一种适用于附着极限工况的车辆路径跟踪控制方法及装置
本发明涉及车辆自动驾驶控制,尤其涉及一种适用于附着极限工况的车辆路径跟踪控制方法及装置。
背景技术:
1、附着极限工况是引发致命交通事故的主要原因之一。车辆在高速过弯、受侧向碰撞、冰雪路面行驶或者紧急避障时容易进入附着极限工况。在附着极限工况下,由于维持车辆运动所需要的力达到甚至超越路面所能提供的极限附着力,车辆容易引发失稳失控,造成严重的交通事故。
2、本技术的发明人在研究中发现,现有的自动驾驶车辆的车辆路径控制方法通常是基于线性二自由度车辆动力学模型设计,设计的路径跟踪控制器适用于车辆的侧向加速度小于0.4g,轮胎侧偏特性处于线性范围的工况,并不涵盖轮胎侧偏特性达到饱和区的工况,也就是无法满足附着极限工况下的路径跟踪控制的需求。
技术实现思路
1、针对上述问题,本发明的目的是提供一种适用于附着极限工况的车辆路径跟踪控制方法及装置,能够针对前轮转向后轮驱动的车辆,满足后轴轮胎力达到附着极限时的车辆路径跟踪控制的需求,从而拓展自动驾驶车辆的路径跟踪控制器的使用工况,提高车辆在复杂交通环境中的行驶安全性。
2、为实现上述目的,本发明采取以下技术方案:
3、第一方面,本技术提供一种适用于附着极限工况的车辆路径跟踪控制方法,所述方法包括:
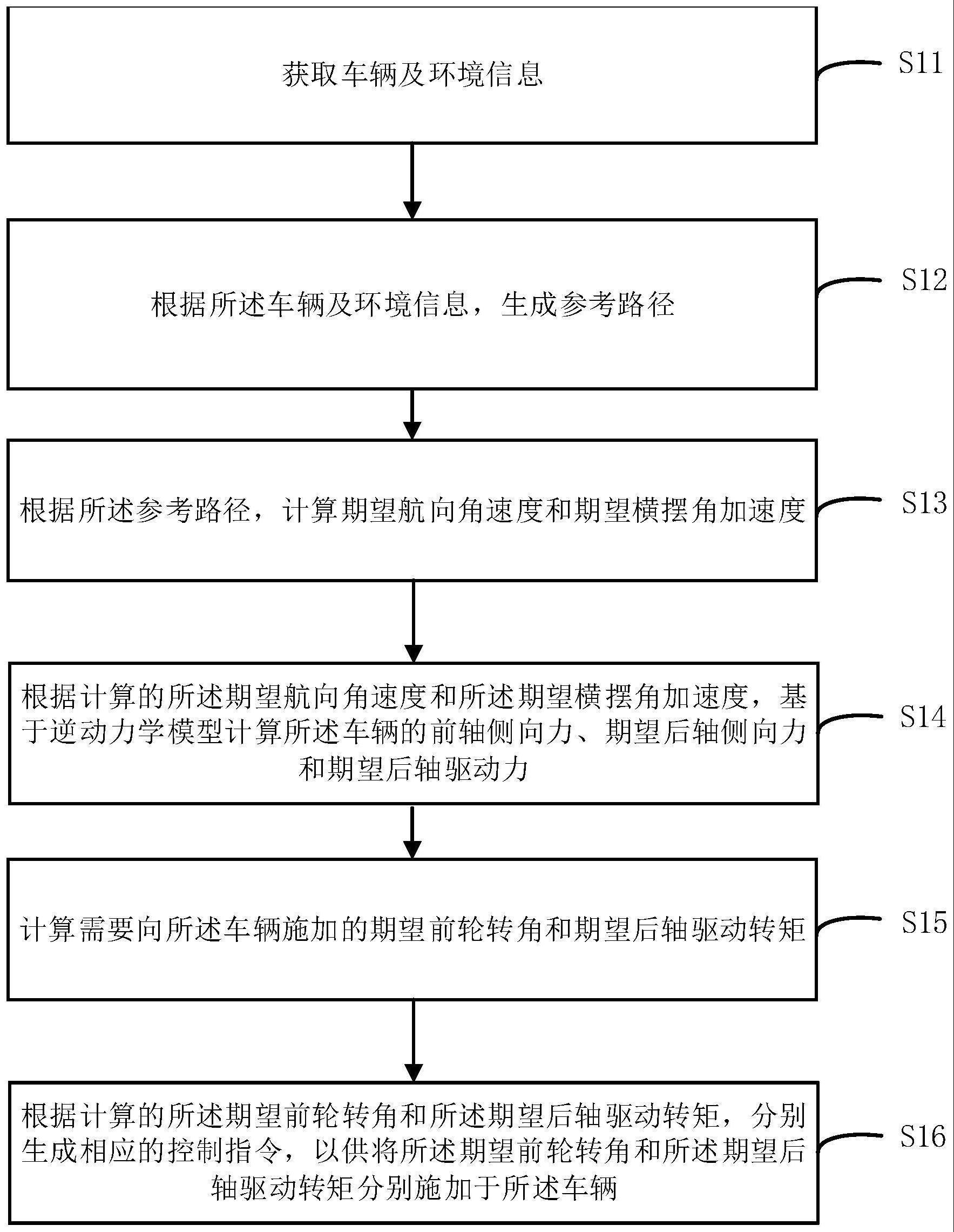
4、s11,获取车辆及环境信息;
5、s12,根据所述车辆及环境信息,生成参考路径;
6、s13,根据所述参考路径,计算期望航向角速度和期望横摆角加速度;
7、s14,根据计算的所述期望航向角速度和所述期望横摆角加速度,基于逆动力学模型计算所述车辆的前轴侧向力、期望后轴侧向力和期望后轴驱动力;
8、s15,计算需要向所述车辆施加的期望前轮转角和期望后轴驱动转矩;
9、s16,根据计算的所述期望前轮转角和所述期望后轴驱动转矩,分别生成相应的控制指令,以供将所述期望前轮转角和所述期望后轴驱动转矩分别施加于所述车辆。
10、在本技术的一种实现方式中,所述获取车辆及环境信息,包括:
11、获取车辆参数、车辆状态及环境参数;
12、所述车辆参数,包括车辆质量m、车辆横摆转动惯量iz、车辆前轴距a、车辆后轴距b、车轮半径rw,以及车辆前轮轮胎力特性二维表格fy=f(α,fz),其中,α为轮胎侧偏角,fz为轮胎垂直载荷;
13、所述车辆状态,包括车辆质心在全局坐标系中的位置(x,y)、车辆纵向和横向速度(vx,vy)、车辆横摆角速度r、车辆横摆角车辆前后轴垂直载荷(fzf,fzr),以及车辆前轮转角δf;
14、所述环境参数包括路面附着系数μ。
15、在本技术的一种实现方式中,生成的所述参考路径,包括全局坐标系下参考路径的坐标(xref,yref)、参考航向角φref、参考曲率κref,以及参考质心侧偏角βref。
16、在本技术的一种实现方式中,所述计算期望航向角速度,包括:
17、s311:计算车辆横向位置误差ed:
18、
19、其中,为车辆质心在全局坐标系中的坐标,为车辆质心在参考路径上的投影点在全局坐标系中的坐标,为投影点处的法向量,
20、s312:计算虚拟控制输入φsyn:
21、
22、其中,v为车辆质心速度幅值,kd取大于零的常数;
23、s313:定义航向角偏差为eφ=φ-φsyn,计算期望的航向角加速度
24、
25、其中,kφ取大于零的常数。
26、在本技术的一种实现方式中,所述期望横摆角加速度的计算过程包括;
27、s321:计算车辆质心侧偏角偏差eβ:
28、eβ=β-βref
29、其中,β为车辆质心侧偏角,
30、s322:计算虚拟控制输入rsyn:
31、
32、其中,kβ取大于零的常数;
33、s323:定义横摆角速度跟踪误差er=r-rsyn,计算期望横摆角加速度
34、
35、其中,kr取大于零的常数。
36、在本技术的一种实现方式中,所述计算所述车辆的前轴侧向力、期望后轴侧向力和期望后轴驱动力的过程,包括:
37、s41:采用下列公式计算期望前轴侧向力和期望后轴侧向力
38、
39、s42:判断条件是否满足,若满足,则跳至s45,若不满足,继续执行s43。
40、s43:判断条件βref>0是否满足,若满足,则期望前轴侧向力为若不满足,则期望前轴侧向力为
41、s44:采用下列公式计算期望后轴侧向力
42、
43、s45:计算期望后轴纵向力
44、
45、在本技术的一种实现方式中,所述计算需要向所述车辆施加的期望前轮转角和期望后轴驱动转矩,包括:
46、s51:根据期望前轴侧向力和前轴垂直载荷fzf,查二维轮胎模型表格fy=f(α,fz),得到期望前轴侧偏角αf,则期望前轮转角为:
47、
48、s52:采用下列公式计算期望后轴驱动转矩ttdes:
49、
50、第二方面,本技术提供一种适用于附着极限工况的车辆路径跟踪控制装置,所述装置包括:
51、车辆及环境信息感知模块,用于获取车辆及环境信息;
52、参考路径生成模块,用于根据所述车辆及环境信息,生成参考路径;
53、路径跟踪控制模块,包括横向误差控制单元和质心侧偏角控制单元,用于根据所述参考路径,分别计算期望航向角速度和期望横摆角加速度;
54、逆动力学模型模块,用于根据计算的所述期望航向角速度和所述期望横摆角加速度,计算所述车辆的前轴侧向力、期望后轴侧向力和期望后轴驱动力;
55、执行器控制命令生成模块,用于计算需要向所述车辆施加的期望前轮转角和期望后轴驱动转矩,并根据计算的所述期望前轮转角和所述期望后轴驱动转矩,分别生成相应的控制指令,以供将所述期望前轮转角和所述期望后轴驱动转矩分别施加于所述车辆。
56、第三方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序运行时控制所述计算机可读存储介质所在设备执行上述第一方面所述的适用于附着极限工况的车辆路径跟踪控制方法。
57、第四方面,本技术提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序,实现上述第一方面所述的适用于附着极限工况的车辆路径跟踪控制方法。
58、本发明由于采取以上技术方案,其具有以下优点:本发明申请方案中,通过获取车辆及环境信息,生成参考路径,再根据参考路径,计算期望航向角速度和期望横摆角加速度,然后基于逆动力学模型计算车辆的前轴侧向力、期望后轴侧向力和期望后轴驱动力,进一步计算需要向车辆施加的期望前轮转角和期望后轴驱动转矩,并分别生成相应的控制指令,以供将期望前轮转角和期望后轴驱动转矩分别施加于车辆,从而实现了在后轴达到附着极限工况时车辆的路径跟踪控制,将车辆路径跟踪控制系统的使用工况由轮胎侧偏特性的线性区扩展到饱和区,提高了车辆在复杂道路交通环境中的行驶安全性。
- 还没有人留言评论。精彩留言会获得点赞!