用于在动态长度下进行卡车倒车的方法与流程
本公开涉及一种具有后挡板的车辆,所述后挡板可在缩回位置与伸出位置之间移动。例如,本公开涉及当后挡板处于伸出位置时在卡车倒车期间辅助卡车用户的卡车倒车系统和方法。
背景技术:
1、电子商务、运输、制造等行业严重依赖皮卡车。与小型载客车相比,皮卡车具有更大的货物搬运能力,并且通常为货物运输提供更大的效用。此外,一些皮卡车包括后挡板或可伸展货厢,使得卡车用户能够进一步提高卡车的货物搬运能力。
2、虽然伸出后挡板可增加卡车的货物搬运能力,但当卡车用户使具有伸出的后挡板的卡车倒车时,卡车用户可能需要外部支持或引导。
3、许多卡车包括安装在卡车后部的超声波传感器,所述超声波传感器可在卡车倒车期间辅助卡车用户。例如,当卡车用户使卡车倒退并且障碍物位于卡车后端附近时,超声波传感器可通知卡车用户。然而,当障碍物位于后挡板的伸出边缘附近时,卡车的超声波传感器可能不会通知卡车用户。
技术实现思路
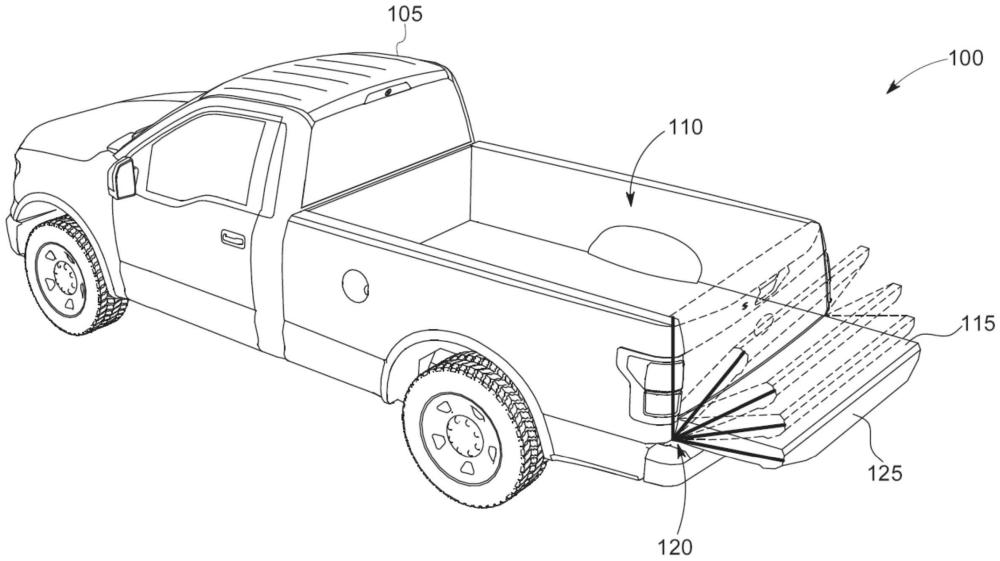
1、在某些实施例中,车辆可以是例如具有货厢的皮卡车。车辆用户可通过将后挡板从缩回位置移动到完全伸出位置或中间伸出位置来增加车辆的货物搬运能力。车辆可包括处理器,当用户在后挡板处于完全伸出位置或中间伸出位置的情况下使车辆倒退时,所述处理器可辅助用户。具体地,当用户使车辆倒退时,处理器可使用车辆超声波传感器来检测车辆后侧附近的障碍物,并在障碍物与后挡板(或车辆后侧)之间的距离小于阈值时通知用户。在一些方面,处理器可被配置为基于后挡板位置(例如,缩回位置、完全伸出位置或中间位置)和超声波传感器输入来计算后挡板顶侧与障碍物之间的距离,并且当障碍物与后挡板顶侧之间的距离小于阈值时向用户传输音频或视觉通知。
2、具体地,当用户使车辆倒退时,处理器可通过使用检测单元来确定后挡板处于缩回位置还是伸出位置。检测单元可以是例如后挡板微开开关。响应于确定后挡板处于伸出位置,处理器可确定后挡板伸出取向。所述后挡板伸出取向可指示后挡板可相对于货厢平面或车辆侧边缘倾斜的角度。在一些方面,处理器可通过使用可安装在后挡板上的车辆中央高位刹车灯(chmsl)相机和/或双倒车相机来确定后挡板伸出取向。处理器还可基于后挡板伸出取向计算后挡板伸出部分长度。
3、此外,处理器可确定车辆后侧附近的障碍物的高度是否高于后挡板水平。处理器可通过使用从车辆chmsl相机和双倒车相机所接收的输入来确定障碍物高度。当障碍物高度高于后挡板水平时,处理器还可基于后挡板伸出部分长度计算后挡板顶侧与障碍物之间的距离。随着用户使车辆倒退,当距离减小到阈值以下时,处理器可向用户发送音频或视觉通知。
4、本公开公开了一种用于在后挡板伸出的情况下辅助用户使车辆倒退的系统。所述系统使用现有的车辆部件和传感器来确定后挡板取向并在车辆倒车操作期间辅助用户。因此,所述系统不需要额外的资源并且不会增加车辆的重量和复杂性。此外,所述系统可与不同类型的后挡板(例如,实心单后挡板、具有台阶的分体式后挡板等)一起工作。
5、在本文中详细地提供了本公开的这些和其他优点。
技术特征:
1.一种车辆,其包括:
2.如权利要求1所述的车辆,其中所述控制单元还被配置为:
3.如权利要求1所述的车辆,其还包括第一后挡板闩锁和第二后挡板闩锁,并且所述第一检测单元被配置为通过确定第一后挡板闩锁状态和第二后挡板闩锁状态来检测所述后挡板闩锁状态。
4.如权利要求1所述的车辆,其中所述后挡板是具有第一部分和第二部分的分体式后挡板,其中所述第一部分和所述第二部分是侧铰接的,并且其中所述第一检测单元还被配置为检测所述第一部分和所述第二部分的所述后挡板闩锁状态。
5.如权利要求1所述的车辆,其中所述控制单元还被配置为:
6.如权利要求1所述的车辆,其中所述控制单元还被配置为:
7.如权利要求1所述的车辆,其还包括安装在车辆后护板中的超声波传感器,其中所述控制单元还被配置为:
8.如权利要求1所述的车辆,其中所述控制单元还被配置为:
9.一种用于在具有后挡板的车辆的倒车期间辅助车辆用户的方法,所述方法包括:
10.如权利要求9所述的方法,其还包括:
11.如权利要求9所述的方法,其中所述车辆包括第一后挡板闩锁和第二后挡板闩锁,并且所述第一检测单元被配置为通过确定第一后挡板闩锁状态和第二后挡板闩锁状态来检测所述后挡板闩锁状态。
12.如权利要求9所述的方法,其中所述后挡板是具有第一部分和第二部分的分体式后挡板,其中所述第一部分和所述第二部分是侧铰接的,并且其中所述第一检测单元还被配置为检测所述第一部分和所述第二部分的所述后挡板闩锁状态。
13.如权利要求9所述的方法,其还包括:
14.如权利要求9所述的方法,其还包括:
15.如权利要求9所述的方法,其还包括:
技术总结
本公开提供“用于在动态长度下进行卡车倒车的方法”。公开了一种车辆,车辆具有后挡板,后挡板被配置为在缩回位置与伸出位置之间移动。车辆包括第一检测单元、第二检测单元、第三检测单元和控制单元。控制单元从第一检测单元获得第一输入并确定后挡板是否处于伸出位置。当后挡板处于伸出位置时,控制单元还分别从第二检测单元和第三检测单元获得第二输入和第三输入。响应于获得第二输入和第三输入,控制单元识别后挡板伸出取向。另外,控制单元检测车辆后侧附近障碍物的存在,并基于后挡板伸出取向计算障碍物与后挡板顶侧之间的经校准距离。当经校准距离小于阈值时,控制单元通知车辆用户。
技术研发人员:马哈茂德·尤瑟夫·加纳姆,B·S·邦迪,穆罕纳德·安瓦尔·哈姆丹,C·韦格纳
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!