履带车辆轨迹预测方法、设备和介质与流程
本发明涉及交通控制,尤其涉及一种履带车辆轨迹预测方法、设备和介质。
背景技术:
1、随着自动驾驶技术的不断发展,车辆轨迹预测技术逐渐成为热点,自动驾驶算法根据预测轨迹信息进行自车的路径规划,对可能出现的危险情况进行决策,进行制动或发出告警,对提高自动驾驶安全性和稳定性具有重要的意义。
2、履带车辆是一种在民用和军用领域都用途广泛的特种车辆,自动驾驶技术在乘用车领域的快速发展推动了履带车辆智能化和无人化发展,但是目前在履带车辆的轨迹预测方面的研究较少,现有的针对履带车辆的轨迹预测方法,未考虑到履带车辆在转向时会发生滑动和车身航向的侧偏,导致履带车辆的预测轨迹精度低,从而给后续的决策和路径规划带来误差,降低了履带车辆自主控制的精度和安全性。
3、有鉴于此,特提出本发明。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种履带车辆轨迹预测方法、设备和介质,解决现有技术中未考虑到履带车辆在转向时会发生滑动和车身航向的侧偏所导致的预测轨迹精度低的问题,提高了履带车辆自主控制的精度和安全性。
2、本发明实施例提供了一种履带车辆轨迹预测方法,包括:
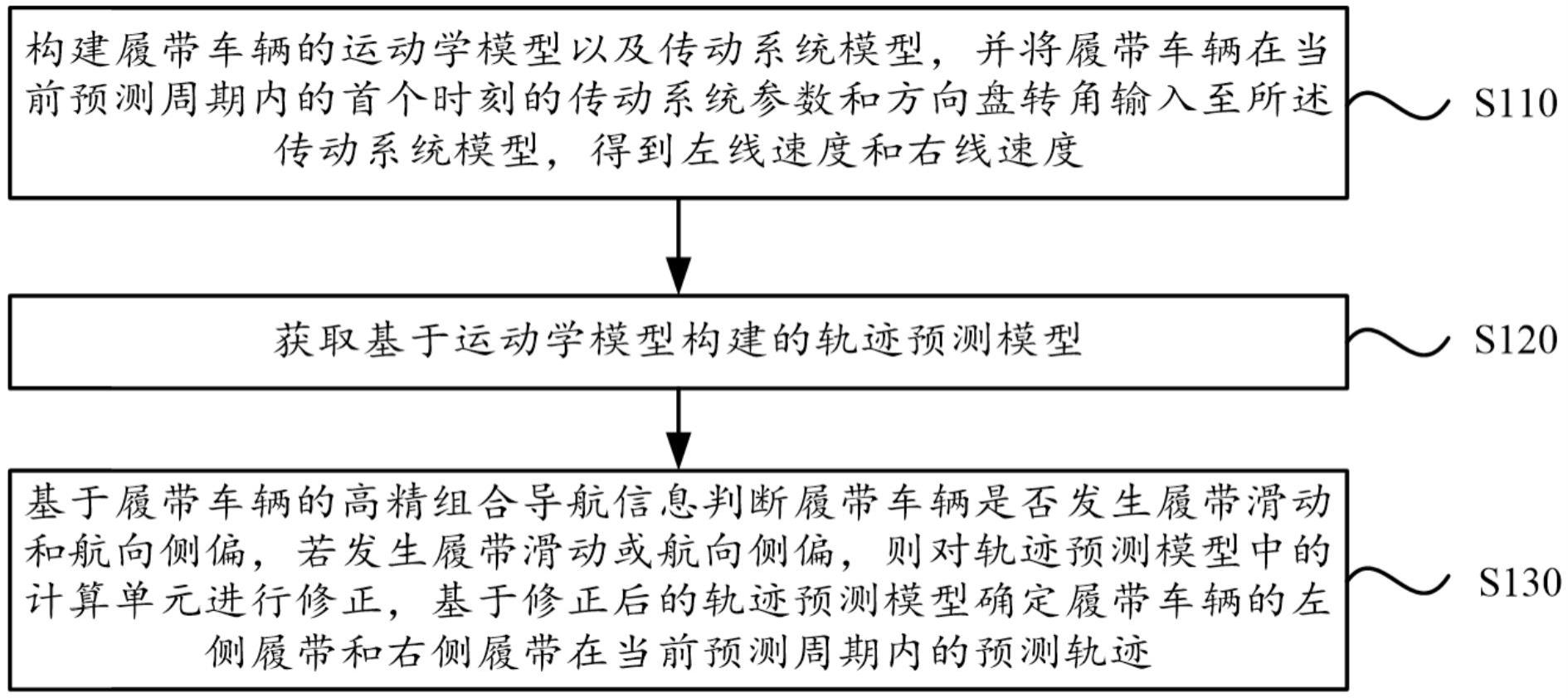
3、构建履带车辆的运动学模型以及传动系统模型,并将履带车辆在当前预测周期内的首个时刻的传动系统参数和方向盘转角输入至所述传动系统模型,得到左线速度和右线速度;
4、获取基于所述运动学模型构建的轨迹预测模型,其中,所述轨迹预测模型包括第一计算单元、第二计算单元以及第三计算单元,所述第一计算单元用于根据所述左线速度和所述右线速度确定预测横摆角速度和预测中心线速度,所述第二计算单元用于根据一个时刻的预测航向角和预测横摆角速度确定下一时刻的预测航向角,所述第三计算单元用于根据一个时刻的预测中心线速度、车辆位置、以及下一个时刻的预测航向角确定左侧履带和右侧履带在下一时刻的位置;
5、基于所述履带车辆的高精组合导航信息判断所述履带车辆是否发生履带滑动和航向侧偏,若发生履带滑动或航向侧偏,则对所述轨迹预测模型中的计算单元进行修正,基于修正后的轨迹预测模型确定所述履带车辆的左侧履带和右侧履带在所述当前预测周期内的预测轨迹。
6、本发明实施例提供了一种电子设备,所述电子设备包括:
7、处理器和存储器;
8、所述处理器通过调用所述存储器存储的程序或指令,用于执行任一实施例所述的履带车辆轨迹预测方法的步骤。
9、本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行任一实施例所述的履带车辆轨迹预测方法的步骤。
10、本发明实施例具有以下技术效果:
11、通过构建履带车辆的运动学模型以及传动系统模型,并将履带车辆在当前预测周期内的首个时刻的传动系统参数和方向盘转角输入至传动系统模型,得到左线速度和右线速度,进而获取基于运动学模型构建的轨迹预测模型,基于履带车辆的高精组合导航信息判断履带车辆是否发生履带滑动和航向侧偏,若发生滑动或侧偏,则对轨迹预测模型中的计算单元进行修正,进而根据修正后的轨迹预测模型确定左侧履带和右侧履带在当前预测周期内的预测轨迹,以考虑履带的滑动和车身航向的侧偏,结合高精度组合导航信息进行识别,对轨迹预测模型进行修正,使得修正后的模型的轨迹预测精度更高,得到更加真实的预测轨迹,解决了现有技术中未考虑到履带车辆在转向时会发生滑动和车身航向的侧偏所导致的预测轨迹精度低的问题,提高了履带车辆自主控制的精度和安全性。
技术特征:
1.一种履带车辆轨迹预测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述将履带车辆在当前预测周期内的首个时刻的传动系统参数和方向盘转角输入至所述传动系统模型,得到左线速度和右线速度,包括:
3.根据权利要求1所述的方法,其特征在于,所述高精组合导航信息包括所述履带车辆在所述当前预测周期内的首个时刻的实际横摆角速度、东向速度以及北向速度,基于所述履带车辆的高精组合导航信息判断所述履带车辆是否发生履带滑动,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述左相对速度、所述左线速度、所述右相对速度以及所述右线速度,判断所述履带车辆是否发生履带滑动,包括:
5.根据权利要求3所述的方法,其特征在于,所述对所述轨迹预测模型中的计算单元进行修正,包括:
6.根据权利要求1所述的方法,其特征在于,所述高精组合导航信息包括所述履带车辆在所述当前预测周期内的首个时刻的实际航向角、实际横摆角速度、东向速度以及北向速度,基于所述履带车辆的高精组合导航信息判断所述履带车辆是否发生航向侧偏,包括:
7.根据权利要求6所述的方法,其特征在于,所述对所述轨迹预测模型中的计算单元进行修正,包括:
8.根据权利要求1所述的方法,其特征在于,所述基于修正后的轨迹预测模型确定所述履带车辆的左侧履带和右侧履带在所述当前预测周期内的预测轨迹,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至8任一项所述的履带车辆轨迹预测方法的步骤。
技术总结
本发明涉及交通控制技术领域,公开了一种履带车辆轨迹预测方法、设备和介质,该方法包括:构建履带车辆的运动学模型以及传动系统模型,并将当前预测周期内的首个时刻的传动系统参数和方向盘转角输入至传动系统模型,得到左线速度和右线速度,进而获取基于运动学模型构建的轨迹预测模型,基于履带车辆的高精组合导航信息判断履带车辆是否发生履带滑动和航向侧偏,若发生滑动或侧偏,则对轨迹预测模型中的计算单元进行修正,进而根据修正后的轨迹预测模型确定左右侧履带在当前预测周期内的预测轨迹,以得到更加真实的预测轨迹,解决了现有技术中未考虑滑动和航向侧偏所导致的预测轨迹精度低的问题,提高了履带车辆自主控制的精度和安全性。
技术研发人员:王昭建,杨建森,张辉,张永康,郭少杰,吴德媛,郝剑虹,武振江
受保护的技术使用者:中汽研(天津)汽车工程研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!