车辆控制方法、装置、电子设备及存储介质与流程
本公开涉及无人驾驶,尤其涉及车辆控制方法、装置、电子设备及存储介质。
背景技术:
1、在矿山场景等场景中,由于行驶道路条件比较复杂,对于无人驾驶矿用车辆而言,会经常出现在不同坡道起步的情况。由于一般矿用车辆底盘的驻车系统为用气制动,不具备坡道驻车功能。因此,在车辆起步时,如果先松开驻车再进行油门控制,或者在坡道上起步时借助制动和驻车的配合,这两种方式在车辆起步时均存在溜坡的风险,进而不能很好的保证矿用车辆的作业安全。
技术实现思路
1、本公开提供了一种车辆控制方法、装置、电子设备及存储介质。
2、根据本公开的第一方面,提供了一种车辆控制方法,所述方法包括:
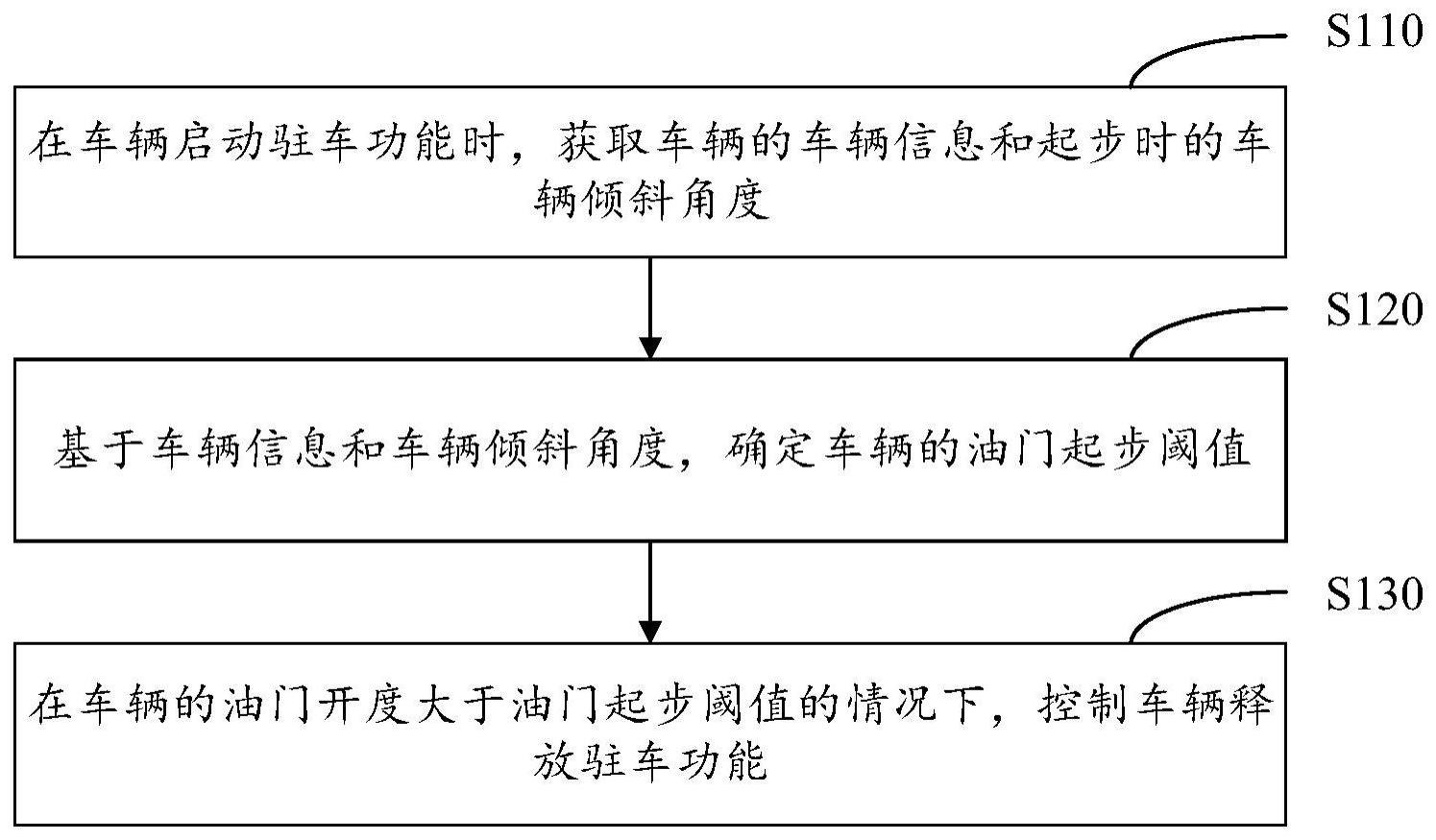
3、在车辆启动驻车功能时,获取所述车辆的车辆信息和起步时的车辆倾斜角度;
4、基于所述车辆信息和所述车辆倾斜角度,确定所述车辆的油门起步阈值;
5、在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能。
6、根据本公开的第二方面,提供了一种车辆控制装置,所述装置包括:
7、车辆数据获取模块,用于在车辆启动驻车功能时,获取所述车辆的车辆信息和起步时的车辆倾斜角度;
8、油门起步阈值确定模块,用于基于所述车辆信息和所述车辆倾斜角度,确定所述车辆的油门起步阈值;
9、驻车功能释放模块,用于在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能。
10、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如以上所述的方法。
11、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本公开的上述方法。
12、本公开实施例提供的车辆控制方法、装置、电子设备及存储介质,在车辆启动驻车功能时,通过获取车辆的车辆信息和起步时的车辆倾斜角度,并基于该车辆信息和该车辆倾斜角度,确定出车辆的油门起步阈值。这样在车辆的油门开度大于油门起步阈值的情况下,可以控制车辆释放驻车功能。由于车辆在释放驻车功能时,车辆的油门开度大于油门起步阈值,进而可以避免车辆出现溜坡的危险。
技术特征:
1.一种车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述车辆信息和所述车辆倾斜角度,确定所述车辆的油门起步阈值,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述基于所述车辆信息和所述车辆倾斜角度,确定所述车辆的油门起步阈值,包括:
4.根据权利要求3所述的方法,其特征在于,所述在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能,包括:
5.根据权利要求3所述的方法,其特征在于,所述在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能,包括:
6.根据权利要求3所述的方法,其特征在于,所述在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能,包括:
7.根据权利要求3所述的方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种车辆控制装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,包括:
11.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1-8中任一项所述的方法。
技术总结
本公开涉及车辆控制方法、装置、电子设备及存储介质,其方法包括:在车辆启动驻车功能时,获取所述车辆的车辆信息和起步时的车辆倾斜角度;基于所述车辆信息和所述车辆倾斜角度,确定所述车辆的油门起步阈值;在所述车辆的油门开度大于所述油门起步阈值的情况下,控制所述车辆释放所述驻车功能。由于车辆在释放驻车功能时,车辆的油门开度大于油门起步阈值,进而可以避免车辆出现溜坡的危险。
技术研发人员:周立岩
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!