基于车辆价值识别的车辆驾驶控制方法、装置及存储介质与流程
本技术涉及车辆控制,特别涉及一种基于车辆价值识别的车辆驾驶控制方法、装置及存储介质。
背景技术:
1、在交通道路行驶过程中,通常需要依靠驾驶人的自身判断去控制车辆进行变道或直线加减速的行驶,一旦判断失误,就有可能造成车祸,以及面临因车祸而带来的高额经济损失和人身安全问题。
2、同时,现有的机动车大多配有自动驾驶模式,但由于自动驾驶模式的技术还不成熟,稳定性不足,在车况复杂的环境中,容易出现判断错误,执行不合理的驾驶操作,给驾驶人带来安全隐患,一旦发生车祸,也有可能面临因车祸而带来的高额经济损失。
技术实现思路
1、为了解决至少一个上述相关技术中存在的技术问题,本技术实施例提供了一种基于车辆价值识别的车辆驾驶控制方法、装置及存储介质。
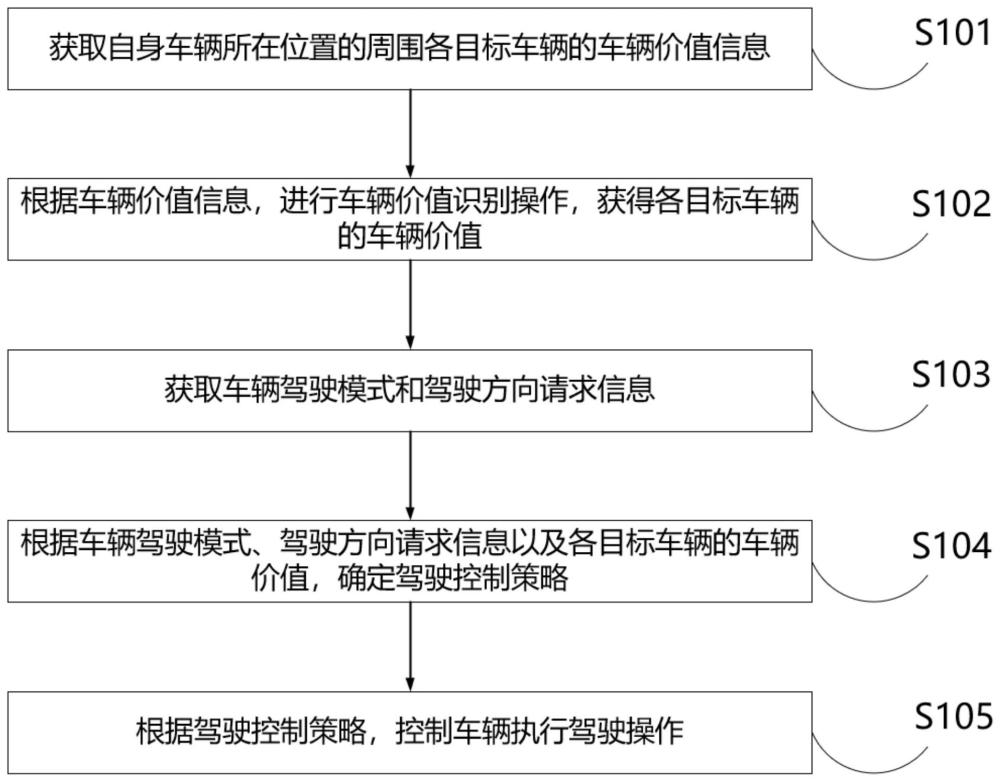
2、本技术实施例的第一方面提出了一种基于车辆价值识别的车辆驾驶控制方法,包括:
3、获取自身车辆所在位置的周围各目标车辆的车辆价值信息;
4、根据所述车辆价值信息,进行车辆价值识别操作,获得各所述目标车辆的车辆价值;
5、获取车辆驾驶模式和驾驶方向请求信息;所述车辆驾驶模式包括自动驾驶模式与人工驾驶模式;
6、根据所述车辆驾驶模式、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定驾驶控制策略;
7、根据所述驾驶控制策略,控制车辆执行驾驶操作。
8、在一些实施例,所述方法还包括:
9、根据各目标车辆的所述车辆价值,确定各目标车辆的车辆价值等级。
10、在一些实施例,所述车辆价值信息包括车辆品牌信息以及车辆型号信息,所述根据所述车辆价值信息,进行车辆价值识别操作,获得各所述目标车辆的车辆价值这一步骤,具体包括:
11、根据各目标车辆的所述车辆品牌信息和所述车辆型号信息,计算各目标车辆对应的所述车辆价值。
12、在一些实施例,所述驾驶方向请求信息包括直行驾驶请求信息以及变道请求信息,所述根据所述车辆驾驶模式、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定驾驶控制策略这一步骤,具体包括:
13、获取安全行驶车距范围;
14、当所述车辆驾驶模式为所述自动驾驶模式时,根据所述驾驶方向请求信息、所述安全行驶车距范围、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定所述变道控制策略;
15、当所述车辆驾驶模式为所述人工驾驶模式时,根据所述驾驶方向请求信息、所述安全行驶车距范围、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定是否发出驾驶请求预警。
16、在一些实施例,所述安全行驶车距范围包括直行安全车距范围以及变道安全车距范围,所述当所述车辆驾驶模式为所述自动驾驶模式时,根据所述驾驶方向请求信息、所述安全行驶车距范围、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定所述变道控制策略这一步骤,具体包括:
17、获取自身车辆的车辆保险价值;
18、当所述驾驶方向请求信息为所述直行驾驶请求信息时,判断第一车距是否在所述直行安全车距范围内,确定第一判断结果,判断第二车距是否在所述直行安全车距范围内,确定第二判断结果,根据所述第一判断结果和所述第二判断结果,确定是否调整所述直行驾驶请求信息;所述第一车距为自身车辆与前方目标车辆的车距;所述第二车距为自身车辆与后方目标车辆的车距;
19、当所述第一判断结果为所述第一车距不在所述直行安全车距范围内,或所述第一判断结果为所述第二车距不在所述直行安全车距范围内,调整所述直行驾驶请求信息为所述变道请求信息,否则继续响应所述直行驾驶请求信息,根据所述第一判断结果、所述第二判断结果以及车辆价值比较结果,确定直行控制策略;所述车辆价值比较结果为所述车辆保险价值与直行方向上的各目标车辆的所述车辆价值的比较结果;
20、当所述驾驶请求信息为所述变道请求信息时,比较第三车辆价值和所述车辆保险价值,确定第三比较结果,判断第三车距是否在所述变道安全车距范围内,确定第三判断结果;所述第三车辆价值为变道侧目标车辆的价值;所述第三车距为自身车辆与变道侧车辆的车距;
21、根据所述第三比较结果以及所述第三判断结果,确定所述变道控制策略。
22、在一些实施例,所述当所述第一判断结果为所述第一车距不在所述直行安全车距范围内,或所述第一判断结果为所述第二车距不在所述直行安全车距范围内,调整所述直行驾驶请求信息为所述变道请求信息,否则继续响应所述直行驾驶请求信息,根据所述第一判断结果、所述第二判断结果以及车辆价值比较结果,确定直行控制策略这一步骤,具体包括:
23、比较第一车辆价值和所述车辆保险价值,确定第一比较结果,比较第二车辆价值和所述车辆保险价值,确定第二比较结果;所述第一车辆价值为前方目标车辆的车辆价值;所述第二车辆价值为后方目标车辆的车辆价值;
24、当所述第一比较结果为所述第一车辆价值小于所述车辆保险价值,以及所述第二比较结果为所述第二车辆价值小于所述车辆保险价值时,确定所述直行控制策略为控制自身车辆保持当前速度直行;
25、当所述第一比较结果为所述第一车辆价值小于所述车辆保险价值,以及所述第二比较结果为所述第二车辆价值大于所述车辆保险价值时,确定所述直行控制策略为控制自身车辆执行直行加速行驶操作;
26、当所述第一比较结果为所述第一车辆价值大于所述车辆保险价值,以及所述第二比较结果为所述第二车辆价值小于所述车辆保险价值时,确定所述直行控制策略为控制自身车辆执行直行减速行驶操作;
27、当所述第一比较结果为所述第一车辆价值大于所述车辆保险价值,以及所述第二比较结果为所述第二车辆价值大于所述车辆保险价值时,调整所述直行驾驶请求信息为所述变道请求信息。
28、在一些实施例,所述根据所述第三比较结果以及所述第三判断结果,确定所述变道控制策略这一步骤,具体包括:
29、当所述第三判断结果为所述第三车距不在所述变道安全车距范围内时,确定所述变道控制策略为停止执行变道驾驶操作;
30、当所述第三判断结果为所述第三车距在所述变道安全车距范围内,以及所述第三比较结果为所述第三车辆价值大于所述车辆保险价值时,确定所述变道控制策略为在变道侧车辆先行超越自身车辆后再根据所述变道请求信息,控制自身车辆执行变道驾驶操作;
31、当所述第三判断结果为所述第三车距在所述变道安全车距范围内,以及所述第三比较结果为所述第三车辆价值小于所述车辆保险价值时,确定所述变道控制策略为根据所述变道请求信息,控制自身车辆执行变道驾驶操作。
32、在一些实施例,所述当所述车辆驾驶模式为所述人工驾驶模式时,根据所述驾驶方向请求信息、所述安全行驶车距范围、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定是否发出驾驶请求预警这一步骤,具体包括:
33、当所述驾驶方向请求信息为直行驾驶请求信息中的直行加速请求,所述第一判断结果为所述第一车距不在所述直行安全车距范围内,以及所述第一比较结果为所述第一车辆价值大于所述车辆保险价值时,发出直行加速预警;
34、当所述驾驶方向请求信息为直行驾驶请求信息中的直行减速请求,所述第二判断结果为所述第二车距不在所述直行安全车距范围内,以及所述第二比较结果为所述第二车辆价值大于所述车辆保险价值时,发出直行减速预警;
35、当所述驾驶方向请求信息为变道请求信息,所述第三判断结果为所述第三车距不在所述变道安全车距范围内,以及所述第三比较结果为所述第三车辆价值大于所述车辆保险价值时,发出变道行驶预警。
36、本技术实施例的第二方面提出了一种基于车辆价值识别的车辆驾驶控制装置,包括:
37、第一模块,用于获取自身车辆所在位置的周围各目标车辆的车辆价值信息;
38、第二模块,用于根据所述车辆价值信息,进行车辆价值识别操作,获得各所述目标车辆的车辆价值;
39、第三模块,用于获取车辆驾驶模式和驾驶方向请求信息;所述车辆驾驶模式包括自动驾驶模式与人工驾驶模式;
40、第四模块,用于根据所述车辆驾驶模式、所述驾驶方向请求信息以及各所述目标车辆的车辆价值,确定驾驶控制策略;
41、第五模块,用于根据所述驾驶控制策略,控制车辆执行驾驶操作。
42、本技术实施例的第三方面提出了一种计算机可读存储介质,所述计算机可读存储介质包括计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的车辆驾驶控制方法。
43、本技术提供的一种基于车辆价值识别的车辆驾驶控制方法、装置及存储介质,其通过获取各目标车辆的车辆价值信息,进行车辆价值识别操作,获得各目标车辆的车辆价值,根据车辆驾驶模式、驾驶方向请求信息以及各目标车辆的车辆价值,确定驾驶控制策略,控制车辆执行驾驶操作。本技术能够结合车辆价值识别技术,根据车辆驾驶模式和驾驶请求信息,控制车辆执行驾驶操作,大大提高车辆驾驶的安全性,以及避免因车祸而造成的高额经济损失,提高车辆自动驾驶时的驾驶稳定性和灵敏性。
- 还没有人留言评论。精彩留言会获得点赞!