真空电子控制器异常预警控制系统的制作方法
本发明涉及车载部件监控,具体为真空电子控制器异常预警控制系统。
背景技术:
1、真空泵控制器是工业生产中常用的设备,用于控制和监测真空泵的运行状态,广泛用于电动汽车、柴油车与缸内直喷汽油车的真空泵助力制动系统,以便于增加刹车踏板的制动力度,帮助驾驶人员完成车辆的减速和制动。然而,由于各种原因,真空泵控制器可能会出现异常情况,例如过载、过热、电源故障等,这些异常情况可能导致设备损坏,甚至引发事故。
2、现有的真空泵控制器基本内设有自动检测逻辑,例如温度检测、压力检测以及真空泵工作时限和压力阈值的限制,但是这些参数在不同的地域或者使用环境下并不一定能够完全匹配当时的运用场景,导致使用效率下降或者容易出现故障。为此,我们提供一种真空电子控制器异常预警控制系统。
技术实现思路
1、本发明的目的在于提供了真空电子控制器异常预警控制系统。
2、本发明所解决的技术问题为:
3、(1)如何通过记录测试各不同海拔对应的相对真空度不同,并关联实际所需踩踏力,在保证踩踏力一致的情况下,对真空泵设定的工作压强阈值进行迁移设置,补足相对真空度不足导致的踏板发硬的问题,解决现有技术中汽车在不同海拔高度行驶时刹车脚感会产生变化的问题;
4、(2)如何通过对真空电子控制器所处工作环境进行分析,记录在非常态环境中工作时长以及各非正常状态单次持续时长,对真空电子控制器的检修时间进行修正,解决现有技术中依靠定期保养检修而存在故障风险和安全隐患的问题;
5、(3)如何通过将车辆振动与真空电子控制器的电路稳定性进行关联,并依据振动测试结果构建振动等级与电流电压波动值之间的关系,从而可以修正得到汽车行驶过程中真空电子控制器的电路真实稳定性,从而为后续自动介入预警模块的处理提供精准预警和处理空间,解决现有技术中电路不稳且缺乏监控导致意外情况无法处理的问题。
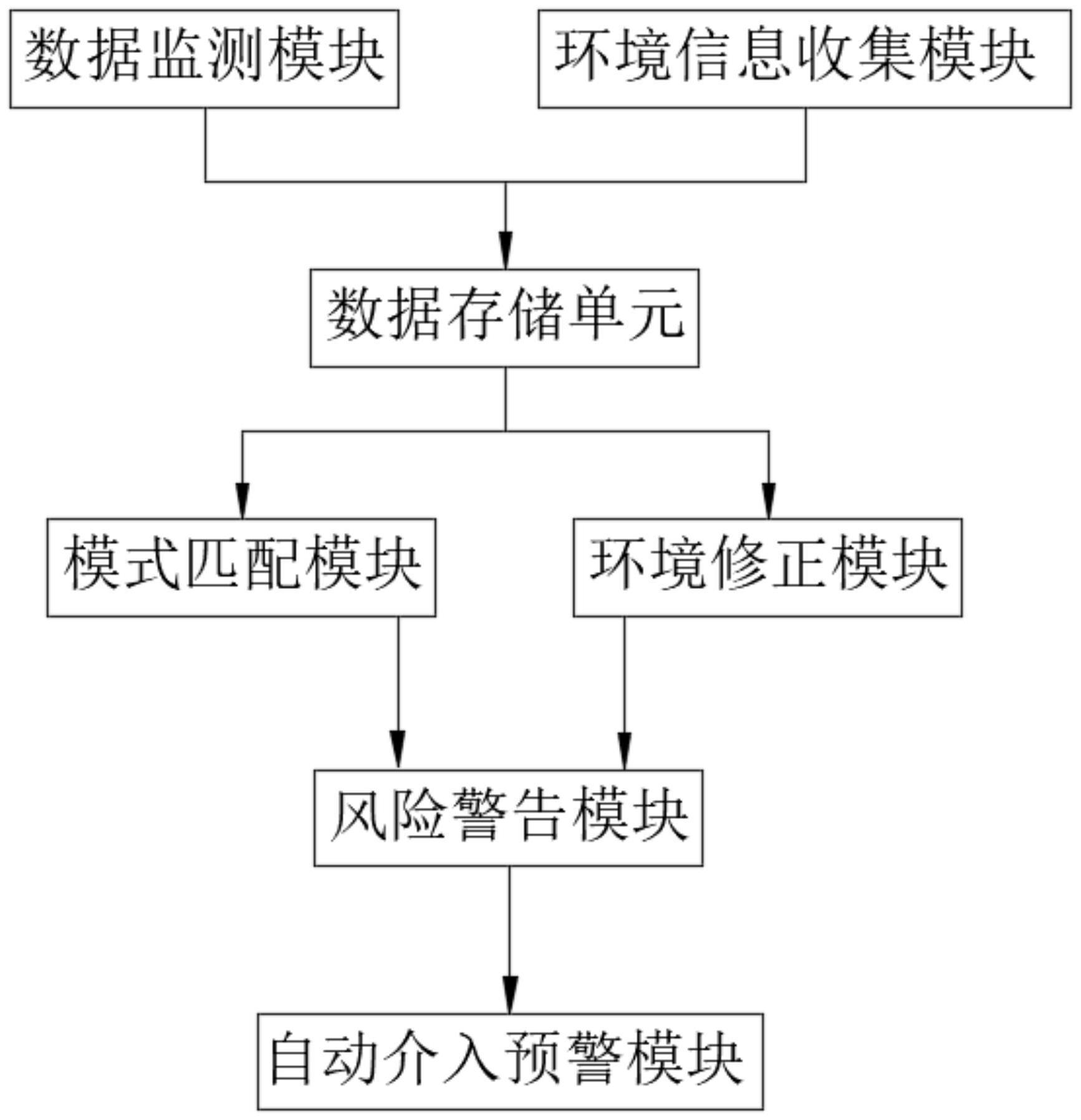
6、本发明可以通过以下技术方案实现:真空电子控制器异常预警控制系统,包括对真空自动辅助系统进行内部数据检测的数据监测模块和对环境数据进行收集的环境信息收集模块,该控制系统还包括:
7、模式匹配模块,所述模式匹配模块根据踏板压力值启动模式分析匹配,通过不同海拔高度的气压数据获取需真空泵提供助力的相对真空度,建立不同海拔上相对真空度匹配映射函数,从而对真空泵设定的工作压强阈值进行滑移;
8、环境修正模块根据真空电子控制器所处的工作温度和湿度进行区间比对,从而判断过热、过冷或过湿状态的对应时长,并记录其三种状态单次持续时长超出对应阈值的次数,依据上述数据对检修周期进行修正并发送至风险警告模块,风险警告模块在检修周期到达时进行警告提醒。
9、本发明的进一步技术改进在于:风险警告模块还根据获取的实时电压值和实时电流值生成对应曲线并得出在每一个工作周期或准备过程中的波动值;
10、同时,利用振动加速度传感器获取车辆行驶过程中振动情况,根据振动情况和振动测试结果对波动值进行修正,并对修正后的波动值判断电路是否稳定。
11、本发明的进一步技术改进在于:对波动值进行修正且判断所述电路是否稳定的方式具体包括:根据振动频率、振动幅度和振动加速度确定振动等级并匹配修正系数,从而对电流和电压的波动值进行修正,利用修正后的数据重构实时电压—时间曲线和实时电流—时间曲线,该两条曲线的对应波动值若超出设定阈值且持续一定时间,则认定电路不稳定,生成电路失稳信号,其中修正系数是通过振动测试与电路波动值的对应关系拟合得出的。
12、本发明的进一步技术改进在于:风险警告模块获取真空罐的实时压力值,对比当前制动周期内或两个制动周期之间的准备过程中真空罐内部实时压力值,当实时压力值与工作压强阈值相吻合时,则判定真空泵不存在泄露风险,当出现实时压力值与工作压强阈值的比值低于一定值时或者在真空辅助制动系统工作的持续运转时限内,真空泵压力罐中始终无法达到对应真空度,认定真空泵存在泄露风险,此时生成泄露风险信号。
13、本发明的进一步技术改进在于:电路失稳信号发送至自主介入预警模块,自主介入预警模块主动提示车辆停车检修,且主动请示降速至一定速度,降低车辆的振动频率和浮动,减轻电压电流波动。
14、本发明的进一步技术改进在于:泄露风险信号发送至自主介入预警模块,自主介入预警模块通过车机系统提示车辆减速停车,同时,计算泄露速度以及真空泵正常工作时压力罐中真空度不会低于最低工作阈值的时间,将该时间显示在车机系统内,同时主动介入,在真空泵处于温度监控下突破持续工作时限,减缓压力罐内真空度的损失速度。
15、本发明的进一步技术改进在于:检修周期的修正计算过程具体如下:
16、计算过热时长、过冷时长以及过湿时长所占该检修周期内的时长占比,其结果分别标记为wp1、wp2、sp;
17、环境修正模块内还设有对上述过热、过冷和过湿状态的持续工作时长阈值,记录在该检修周期内上述三种状态单次持续时长超过对应的阈值的次数,分别标记为n1、n2、n3;
18、则根据上述数据,对检修周期进行修正,将上述数据代入到公式:
19、中,得到修正后的检修周期tx;
20、其中,t表示现有的设定检修周期,e为数学中的自然常数,θ为取值范围在中一个定值。
21、与现有技术相比,本发明具备以下有益效果:
22、1、通过记录测试各不同海拔对应的相对真空度不同,并关联实际所需踩踏力,在保证踩踏力一致的情况下,对真空泵设定的工作压强阈值进行迁移设置,补足相对真空度不足导致的踏板发硬的问题,从而保证在不同海拔的驾驶体验中,脚步对制动踏板的感知力和踩踏力保持同步,提升体验感,同时降低驾驶员对制动过程估计不足的风险。
23、2、通过对真空电子控制器所处工作环境进行分析,记录在非常态环境中工作时长以及各非正常状态单次持续时长,对真空电子控制器的检修时间进行修正,排除仅依靠定期保养检修而存在故障风险和安全隐患的问题;
24、3、通过将车辆振动与真空电子控制器的电路稳定性进行关联,并依据振动测试结果构建振动等级与电流电压波动值之间的关系,从而可以修正得到汽车行驶过程中真空电子控制器的电路真实稳定性,从而为后续自动介入预警模块的处理提供精准预警和处理空间,解决现有技术中电路不稳且缺乏监控导致意外情况无法处理的问题。
技术特征:
1.真空电子控制器异常预警控制系统,包括对真空自动辅助系统进行内部数据检测的数据监测模块和对环境数据进行收集的环境信息收集模块,其特征在于,该控制系统还包括:
2.根据权利要求1所述的真空电子控制器异常预警控制系统,其特征在于,所述风险警告模块还根据获取的实时电压值和实时电流值生成对应曲线并得出在每一个工作周期或准备过程中的波动值;
3.根据权利要求2所述的真空电子控制器异常预警控制系统,其特征在于,对波动值进行修正且判断所述电路是否稳定的方式具体包括:根据振动频率、振动幅度和振动加速度确定振动等级并匹配修正系数,从而对电流和电压的波动值进行修正,利用修正后的数据重构实时电压—时间曲线和实时电流—时间曲线,该两条曲线的对应波动值若超出设定阈值且持续一定时间,则认定电路不稳定,生成电路失稳信号,其中修正系数是通过振动测试与电路波动值的对应关系拟合得出的。
4.根据权利要求1所述的真空电子控制器异常预警控制系统,其特征在于,所述风险警告模块获取真空罐的实时压力值,对比当前制动周期内或两个制动周期之间的准备过程中真空罐内部实时压力值,当实时压力值与工作压强阈值相吻合时,则判定真空泵不存在泄露风险,当出现实时压力值与工作压强阈值的比值低于一定值时或者在真空辅助制动系统工作的持续运转时限内,真空泵压力罐中始终无法达到对应真空度,认定真空泵存在泄露风险,此时生成泄露风险信号。
5.根据权利要求3所述的真空电子控制器异常预警控制系统,其特征在于,所述电路失稳信号发送至自主介入预警模块,自主介入预警模块主动提示车辆停车检修,且主动请示降速至一定速度,降低车辆的振动频率和浮动,减轻电压电流波动。
6.根据权利要求4所述的真空电子控制器异常预警控制系统,其特征在于,所述泄露风险信号发送至自主介入预警模块,自主介入预警模块通过车机系统提示车辆减速停车,同时,计算泄露速度以及真空泵正常工作时压力罐中真空度不会低于最低工作阈值的时间,将该时间显示在车机系统内,同时主动介入,在真空泵处于温度监控下突破持续工作时限,减缓压力罐内真空度的损失速度。
7.根据权利要求1所述的真空电子控制器异常预警控制系统,其特征在于,所述检修周期的修正计算过程具体如下:
技术总结
本发明公开了真空电子控制器异常预警控制系统,涉及车载部件监控技术领域;该控制系统包括模式匹配模块、环境修正模块、风险警告模块、自主介入预警模块和数据存储单元;通过记录测试各不同海拔对应的相对真空度,关联实际所需踩踏力,在保证踩踏力一致的情况下,对真空泵设定的工作压强阈值进行迁移设置,补足相对真空度不足导致的踏板发硬的问题;通过对真空电子控制器所处工作环境进行分析,记录在非常态环境中工作时长以及各非正常状态单次持续时长,对真空电子控制器的检修时间进行修正,排除仅依靠定期保养检修而存在安全隐患的问题,整个系统增强了驾驶员的驾驶体验,且降低了突发的故障风险,同时可以主动介入进行一些紧急处理措施。
技术研发人员:吴志伟,吴宏亮,孙海峰
受保护的技术使用者:黄山宏伟电气科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!