弯道工况下自动紧急制动纵横向综合控制方法及系统
本发明涉及智能汽车制动控制领域,具体涉及一种弯道工况下自动紧急制动纵横向综合控制方法及系统。
背景技术:
1、在追尾事故中,31%的驾驶员没有采取适当的制动措施,20%的驾驶员没有及时制动,49%的驾驶员没有完全制动,而装有自动紧急制动(aeb)系统的汽车的追尾碰撞会减少约27%,自动紧急制动系统是帮助驾驶员避免和降低交通事故严重程度而开发的车辆控制系统,能识别即将发生的碰撞并通过自动启动制动器做出反应,可见,自动紧急制动对于避免碰撞来说尤为重要。
2、尽管利用自动紧急制动可以有效降低追尾碰撞率和追尾伤害碰撞率,但在弯道工况下,自动紧急制动系统的操作会导致弯道工况下的汽车横向偏移明显增加,存在与邻近车道车辆或路沿发生碰撞的潜在风险,容易引发交通事故,因此,需要一种弯道工况下自动紧急制动纵横向综合控制方法及系统,能够解决以上问题。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供弯道工况下自动紧急制动纵横向综合控制方法及系统,能够抑制弯道紧急制动过程中的横向偏移量,保证了车辆行驶安全。
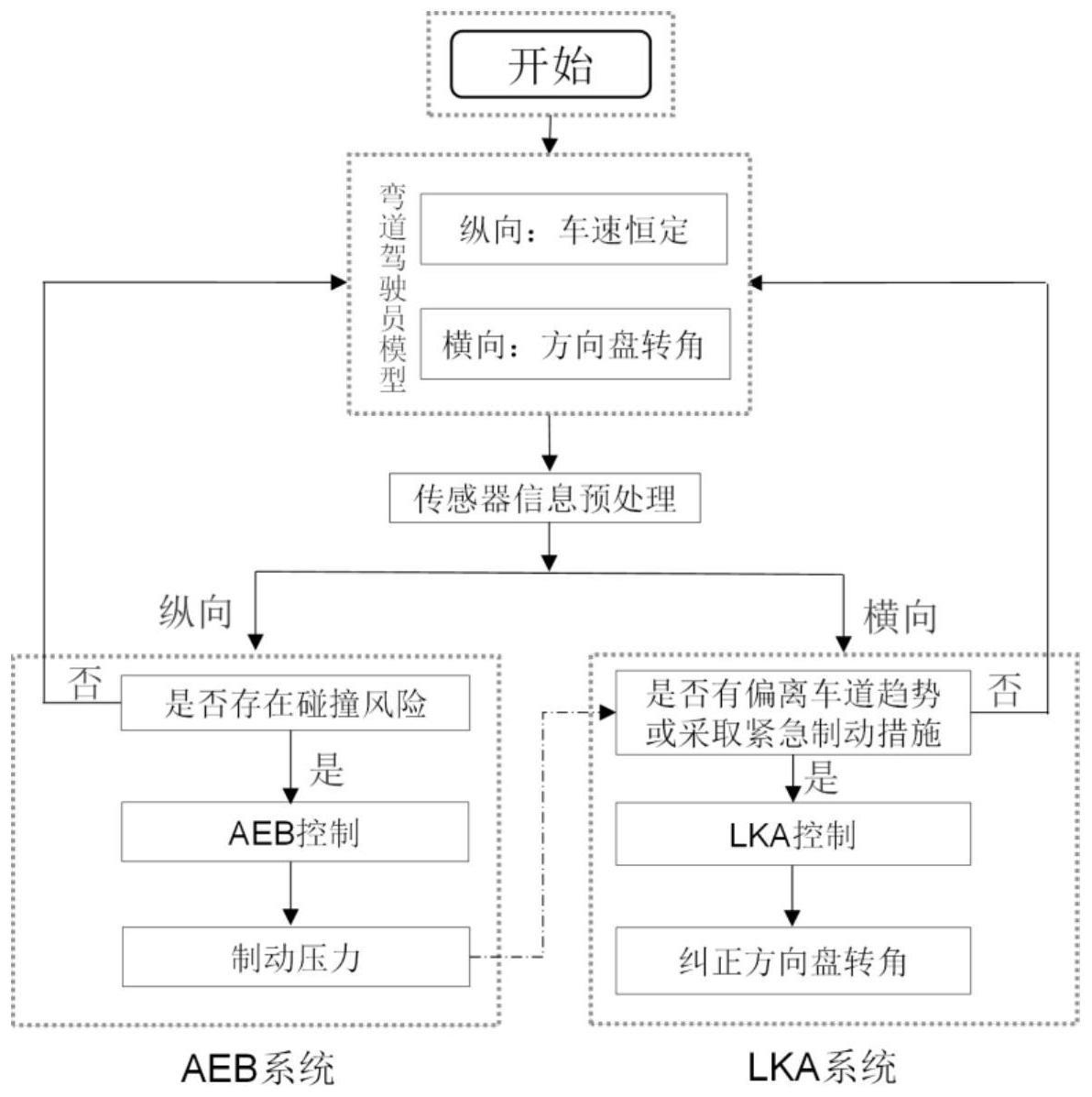
2、本发明的弯道工况下自动紧急制动纵横向综合控制方法,包括:
3、判断自车与前车是否存在碰撞风险,若是,则aeb系统进行制动控制;若否,则自车按照预计线路正常行驶;
4、判断自车是否有偏移出当前车道的趋势,若是,则lka系统主动介入,对方向盘转角进行相应调整,避免车辆冲出当前车道;若否,则lka系统不参与控制。
5、进一步,若自车与前车存在碰撞风险,则aeb系统进行制动控制,同时触发lka系统,使得lka系统主动介入,对方向盘转角进行相应调整,避免车辆冲出当前车道。
6、进一步,aeb系统通过如下方法进行制动控制:
7、若ttc>2.6s,则aeb系统不触发;
8、若1.6s<ttc≤2.6s,则aeb系统触发,并发出警报;
9、若0.6s<ttc≤1.6s,则aeb系统触发,使用40%的制动压力进行制动;
10、若ttc≤0.6s,则aeb系统触发,100%的制动压力进行制动;
11、其中,d表示自车与前车的相对距离,vrel表示自车与前车的相对速度。
12、进一步,自车按照预计线路正常行驶过程中,根据设定的方向盘转角进行行驶;
13、按照如下方法确定方向盘转角:
14、自车在弯道工况下沿着圆弧从当前位姿点a到达预瞄点c,将所述圆弧对应的圆心记为o,以自车当前位姿点a为切点作所述圆弧的切线,从圆心o引出直线,使得所述直线与所述切线相交后得到的交点b满足∠boa等于自车的前轮转角;
15、确定自车正常行驶过程中的前轮转角:
16、
17、其中,ey为自车当前位姿点a与预瞄点c在横向上的距离差;l为当前位姿点a与预瞄点c之间的距离;l为当前位姿点a与交点b之间的距离;β(t)为随时间t变化的前轮转角β;
18、根据前轮转角与方向盘转角之间的比例对应关系,基于前轮转角,计算得到方向盘转角。
19、进一步,对方向盘转角进行相应调整,具体包括:
20、以自车位置中心为质心,过所述质心作垂直于自车中轴线的直线ac,沿自车行驶方向,作平行于直线ac的直线bd,将直线bd与自车所处车道的左侧车道线的交点记为b′,将直线bd与自车所处车道的右侧车道线的交点记为d′,将直线bd与自车中轴线的交点记为k;
21、计算自车质心到达车道中心线上的预瞄点所需修正的角度β′:
22、
23、其中,l1为交点k与交点b′之间的距离,l2为交点k与交点d′之间的距离;
24、确定目标方向盘转角θ:
25、θ=k1α′+k2β′;
26、其中,k1以及k2均为设定系数,α′为自车偏航角;
27、在lka系统介入下,使得方向盘转角为目标方向盘转角θ。
28、一种弯道工况下自动紧急制动纵横向综合控制系统,包括aeb控制单元以及lka控制单元;
29、所述aeb控制单元,用于判断自车与前车是否存在碰撞风险,若是,则aeb系统进行制动控制;若否,则自车按照预计线路正常行驶;
30、所述lka控制单元,用于判断自车是否有偏移出当前车道的趋势,若是,则lka系统介入主动,对方向盘转角进行相应调整,避免车辆冲出当前车道;若否,则lka系统不参与控制。
31、进一步,若自车与前车存在碰撞风险,则aeb系统进行制动控制,同时触发lka系统,使得lka系统主动介入,对方向盘转角进行相应调整,避免车辆冲出当前车道。
32、进一步,aeb系统通过如下方法进行制动控制:
33、若ttc>2.6s,则aeb系统不触发;
34、若1.6s<ttc≤2.6s,则aeb系统触发,并发出警报;
35、若0.6s<ttc≤1.6s,则aeb系统触发,使用40%的制动压力进行制动;
36、若ttc≤0.6s,则aeb系统触发,100%的制动压力进行制动;
37、其中,d表示自车与前车的相对距离,vrel表示自车与前车的相对速度。
38、进一步,自车按照预计线路正常行驶过程中,根据设定的方向盘转角进行行驶;
39、按照如下方法确定方向盘转角:
40、自车在弯道工况下沿着圆弧从当前位姿点a到达预瞄点c,将所述圆弧对应的圆心记为o,以自车当前位姿点a为切点作所述圆弧的切线,从圆心o引出直线,使得所述直线与所述切线相交后得到的交点b满足∠boa等于自车的前轮转角;
41、确定自车正常行驶过程中的前轮转角:
42、
43、其中,ey为自车当前位姿点a与预瞄点c在横向上的距离差;l为当前位姿点a与预瞄点c之间的距离;l为当前位姿点a与交点b之间的距离;β(t)为随时间t变化的前轮转角β;
44、根据前轮转角与方向盘转角之间的比例对应关系,基于前轮转角,计算得到方向盘转角。
45、进一步,对方向盘转角进行相应调整,具体包括:
46、以自车位置中心为质心,过所述质心作垂直于自车中轴线的直线ac,沿自车行驶方向,作平行于直线ac的直线bd,将直线bd与自车所处车道的左侧车道线的交点记为b′,将直线bd与自车所处车道的右侧车道线的交点记为d′,将直线bd与自车中轴线的交点记为k;
47、计算自车质心到达车道中心线上的预瞄点所需修正的角度β′:
48、
49、其中,l1为交点k与交点b′之间的距离,l2为交点k与交点d′之间的距离;
50、确定目标方向盘转角θ:
51、θ=k1α′+k2β′;
52、其中,k1以及k2均为设定系数,α′为自车偏航角;
53、在lka系统介入下,使得方向盘转角为目标方向盘转角θ。
54、本发明的有益效果是:本发明公开的一种弯道工况下自动紧急制动纵横向综合控制方法及系统,一方面,通过aeb系统可实现纵向主动干预,以避免在前进方向发生碰撞;另一方面,通过车道保持辅助(lka)系统可实现横向主动干预,抑制制动过程中车辆的横向偏移,纵向上基于碰撞时间(ttc)的控制算法,横向上基于偏航角和预瞄点横向偏差的控制算法,从而避免与潜在的前方以及侧方的目标发生碰撞,降低了交通事故的发生,保证了驾驶过程的安全。
- 还没有人留言评论。精彩留言会获得点赞!