机动车辆的自清洁传感器系统的制作方法
本公开涉及一种具有一个或多个对象传感器的机动车辆,更具体地,涉及一种机动车辆的自清洁传感器系统,包括具有镜片表面的对象传感器和用于去除形成在镜片表面上的模糊物的镜片处理装置。
背景技术:
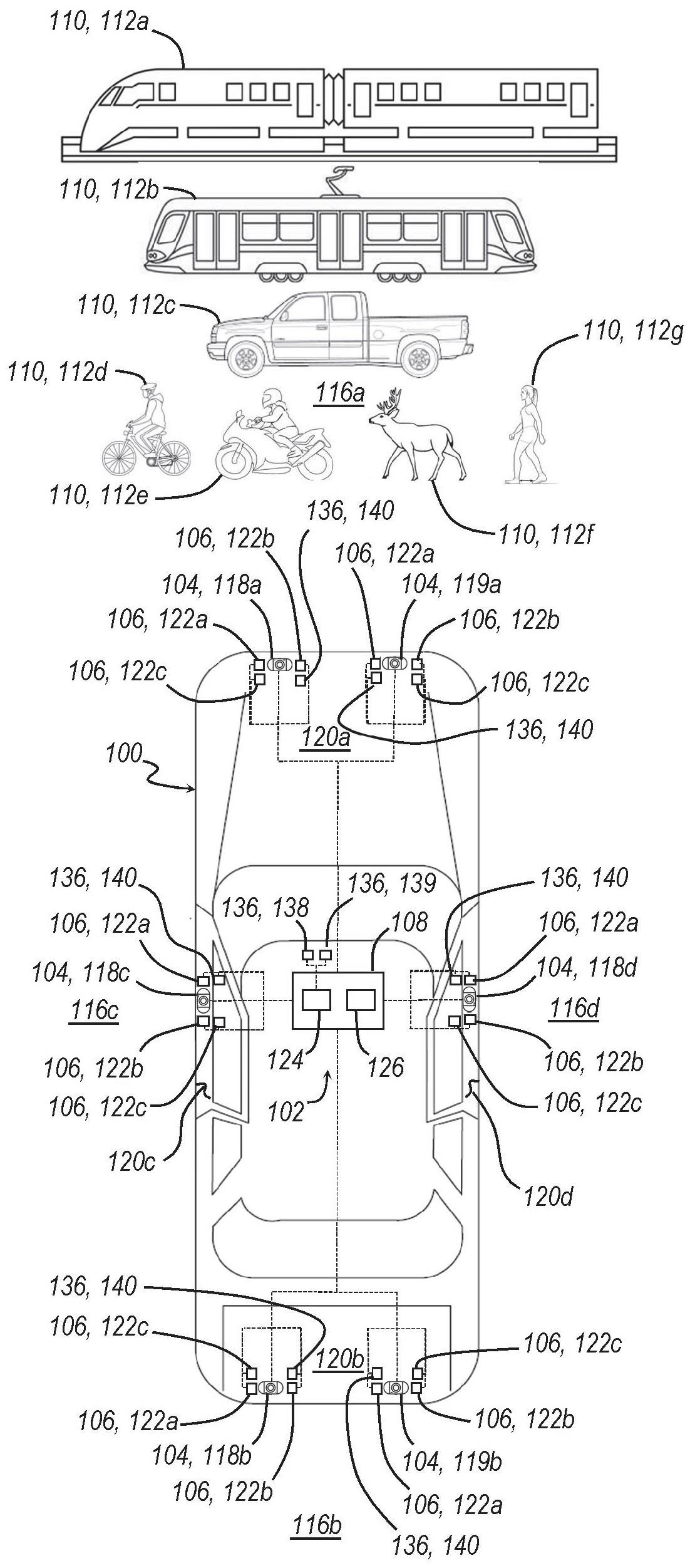
1、汽车系统可包括一个或多个对象传感器,以帮助驾驶员操作车辆或者以便完全操作车辆。例如,高级驾驶员辅助系统(adas)典型地包括一个或多个相机形式的多个对象传感器,用于捕获位于车辆外部的相关联区域的图像。相机可用于确定对象相对于车辆位置的存在。更具体地,相机可用于确定沿道路的建筑物和树木的存在、车辆的速度、车辆在道路上的位置(即,车道保持)以及其他车辆、行人或其他可能移动靠近或远离车辆的对象的位置。
2、相机可暴露于环境中,不可预测的恶劣天气条件会严重损害相机的性能。与硬件故障相比,恶劣天气造成的损害可能难以预测和检测。来自受损传感器的图像可能导致下游处理模块的错误检测。受损区域中出现的对象可能会被遗漏,并且车辆系统可能会错误地将受损区域本身识别为错误对象。
3、因此,尽管现有方法和系统可实现其预期目的,但是需要一种解决这些问题的方法和自清洁传感器系统。
技术实现思路
1、根据本公开的若干个方面,机动车辆的自清洁传感器系统包括多个对象传感器,其中每个对象传感器具有面向位于机动车辆外部的多个区域中的相关联一个的镜片表面。每个对象传感器生成与由对象传感器捕获的相关联区域的图像和/或视频相关联的信号。该系统进一步包括多个镜片处理装置,用于将多种补救剂中的相关联一种施加到每个对象传感器的镜片表面。补救剂彼此不同,并且每种补救剂被配置为去除形成在相关联对象传感器的镜片表面上的相关联分类的模糊物。该系统进一步包括计算机,该计算机包括与对象传感器和镜片处理装置电通信的一个或多个处理器。该计算机进一步包括存储指令的非暂时性计算机可读存储介质。处理器被编程为响应于处理器从对象传感器接收到信号而利用多任务神经网络来确定模糊物的分类。处理器进一步被编程为基于模糊物的分类生成致动信号。处理器进一步被编程为将致动信号传输到相关联镜片处理装置。相关联镜片处理装置响应于相关联镜片处理装置从处理器接收到致动信号而将相关联补救剂施加到镜片表面。
2、在一个方面,镜片处理装置包括基于热量的镜片处理装置,用于将热量施加到镜片表面以去除形成在相关联对象传感器的镜片表面上的模糊物。
3、在另一方面,处理器进一步被编程为响应于处理器从对象传感器接收到信号而确定模糊物的分类与形成在镜片表面上的冰沉积物相关联。
4、在另一方面,镜片处理装置包括基于液体的镜片处理装置,用于将加压液体递送到镜片表面以去除形成在相关联对象传感器的镜片表面上的模糊物。
5、在另一方面,处理器进一步被编程为响应于处理器从对象传感器接收到信号而确定模糊物的分类与形成在镜片表面上的污垢沉积物相关联。
6、另一方面,镜片处理装置包括基于气体的镜片处理装置,用于将压缩气体递送到镜片表面以去除形成在相关联对象传感器的镜片表面上的模糊物。
7、在另一方面,处理器进一步被编程为响应于处理器从对象传感器接收到信号而确定模糊物的分类与形成在镜片表面上的液体沉积物相关联。
8、在另一方面,处理器进一步被编程为在镜片处理装置将相关联补救剂施加到镜片表面之后,确定模糊物的至少一部分设置在镜片表面上。处理器进一步被编程为对去除模糊物所做出的尝试次数进行计数,并且将尝试次数与最大阈值进行比较。处理器进一步被编程为响应于处理器确定尝试次数低于最大阈值而生成致动信号。相关联镜片处理装置响应于相关联镜片处理装置从处理器接收到致动信号而将相关联补救剂施加到镜片表面。
9、根据本公开的若干个方面,机动车辆的自清洁传感器系统包括多个对象传感器,该多个对象传感器具有面向位于机动车辆外部的多个区域中的相关联一个的镜片表面。每个对象传感器生成与由对象传感器捕获的相关联区域的图像和/或视频相关联的对象信号。该系统进一步包括多个镜片处理装置,用于将多种补救剂中的相关联一种施加到每个对象传感器的镜片表面。补救剂彼此不同,并且每种补救剂被配置为去除形成在相关联对象传感器的镜片表面上的模糊物的相关联分类。镜片处理装置包括一级镜片处理装置,用于将一级补救剂施加到镜片表面以去除模糊物的一级分类。该系统进一步包括计算机,该计算机具有与对象传感器和镜片处理装置电通信的一个或多个处理器。该计算机进一步包括存储指令的非暂时性计算机可读存储介质。处理器被编程为响应于处理器从对象传感器接收到对象信号而利用多任务神经网络来确定模糊物的一级分类。处理器被编程为基于模糊物的一级分类生成一级致动信号。处理器被编程为将一级致动信号传输到一级镜片处理装置。一级镜片处理装置响应于一级镜片处理装置从处理器接收到一级致动信号而将一级补救剂施加到镜片表面。
10、在一个方面,处理器进一步被编程为在一级镜片处理装置将一级补救剂施加到镜片表面之后,确定模糊物的至少一部分仍然设置在镜片表面上。处理器进一步被编程为对去除模糊物所做出的尝试次数进行计数,并且将尝试次数与最大阈值进行比较。处理器进一步被编程为响应于处理器确定尝试次数低于最大阈值并且处理器进一步确定一级补救剂未去除整个模糊物而确定模糊物的二级分类。处理器进一步被编程为基于二级分类生成二级致动信号。镜片处理装置进一步包括二级镜片处理装置,用于响应于二级镜片处理装置从处理器接收到二级致动信号而将二级补救剂施加到镜片表面。
11、在另一方面,处理器进一步被编程为在二级镜片处理装置将二级补救剂施加到镜片表面之后,确定模糊物的至少一部分仍然设置在镜片表面上。处理器进一步被编程为对去除模糊物所做出的尝试次数进行计数,并且将尝试次数与最大阈值进行比较。处理器进一步被编程为响应于处理器确定尝试次数低于最大阈值并且处理器进一步确定二级补救剂未去除整个模糊物而确定模糊物的三级分类。处理器进一步被编程为基于三级分类生成三级致动信号。镜片处理装置进一步包括三级镜片处理装置,用于响应于三级镜片处理装置从处理器接收到三级致动信号而将三级补救剂施加到镜片表面。
12、另一方面,该系统进一步包括一个或多个补充传感器,用于生成与模糊物相关联的补充信号,其中处理器基于补充信号确定一级分类、二级分类和三级分类的准确度。
13、另一方面,补充传感器包括用于生成指示环境温度的温度信号的温度传感器。模糊物的一级分类、二级分类和三级分类中的一种与形成在镜片表面上的冰沉积物相关联。处理器响应于指示环境温度高于冰点温度的温度信号而确定分类不准确。
14、在另一方面,一级镜片处理装置、二级镜片处理装置和三级镜片处理装置是用于将压缩气体递送到镜片表面的基于气体的镜片处理装置、用于将加压液体递送到镜片表面的基于液体的镜片处理装置和用于将热量施加到镜片表面以去除形成在相关联对象传感器的镜片表面上的模糊物的基于热量的镜片处理装置中的相关联一种。
15、根据本公开的若干个方面,提供了一种用于操作机动车辆的自清洁传感器系统的方法。该系统包括多个对象传感器,每个对象传感器具有面向位于机动车辆外部的多个区域中的相关联一个的镜片表面。该系统进一步包括多个镜片处理装置,该多个镜片处理装置包括一级镜片处理装置、二级镜片处理装置和三级镜片处理装置。该系统进一步包括一个或多个补充传感器和具有一个或多个处理器和存储指令的非暂时性计算机可读存储介质的计算机。该方法包括使用对象传感器生成与由对象传感器捕获的区域的图像和/或视频相关联的对象信号。该方法进一步包括响应于处理器从对象传感器接收到对象信号而使用处理器确定模糊物的一级分类。该方法进一步包括使用处理器基于模糊物的一级分类生成一级致动信号。该方法进一步包括使用处理器将一级致动信号传输到一级镜片处理装置。该方法进一步包括响应于一级镜片处理装置从处理器接收到一级致动信号而使用一级镜片处理装置将一级补救剂施加到镜片表面。
16、在一个方面,该方法进一步包括在一级镜片处理装置将一级补救剂施加到镜片表面之后,使用处理器确定模糊物是否仍然设置在镜片表面上。该方法进一步包括使用处理器对去除模糊物所做出的尝试次数进行计数,并且使用处理器将尝试次数与最大阈值进行比较。该方法进一步包括响应于处理器确定尝试次数低于最大阈值并且处理器进一步确定一级补救剂未去除整个模糊物而使用处理器确定模糊物的二级分类。该方法进一步包括使用处理器基于二级分类生成二级致动信号。该方法进一步包括响应于二级镜片处理装置从处理器接收到二级致动信号而使用二级镜片处理装置将二级补救剂施加到镜片表面。
17、在另一方面,该方法进一步包括在二级镜片处理装置将二级补救剂施加到镜片表面之后,使用处理器确定模糊物是否仍然设置在镜片表面上。该方法进一步包括使用处理器对去除模糊物所做出的尝试次数进行计数,并且使用处理器将尝试次数与最大阈值进行比较。该方法进一步包括响应于处理器确定尝试次数低于最大阈值并且处理器进一步确定二级补救剂未去除模糊物而使用处理器确定模糊物的三级分类。该方法进一步包括使用处理器基于三级分类生成三级致动信号。该方法进一步包括响应于三级镜片处理装置从处理器接收到三级致动信号而使用三级镜片处理装置将三级补救剂施加到镜片表面。
18、在另一方面,该方法进一步包括使用补充传感器生成与模糊物相关联的补充信号。该方法进一步包括使用处理器基于补充信号确定一级分类、二级分类和/或三级分类的准确度。
19、在另一方面,该方法进一步包括使用温度传感器产生指示环境温度的温度信号。该方法进一步包括响应于指示环境温度高于冰点温度的温度信号而使用处理器确定与冰沉积物相关联的一级分类、二级分类和/或三级分类不准确。
20、在另一方面,该方法进一步包括使用基于气体的镜片处理装置将压缩气体递送到镜片表面以去除形成在对象传感器的镜片表面上的模糊物。该方法进一步包括使用基于液体的镜片处理装置将加压液体递送到镜片表面以去除形成在对象传感器的镜片表面上的模糊物。该方法进一步包括使用基于热量的镜片处理装置将热量施加到镜片表面以去除形成在对象传感器的镜片表面上的模糊物。
21、本公开具有以下方案。
22、方案1. 一种机动车辆的自清洁传感器系统,所述自清洁传感器系统包括:
23、多个对象传感器,其中所述对象传感器中的每一个具有面向多个区域中相关联的一个的镜片表面,所述多个区域彼此不同且位于所述机动车辆外部,所述对象传感器中的每一个生成与相关联区域的图像和视频中的至少一者相关联的信号;
24、多个镜片处理装置,其用于将多种补救剂中相关联的一种施加到所述镜片表面以去除形成在相关联对象传感器的镜片表面上的模糊物,其中所述补救剂彼此不同且所述补救剂中的每一种被配置为从所述镜片表面去除相关联分类的模糊物;
25、计算机,其包括与所述对象传感器中的每一个和所述镜片处理装置电通信的至少一个处理器,并且所述计算机进一步包括存储指令的非暂时性计算机可读存储介质,使得所述至少一个处理器被编程为利用多任务神经网络:
26、响应于所述至少一个处理器从相关联的对象传感器接收到信号而确定所述模糊物的分类;
27、基于所述模糊物的分类生成致动信号;以及
28、将所述致动信号传输到相关联的镜片处理装置;
29、其中,相关联的镜片处理装置响应于相关联的镜片处理装置从所述至少一个处理器接收到所述致动信号而将相关联的补救剂施加到所述镜片表面。
30、方案2. 如方案1所述的自清洁传感器系统,其中,所述多个镜片处理装置包括基于热量的镜片处理装置,用于将热量施加到所述镜片表面以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物。
31、方案3. 如方案2所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为响应于所述至少一个处理器从相关联的对象传感器接收到信号而确定所述模糊物的分类与形成在所述镜片表面上的冰沉积物相关联。
32、方案4. 如方案2所述的自清洁传感器系统,其中,所述多个镜片处理装置进一步包括基于液体的镜片处理装置,用于将加压液体递送到所述镜片表面以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物。
33、方案5. 如方案4所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为响应于所述至少一个处理器从相关联的对象传感器接收到信号而确定所述模糊物的分类与形成在所述镜片表面上的污垢沉积物相关联。
34、方案6. 如方案4所述的自清洁传感器系统,其中,所述多个镜片处理装置进一步包括基于气体的镜片处理装置,用于将压缩气体递送到所述镜片表面以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物。
35、方案7. 如方案6所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为响应于所述至少一个处理器从相关联的对象传感器接收到信号而确定所述模糊物的分类与形成在所述镜片表面上的液体沉积物相关联。
36、方案8. 如方案6所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为:
37、在所述镜片处理装置将相关联的补救剂施加到所述镜片表面之后,确定到所述模糊物的至少一部分设置在所述镜片表面上;
38、对去除所述模糊物所做出的尝试次数进行计数;
39、将所述尝试次数与最大阈值进行比较;以及
40、响应于所述至少一个处理器确定所述尝试次数低于所述最大阈值而生成所述致动信号;
41、其中,相关联的镜片处理装置响应于相关联的镜片处理装置从所述至少一个处理器接收到所述致动信号而将相关联的补救剂施加到所述镜片表面。
42、方案9. 一种机动车辆的自清洁传感器系统,所述自清洁传感器系统包括:
43、多个对象传感器,其中所述对象传感器中的每一个具有面向多个区域中相关联的一个的镜片表面,所述多个区域彼此不同且位于所述机动车辆外部,所述对象传感器中的每一个生成与相关联区域的图像和视频中的至少一者相关联的对象信号;
44、多个镜片处理装置,其用于将多种补救剂中相关联的一种施加到所述镜片表面以去除形成在相关联对象传感器的所述镜片表面上的模糊物,其中所述补救剂彼此不同且所述补救剂中的每一种被配置为从所述镜片表面去除相关联分类的模糊物,并且所述镜片处理装置包括用于将一级补救剂施加到所述镜片表面的一级镜片处理装置;
45、计算机,其包括与所述对象传感器中的每一个和所述镜片处理装置电通信的至少一个处理器,并且所述计算机进一步包括存储指令的非暂时性计算机可读存储介质,使得所述至少一个处理器被编程为利用多任务神经网络:
46、响应于所述至少一个处理器从相关联的对象传感器接收到所述对象信号而确定所述模糊物的一级分类;
47、基于所述模糊物的一级分类生成一级致动信号;以及
48、将所述一级致动信号传输到相关联的镜片处理装置;
49、其中,所述一级镜片处理装置响应于所述一级镜片处理装置从所述至少一个处理器接收到所述一级致动信号而将所述一级补救剂施加到所述镜片表面。
50、方案10. 如方案9所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为:
51、在所述一级镜片处理装置将所述一级补救剂施加到所述镜片表面之后,确定所述模糊物的至少一部分设置在所述镜片表面上;
52、对去除所述模糊物所做出的尝试次数进行计数;
53、将所述尝试次数与最大阈值进行比较;并且
54、响应于所述至少一个处理器确定所述尝试次数低于所述最大阈值且所述一级补救剂未去除所述模糊物而确定所述模糊物的二级分类;
55、基于所述二级分类生成二级致动信号;以及
56、其中,所述多个镜片处理装置进一步包括二级镜片处理装置,用于响应于所述二级镜片处理装置从所述至少一个处理器接收到所述二级致动信号而将二级补救剂施加到所述镜片表面。
57、方案11. 如方案10所述的自清洁传感器系统,其中,所述至少一个处理器进一步被编程为:
58、在所述二级镜片处理装置将所述二级补救剂施加到所述镜片表面之后,确定所述模糊物的至少一部分设置在所述镜片表面上;
59、对去除所述模糊物所做出的尝试次数进行计数;
60、将所述尝试次数与最大阈值进行比较;并且
61、响应于所述至少一个处理器确定所述尝试次数低于所述最大阈值且所述至少一个处理器进一步确定所述二级补救剂未去除所述模糊物而确定所述模糊物的三级分类;
62、基于所述三级分类生成三级致动信号;并且
63、其中,所述多个镜片处理装置进一步包括三级镜片处理装置,用于响应于所述三级镜片处理装置从所述至少一个处理器接收到所述三级致动信号而将三级补救剂施加到所述镜片表面。
64、方案12. 如方案11所述的自清洁传感器系统,其进一步包括生成与所述模糊物相关联的补充信号的至少一个补充传感器,其中,所述至少一个处理器基于所述补充信号确定所述一级分类、所述二级分类和所述三级分类中的至少一种的准确度。
65、方案13. 如方案12所述的自清洁传感器系统,其中,所述至少一个补充传感器包括用于生成指示环境温度的温度信号的温度传感器,并且所述模糊物的所述一级分类、所述二级分类和所述三级分类中的一种与形成在所述镜片表面上的冰沉积物相关联,并且所述至少一个处理器响应于指示所述环境温度高于冰点温度的所述温度信号而确定所述冰沉积物的所述一级分类不准确。
66、方案14. 如方案13所述的自清洁传感器系统,其中,所述一级镜片处理装置、所述二级镜片处理装置和所述三级镜片处理装置包括:
67、基于气体的镜片处理装置,其用于将压缩气体递送到所述镜片表面,以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物;
68、基于液体的镜片处理装置,其用于将加压液体递送到所述镜片表面,以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物;以及
69、基于热量的镜片处理装置,其用于将热量施加到所述镜片表面以去除形成在相关联对象传感器的所述镜片表面上的所述模糊物。
70、方案15. 一种操作用于机动车辆的自清洁传感器系统的方法,所述自清洁传感器系统具有多个对象传感器,其中所述对象传感器中的每一个具有面向位于所述机动车辆外部的多个区域中相关联的一个的镜片表面,所述自清洁传感器系统进一步具有多个镜片处理装置,包括一级镜片处理装置、二级镜片处理装置和三级镜片处理装置,所述自清洁传感器系统进一步具有至少一个补充传感器,所述自清洁传感器系统进一步具有计算机,所述计算机包括与所述对象传感器中的每一个和所述镜片处理装置电通信的至少一个处理器,并且所述计算机进一步包括存储指令的非暂时性计算机可读存储介质,所述方法包括:
71、使用所述对象传感器中的每一个生成与相关联区域的图像和视频中的至少一者相关联的对象信号;
72、响应于所述至少一个处理器从相关联的对象传感器接收到所述对象信号而使用所述至少一个处理器确定所述模糊物的一级分类;
73、使用所述至少一个处理器基于所述模糊物的所述一级分类生成一级致动信号;
74、使用所述至少一个处理器将所述一级致动信号传输到所述一级镜片处理装置;以及
75、响应于所述一级镜片处理装置从所述至少一个处理器接收到所述一级致动信号而使用所述一级镜片处理装置将一级补救剂施加到所述镜片表面。
76、方案16. 如方案15所述的方法,其进一步包括:
77、在所述一级镜片处理装置将所述一级补救剂施加到所述镜片表面之后,使用所述至少一个处理器确定所述模糊物是否设置在所述镜片表面上;
78、使用所述至少一个处理器对去除所述模糊物所做出的尝试次数进行计数;
79、使用所述至少一个处理器将所述尝试次数与最大阈值进行比较;以及
80、响应于所述至少一个处理器确定所述尝试次数低于所述最大阈值且所述至少一个处理器进一步确定所述一级补救剂未去除所述模糊物而使用所述至少一个处理器确定所述模糊物的二级分类;
81、使用所述至少一个处理器基于所述二级分类生成二级致动信号;以及
82、响应于相关联的镜片处理装置从所述至少一个处理器接收到所述二级致动信号而使用所述二级镜片处理装置将二级补救剂施加到所述镜片表面。
83、方案17. 如方案16所述的方法,其进一步包括:
84、在所述二级镜片处理装置将所述二级补救剂施加到所述镜片表面之后,使用所述至少一个处理器确定所述模糊物是否设置在所述镜片表面上;
85、使用所述至少一个处理器对去除所述模糊物所做出的所述尝试次数进行计数;
86、使用所述至少一个处理器将所述尝试次数与所述最大阈值进行比较;以及
87、响应于所述至少一个处理器确定所述尝试次数低于所述最大阈值且所述至少一个处理器进一步确定所述二级补救剂未去除所述模糊物而使用所述至少一个处理器确定所述模糊物的三级分类;
88、使用所述至少一个处理器基于所述三级分类生成三级致动信号;以及
89、响应于所述三级镜片处理装置从所述至少一个处理器接收到所述三级致动信号而使用所述三级镜片处理装置将三级补救剂施加到所述镜片表面。
90、方案18. 如方案17所述的方法,其进一步包括:
91、使用所述至少一个补充传感器生成与所述模糊物相关联的补充信号;以及
92、使用所述至少一个处理器,基于所述补充信号确定所述一级分类、所述二级分类和所述三级分类中的至少一种的准确度。
93、方案19. 如方案18所述的方法,其进一步包括:
94、使用温度传感器生成指示环境温度的温度信号;以及
95、响应于所述至少一个处理器确定所述温度信号指示所述环境温度高于冰点温度而使用所述至少一个处理器确定所述模糊物的所述一级分类、所述二级分类和所述三级分类中的至少一种与形成在所述镜片表面上的所述冰沉积物相关联并且不准确。
96、方案20. 如方案19所述的方法,其进一步包括:
97、使用基于气体的镜片处理装置将压缩气体递送到所述镜片表面,以去除形成在所述对象传感器的所述镜片表面上的所述模糊物;
98、使用基于液体的镜片处理装置将加压液体递送到所述镜片表面,以去除形成在所述对象传感器的所述镜片表面上的所述模糊物;以及
99、使用基于热量的镜片处理装置将热量施加到所述镜片表面以去除形成在所述对象传感器的所述镜片表面上的所述模糊物。
100、从本文提供的描述中,进一步的应用领域将变得显而易见。应当理解,描述和具体示例仅旨在用于说明的目的,而不旨在限制本公开的范围。
- 还没有人留言评论。精彩留言会获得点赞!