车辆的控制装置、车辆的控制方法及程序与流程
本公开涉及车辆的控制装置、车辆的控制方法及程序。
背景技术:
1、专利文献1公开了如下装置,该装置在通过对自身车辆的前侧方进行检测的毫米波雷达识别到的移动物与自身车辆碰撞的可能性高的情况下,执行使制动装置自动地工作的碰撞避免控制。这样的碰撞避免控制也被称为pcs控制(pre-crash safety control,预防碰撞安全控制)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2020-12702号公报
技术实现思路
1、若通过相机来识别自身车辆的前侧方物标,则由于与毫米波雷达相比相机的物标(物体目标)识别能力高,所以能够提高pcs控制的精度,但存在装置的成本高这样的课题。因而,通常来说,采用通过毫米波雷达识别自身车辆的前侧方物标的构成。
2、然而,在通过毫米波雷达识别前侧方物标的构成中,存在将呈现出不同于主体部的举动的附属物识别为主体部以外的移动物的情况。作为具体例,存在将室外机的风扇识别为室外机以外的移动物、或者将在自身车辆的前侧方行驶的前行车辆的车轮识别为前行车辆以外的移动物的情况。若基于这样的误识别执行pcs控制,则有可能尽管移动物实际上没有接近自身车辆却招致pcs控制的不必要的工作。
3、本公开是为了解决上述课题而完成的。即,本公开的目的之一在于,有效地抑制pcs控制的不必要的工作。
4、本公开的技术是一种车辆的控制装置,其中,
5、所述控制装置具备检测自身车辆的前侧方的物体作为前侧方物标的物标(物体目标)检测部(40)、和处理器(10),
6、所述处理器(10)构成为能够执行:
7、避免处理,在被所述物标检测部(40)检测为所述前侧方物标的一个移动物(wh、f)满足预定的碰撞条件的情况下,实施用于避免所述自身车辆(sv)与所述一个移动物(wh、f)的碰撞或减轻所述碰撞的伤害(损伤)的碰撞避免控制;和
8、抑制处理,在由所述物标检测部(40)在所述一个移动物(wh、f)附近的预定范围内检测到其他移动物(vb)或静止物(ub)的情况下,抑制基于所述一个移动物(wh、f)的所述碰撞避免控制的实施。
9、根据以上的方案,处理器(10)在作为前侧方物标而检测到一个移动物(wh、f)时,在一个移动物(wh、f)附近的预定范围内检测到成为一个移动物(wh、f)的主体的其他移动物(vb)或静止物(ub)的情况下,抑制基于一个移动物(wh、f)的碰撞避免控制的实施。由此,能够有效地抑制碰撞避免控制的不必要的工作。
10、在本公开的另一方案中,优选的是,
11、所述处理器(10),
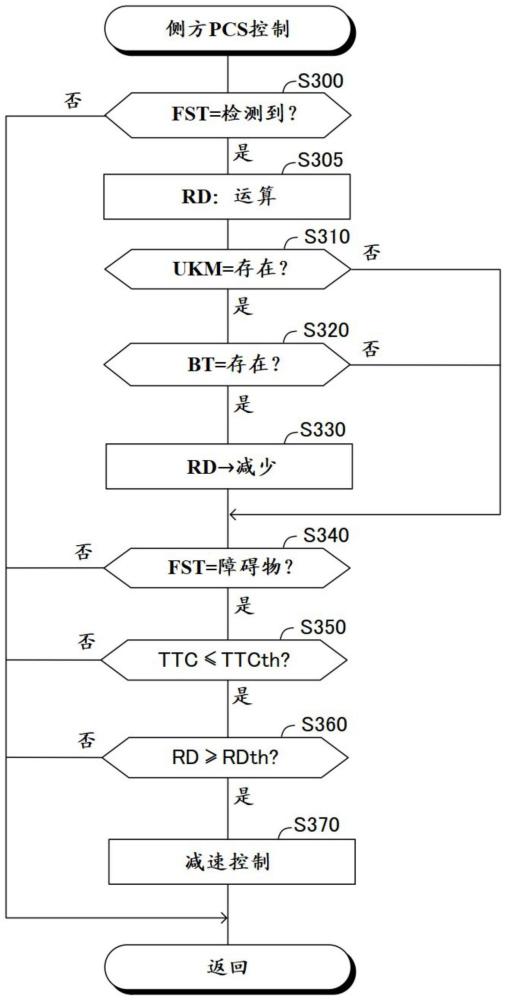
12、运算表示由所述物标检测部(40)检测到的所述一个移动物(wh、f)实际存在的可能性的指标值(rd),并且,在所述指标值(rd)成为预定的阈值(rdth)以上、且所述一个移动物(wh、f)满足所述碰撞条件的情况下,执行所述碰撞避免控制,
13、在所述抑制处理中,在由所述物标检测部(40)在所述预定范围内检测到所述其他移动物(vb)或静止物(ub)的情况下,通过使所述指标值(rd)减少来抑制基于所述一个移动物(wh、f)的所述碰撞避免控制的实施。
14、在本公开的另一方案中,优选的是,
15、所述处理器(10),
16、在所述物标检测部(40)检测到所述其他移动物(vb)时,在所述一个移动物(wh)及所述其他移动物(vb)在与所述自身车辆(sv)正在行驶的车道相邻的相邻车道内位于所述自身车辆(sv)前方的预定距离内的情况下,执行所述抑制处理,
17、在所述物标检测部(40)检测到所述静止物(ub)时,在所述一个移动物(f)及所述静止物(ub)位于以室外机的平均的外形尺寸为基准而设定的设定范围内的情况下,执行所述抑制处理。
18、在上述说明中,为了帮助理解发明,对于与实施方式对应的发明的构成要件,以写入括号内的方式添加了在实施方式中使用的附图标记,但发明的各构成要件不限定于由所述附图标记所规定的实施方式。
技术特征:
1.一种车辆的控制装置,
2.根据权利要求1所述的车辆的控制装置,
3.根据权利要求1或2所述的车辆的控制装置,
4.一种车辆的控制方法,该车辆具备检测自身车辆的前侧方的物体作为前侧方物标的物标检测部,
5.一种程序,使具备检测自身车辆的前侧方的物体作为前侧方物标的物标检测部的车辆的控制装置的处理器执行:
技术总结
一种车辆的控制装置、车辆的控制方法及程序,抑制碰撞避免控制的不必要的工作。控制装置具备检测自身车辆的前侧方的物体作为前侧方物标的物标检测部(40)、和处理器(10),处理器(10)构成为能够执行:避免处理,在被物标检测部(40)检测为前侧方物标的一个移动物(WH、F)满足预定的碰撞条件的情况下,实施用于避免自身车辆(SV)与一个移动物(WH、F)的碰撞或减轻碰撞的伤害的碰撞避免控制;和抑制处理,在由物标检测部(40)在一个移动物(WH、F)附近的预定范围内检测到其他移动物(VB)或静止物(UB)的情况下,抑制基于一个移动物(WH、F)的碰撞避免控制的实施。
技术研发人员:陈希,八十岛恒和,冈本和也
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!