署于自车上的单片机芯片,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:处理器,以及与所述处理器通信连接的存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1-7中任一项所述的方法。
技术总结
本申请提供一种融合泊车控制方法、装置、设备及存储介质,涉及智能驾驶技术领域。该方法应用于部署于自车上的单片机芯片,方法包括:对超声波雷达所采集的点云数据进行处理,获取点云感知结果;其中,点云感知结果包括自车周围预设范围内的目标物信息;将点云感知结果发给系统级芯片;其中,系统级芯片用于根据点云感知结果以及摄像头所采集的视觉图像信息确定目标融合结果,并基于目标融合结果确定规划决策信息,以及向单片机芯片发送规划决策信息;规划决策信息表征对自车泊车任务的规划和决策;接收系统级芯片发送的规划决策信息;根据点云感知结果和规划决策信息,对自车进行泊车控制。本申请降低了硬件成本,也提高了泊车安全。
技术研发人员:吴昊,李齐丽,孙信威
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!