一种自适应人体参数的汽车智能座椅控制方法
本发明涉及一种控制方法,具体涉及一种自适应人体参数的汽车智能座椅控制方法,属于车辆控制。
背景技术:
1、汽车座椅在乘用车上承载驾驶员和其他乘客。当今汽车电动化、智能化的趋势愈演愈烈,然而,传统的座椅调节技术需要驾驶员手动调整确认,提供的人体适应性和舒适度不足。本发明旨在研发一种可以检测人体参数和身份信息并根据人体参数自适应调节汽车座椅的控制方法,可以自动根据驾驶者的身份信息或者身体信息调节汽车座椅,提升驾驶者的驾驶舒适度,为驾驶者的用车体验提供更好的服务。
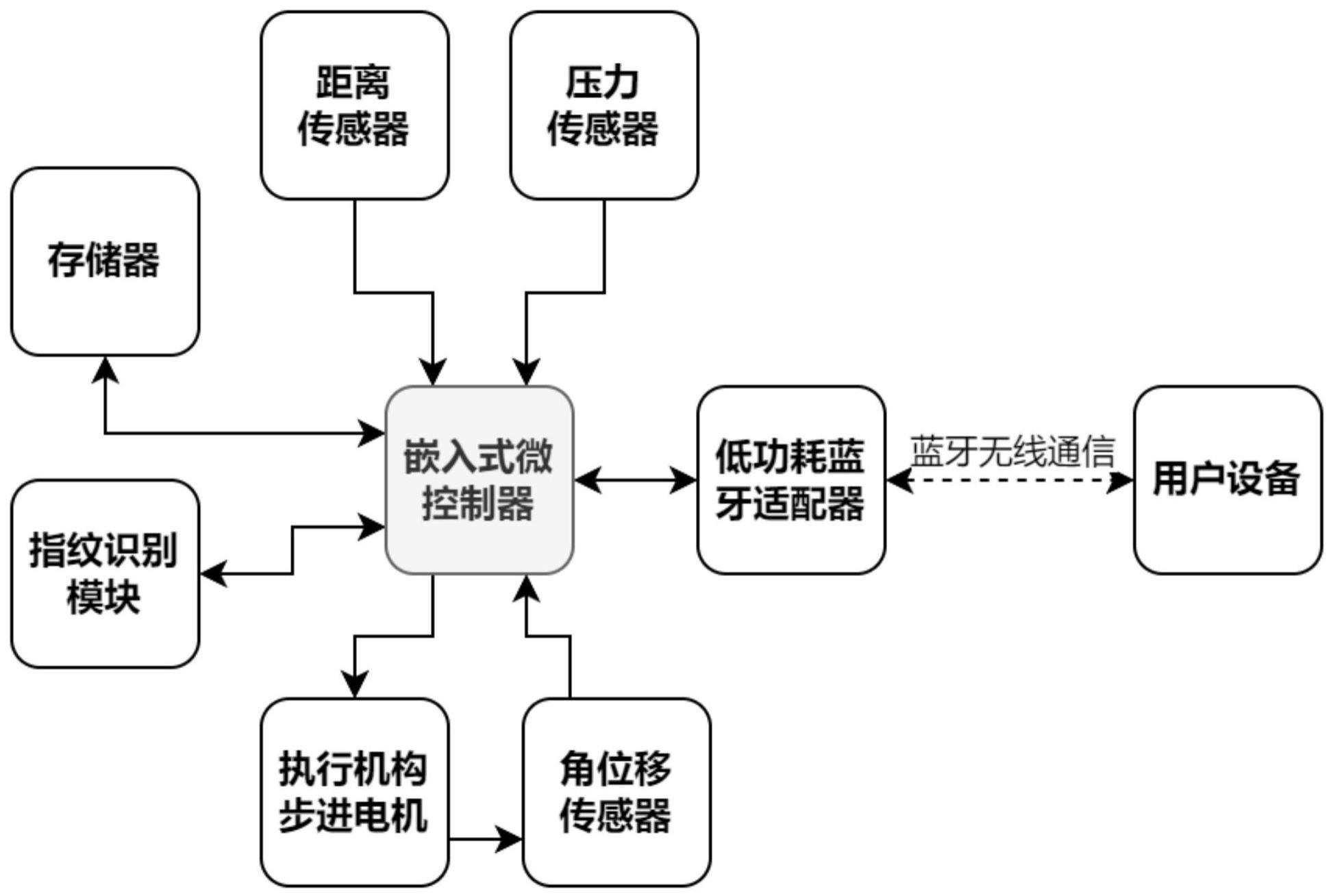
2、此系统可以作为一个车用ecu的子模块,提供座椅控制功能。车联网设备通常为总线系统,每一个子系统互相独立。一个嵌入式系统常常以嵌入式微处理器作为主控芯片,以此为核心,可以使用通信外设实现和上层系统的通讯和交互,并且将控制信号传达到执行机构。嵌入式微处理器具有低成本、低功耗、低体积、模块化等优点。通过在座舱中安装的传感器,可以从传感器获取乘坐人员相关信息,通过此类信息可以估计乘坐人员需要的座椅配置信息,从而向乘坐人员提供配置建议和使用建议。
技术实现思路
1、本发明针对现有实际应用中存在的不足,提供一种自适应人体参数的汽车智能座椅控制方法,通过此技术,可以通过检测人体参数和身份信息从而自动调节汽车座椅,同样可以通过交互式程序实现手动调节和信息显示,达到提升驾驶者的驾驶舒适性,提高驾驶者的用车体验的目的。
2、为了实现上述目的,本发明的技术方案如下:一种自适应人体参数的汽车智能座椅控制方法,此方法包含以下步骤:
3、步骤1:人员身份信息采集,具体如下:
4、步骤1.1:用户端指纹验证功能,
5、步骤1.2:用户端连接验证功能,
6、步骤2:人体参数检测和配置信息生成,具体如下:
7、步骤2.1:人体参数的采集和处理,
8、步骤2.2:根据人体参数自动生成配置信息,
9、步骤3:座椅配置加载。
10、其中,步骤1.1描述的用户端指纹验证功能包含以下步骤:
11、步骤1.1.1:根据指纹识别模块和单片机的连接,为单片机对应的通用输入输出接口设置模式,在座椅端初始化指纹识别模块,根据指纹识别模块对应的内存地址和其进行握手。当单片机从车用总线获取车辆解锁信号,且座椅椅面内的压力传感器达到阈值wth后,将向指纹识别模块发送控制字使指纹识别模块尝试读取指纹,在随后tscan秒内,如无输入指纹信息,则停止指纹识别模块读取。当读取的指纹信息和指纹识别模块内部存储的指纹信息匹配后,指纹识别模块向单片机发送识别得到的用户身份令牌信息tu。单片机根据此身份令牌信息,查询存储于单片机内部的用户配置信息。单片机的程序维护存储于指纹识别模块的令牌信息和单片机内部的座椅配置信息一一对应,则查询操作必定可以得到对应用户的座椅配置信息。根据此配置信息进入步骤3。
12、步骤1.1.2:用户可以在步骤1.2的用户端连接验证功能中,通过创建新的配置信息录入用户的指纹信息。在此步骤中,用户的手机将会通过蓝牙向连接到单片机的蓝牙适配器发送控制字,单片机接收到此控制字后将控制指纹识别模块开始录入用户的指纹信息。在用户的录入过程中,单片机将通过指纹识别模块侦测手指的功能,控制指纹识别模块多次读取用户的指纹,确保用户从指纹识别模块抬起手指后再次按下。在此步骤进行的同时,通过蓝牙适配器发送信息到手机提示用户改变手指在指纹识别模块放置的角度和方向,得到较为完整的指纹信息,从而提高将来指纹验证和搜索过程中的识别率。在录入完成后,单片机向用户手机发送录入完成信息,将在用户设备的界面上进行提示,同时要求用户的手机发送唯一设备标识符信息,将用户手机的唯一设备标识符经过散列算法后作为用户身份令牌信息。散列算法可以避免直接在单片机的eeprom中直接存储用户的唯一设备标识符,由于散列算法的不可逆性,避免潜在的隐私泄露的风险。考虑到用户的唯一设备标识符信息足够长,且在设计时已经考虑最小化碰撞风险,因此在单片机端直接将其作为散列函数的键值,不再添加额外的标识信息。
13、步骤1.2描述的用户端连接验证功能包含以下步骤:
14、步骤1.2.1:在用户的手机上获取设备的蓝牙适配器实例,通过此实例开启蓝牙低功耗设备扫描,用户在扫描获得的设备列表中,通过设备名称寻找并选择和单片机连接的蓝牙适配器。蓝牙设备的扫描和连接流程均设置最长运行时间,从而避免大量消耗用户设备的电量。成功寻找对应的蓝牙适配器后将遍历蓝牙适配器上的通用属性配置文件服务器中提供的服务,再遍历每一个服务中提供的特征字筛选用于实现通信的服务和服务特征字。手机将通过此服务特征字实现和单片机端的通信任务。
15、步骤1.2.2:用户可以通过手机端的按钮远程手动调节座椅的前后和俯仰角度。单片机通过步骤1.3中的位移传感器和位置记录功能,可以将座椅的位置状态和手机端的呈现同步,通过视觉反馈使通知用户调整已经达到限位。此功能同样可以同步座椅内置的调节拨杆和用户手机端的呈现。
16、步骤1.2.3:用户通过手机端实现用户管理功能。此功能可以通过手机向单片机端发送控制字,从而在单片机上添加和删除存储在单片机端的用户配置信息和存储在指纹识别模块的用户身份信息。在此界面时用户端先向单片机发送控制字,要求单片机发送用户名称列表。用户可以选择删除设备名称列表中的设备,以及添加当前设备为新用户信息,进入步骤1.1.2。
17、步骤1.2.4:用户可以通过手机向单片机发送识别信息,从而跳过指纹识别步骤,直接进入步骤3加载座椅配置信息。通过手机端向单片机端发送保存控制命令,可以在步骤1.2.2完成调节后覆盖已有的用户配置文件。
18、步骤2描述的人体参数检测和配置信息生成包含以下步骤:
19、步骤2.1:人体参数的采集和处理,通过座椅椅面和椅背内置的压力传感器估计用户的体重和身材信息,使用应变式压力传感器,当传感器放置的表面受力时,应变片上的导体金属由于受拉和受压造成电阻值的变化。从而输出差分式的压力信号,将压力信号接入微控制器的模数转换器后,通过一个低通数字滤波器降低抖动,再将滤波器的输出信号通过线性算术映射转换为可计量的压力值。通过安装在座椅正上方的超声波距离传感器,可以通过超声波的回波法检测驾驶员的身高信息,同样通过一个低通数字滤波器降低抖动,此数字滤波器使用相同的权重,从功能来看,此滤波器完成对输入信号取滑动平均计算的功能,再将结果通过线性算术映射转换为估计的驾驶人员的上半身高度。使用的数字滤波器均为有限长响应数字滤波器从而确保滤波器的稳定性,限制数字滤波器的阶数,使得滤波器所带来的群延迟远远小于乘员进行调节的频率和乘员在车内的运动频率,此时数字滤波器可以保证输出信号不会导致频率混叠现象的发生。
20、步骤2.2根据人体参数自动生成配置信息。根据通过传感器采样数据估计的驾驶人员对座椅靠背和坐垫压力,可以估计执行机构动作时的负载大小。微控制器将根据靠背和坐垫的压力值估计靠背的倾角位置系数和水平唯一位置系数,其目标是在确保乘员拥有充分视角的前提之下,为驾驶员提供合理的座椅位置,使得驾驶员可以舒适地操作方向盘。根据超声波距离传感器获得的乘员上半身高度估计值,调节座椅底座,使得乘员的视线位于车辆挡风玻璃中部。
21、步骤3描述的座椅配置加载包含以下步骤:
22、步骤3.1:根据步骤2.1中和单片机连接的传感器获取的信息,和步骤2.2中估计的负载大小,选择不同的方式驱动步进电机。当负载最轻时,通过位移传感器获取步进电机当前的角位移信息θ。将原先的脉冲串控制信号通过低通滤波器整形成平滑变化的信号,此信号将作为转速给定信号ω*。此时将步进电机视作两相同步电机,根据转速给定信号和角位移,使用dq变换t(pθ)将给定的转速信号变换为a相和b相的电压信号。其中q相始终设置为0,即vq=0,d相的电压大小与转速给定信号ω*正相关,即vd=kω*,其中的参数k为驱动电路的放大系数。此时步进电机将平滑运行,运行时具有三种模式中最小的噪声和抖动,提升调节的舒适程度。实现dq变换将d相和q相信号变换到a相和b相的方法如下:
23、vdq=t(pθ)vab
24、
25、其中p为转子的极对数,此参数由步进电机的结构唯一确定。
26、步骤3.2:根据步骤2.2估计的负载大小,当负载中等时,将一个脉冲信号分为多步执行。a相和b相的电压根据步数按正弦规律变化,并且二者的信号始终相差π/2角度。在此情况下,需要单片机同步提高控制脉冲信号的输出频率fc以实现相同的转速。为了降低电机启动和停转时的噪声,脉冲信号的输出频率在启动和停止时将以双曲正切函数fc(t)=tanh(mt-t0)的变化规律过渡,从而降低启动和停止时的噪声大小,其中偏移时间t0决定电机启动时的初始输出频率,缩放系数m决定启动和停转的过渡时间,上述两个参数可以通过实验确定。此时电机可以带动更大的负载,并且多步调节可以有效降低运行噪音大小。多步调节的a相和b相电压如下,其中v为驱动电路的最大输出电压值,l为接收一个脉冲信号后多步执行的机械角位移。
27、
28、步骤3.3:根据步骤2.2估计的负载大小,当负载较大时,将启用一般的步进电机控制方式。此时交替使用单相供电和双相供电功能。降低单个脉冲后电机将会转过的角度,从而在输出较大扭矩的同时控制电机的旋转角度,从而提高座椅控制的位置精度。在此模式下,电机的启动过程和停转过程都使用动态变化的输出频率,使用和步骤3.2相同的方式,利用双曲正切函数对输出频率进行平滑过渡,从而降低电机启动和停止时的顿挫感。
29、相比于现有的技术和解决方案,本发明具有以下优点:
30、1.本发明使用集成于座椅内部的压力传感器以及集成入车顶的距离传感器实现对于乘员对于座椅靠背和坐垫压力的估计,以及乘员上半身高度的估计,避免使用需要高数据处理能力,且容易受到光照条件影响的图像传感器,可以降低微处理器的算力要求,有效地控制成本;
31、2.本发明使用步进电机作为位置控制器,步进电机可以实现开环的位置控制功能,相比于伺服运动控制系统,其不需要电流传感器即可实现在本应用场景中足够平滑和高精度的位置调节功能。降低元器件的数量可以简化系统组成,从而降低系统的故障率;
32、3.本发明可以通过距离传感器和压力传感器自动生成座椅的配置文件,无需用户的参与即可将汽车座椅调节到较佳的状态。用户在调节完成后亦可继续手动完善配置的调节;
33、4.本发明可以根据传感器估计的负载大小信息,自动选择合适的电机驱动方式,从而在满足座椅调节速度的同时有效降低电机控制系统的噪音和抖动,改善人机关系,提升用户体验。
- 还没有人留言评论。精彩留言会获得点赞!