包括至少一个驻车制动器的制动系统的制作方法
背景技术:
技术实现思路
0、发明概要
1、因此,本申请的目标是提出一种不具有上述缺点的制动系统。
2、上述目标通过用于机动车辆的制动系统来实现,该制动系统包括至少一个旨在用于定位在车轮上的驻车制动器和旨在用于控制制动器以便提供驻车制动的控制单元,该控制单元被配置成使得响应于在用于施加驻车制动的第一请求之后的用于施加驻车制动的第二请求,控制单元发送改变制动水平的指令。
3、在实施例的一个示例中,第二请求由驾驶员制定,驾驶员认为,在预料到车辆的倾斜度相较于响应于第一请求而考虑的倾斜度发生改变时,驻车的制动水平应该增加。
4、在实施例的另一示例中,第二请求由控制单元制定,该控制单元预料到车辆的倾斜度可能改变(例如,如果例如经由卫星导航系统通知控制单元车辆停驻在船上)。涌浪可能改变车辆的驻车倾斜度。
5、有利地,第一和第二连续请求在给定的时间段内发出。
6、本发明的一个主题是一种用于机动车辆的制动系统,该制动系统包括至少一个旨在用于定位在车轮上的电驱动的驻车制动器、控制单元,该控制单元被配置为响应于第一请求,生成用于驻车制动器的、以第一强度施加驻车制动或中断驻车制动的施加的命令。控制单元还被配置为响应于在第一请求之后发出的第二请求,生成用于驻车制动器的、以第二强度施加驻车制动的命令。
7、在一个实施例中,第一请求和第二请求由机动车辆的驾驶员通过驱动驻车制动器控件来发出。
8、在实施例的另一个示例中,第一请求和第二请求由控制单元发出,第一请求是当机动车辆停车时自动驱动驻车制动器。
9、在实施例的另一个示例中,第一请求和第二请求中的一个由控制单元发出,而请求中的另一个请求由车辆的驾驶员发出。
10、根据附加特征,驻车制动器集成到行车制动器中,并包括电机减速齿轮。
11、本发明的另一个主题是包括四个车轮和根据本发明的制动系统的机动车辆,该制动系统包括两个驻车制动器,每个后车轮一个驻车制动器。
12、本发明的另一个主题是根据本发明的制动系统的操作方法,该制动系统是为机动车辆配备的,其中:
13、在机动车辆停驻在驻车空间(parking space)上之后,发出以第一强度启动驻车制动器的第一请求,
14、向驻车制动器发送命令,该驻车制动器以第一强度施加驻车制动力,
15、检测到驻车空间的可变倾斜度,
16、发送以第二强度施加驻车制动力的第二请求,
17、向驻车制动器发送命令,该驻车制动器以第二强度施加制动力。
18、在实施例的一个示例中,第一请求由驾驶员或控制单元发出,而第二请求由驾驶员发出。
19、在实施例的另一个示例中,第一请求由驾驶员或控制单元发送,而第二请求由控制单元发送。第二请求可以由控制单元在查询卫星导航系统之后发送。
技术特征:
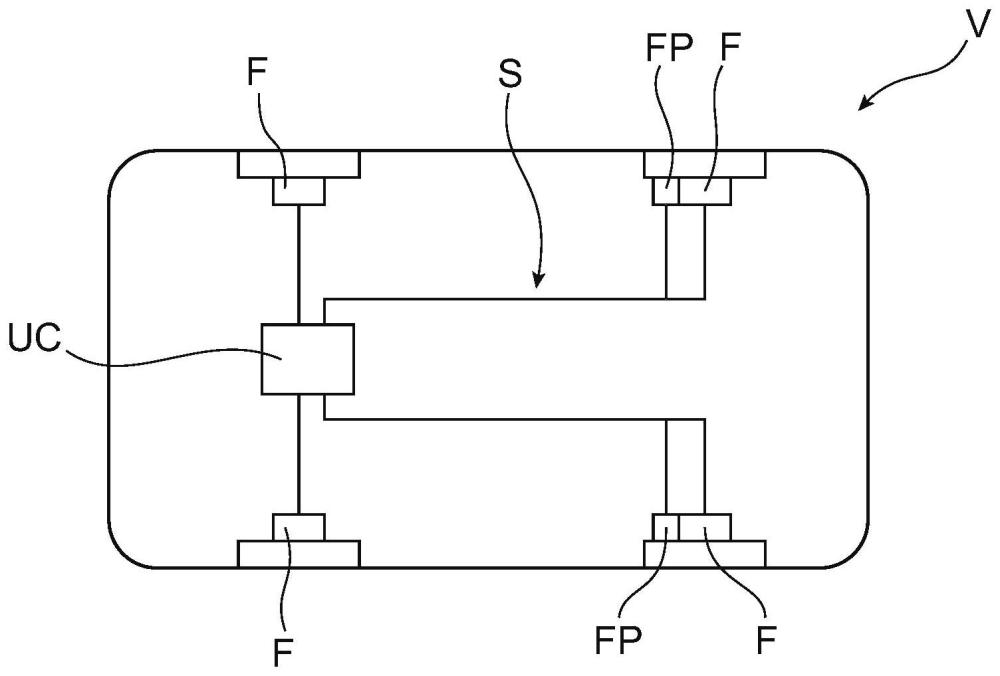
1.一种用于机动车辆的制动系统,所述制动系统包括用于固定所述车辆的至少一个驻车制动器(fp)、控制单元(uc),所述驻车制动器具有旨在用于定位在车轮上的电驱动装置,所述控制单元(uc)被配置为在对应于所述机动车辆的第一倾斜度的第一请求之后生成对于所述驻车制动器(fp)的命令,从而以第一强度(f1)施加驻车制动或中断驻车制动的施加,其中,所述控制单元(uc)还被配置为当预测到所述机动车辆的倾斜度相对于所述第一倾斜度的改变时,响应于在所述第一请求之后发出的第二请求生成对于所述驻车制动器(fp)的命令,从而以第二强度(f2)施加驻车制动。
2.根据权利要求1所述的制动系统,其中,所述第一请求和所述第二请求由所述机动车辆的驾驶员通过驱动驻车制动器控件来发出。
3.根据权利要求2所述的制动系统,其中,所述第一请求和所述第二请求由所述控制单元(uc)发出,所述第一请求是在所述机动车辆停车时自动驱动所述驻车制动器(fp)。
4.根据权利要求1所述的制动系统,其中,所述第一请求和所述第二请求中的至少一个由所述控制单元(uc)发出,而所述请求中的另一个请求由所述车辆的驾驶员发出。
5.根据权利要求1到4中的一项所述的制动系统,其中,所述驻车制动器(fp)集成到行车制动器中,并且包括电机减速齿轮。
6.一种机动车辆,其具有四个车轮和根据前述权利要求中的一项所述的制动系统,其中,所述制动系统具有两个驻车制动器(fp),每个后车轮一个所述驻车制动器(fp)。
7.一种关于制动系统的操作方法,所述制动系统是根据权利要求1至5中的一项所述的、安装到机动车辆的制动系统,其中:
8.根据权利要求7所述的操作方法,其中,所述第一请求由所述驾驶员或所述控制单元发出,而所述第二请求由所述驾驶员发出。
9.根据权利要求7所述的操作方法,其中,所述第一请求由所述驾驶员或所述控制单元发出,而所述第二请求由所述控制单元发出。
10.根据权利要求9所述的操作方法,其中,所述第二请求由所述控制单元在查询卫星导航系统之后发出。
技术总结
本申请涉及包括至少一个驻车制动器的制动系统。一种机动车辆制动系统,包括定位在车轮上的至少一个电驱动的驻车制动器(FP)、控制单元(UC),该控制单元(UC)被配置为在第一请求之后生成用于驻车制动器(FP)的、以第一强度施加驻车制动或中断驻车制动的施加的命令,其中控制单元(UC)还被配置为响应于在第一请求之后发出的第二请求,生成用于驻车制动器(FP)的、以第二强度施加驻车制动的命令。
技术研发人员:朱利安·萨索,马克西姆·德曼德雷,王维乔,亚历克斯·帕特劳卡尔奎奥
受保护的技术使用者:日立安斯泰莫法国公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!