自动驾驶横向控制方法、装置、设备及存储介质
本发明属于自动控制领域,特别涉及自动驾驶横向控制方法、装置、设备及存储介质。
背景技术:
1、目前,随着社会经济的不断发展、人们生活水平的普遍提高和机动车的快速增长,城市交通道路网饱和度将持续升高,交通拥堵问题日益严重,大力发展公共交通是缓解交通拥堵的重要手段,车辆自动驾驶技术的应用和智能化系统的升级对提升公交系统服务质量,提高公交运行效率起到了至关重要的作用。
2、控制执行技术是按照车辆智能决策输出的结果控制车辆的驾驶行为,保障车辆安全到达预定目标点的过程。车辆辆的控制执行技术包括横向控制和纵向控制,横向控制主要在保证安全与舒适的条件下控制车辆的转向,横向控制主要控制车辆的横向转角(即行驶转角),使车辆能够按照预定轨迹安全达到目的地。车辆的横向运动与纵向运动存在着耦合关系,采用横纵向综合控制方法需要精确的数学模型,这会使无人驾驶车辆控制问题变得复杂。
3、在低速行驶条件下,分别对横向控制和纵向控制单独设计控制器,也能达到较好的跟踪效果。当车辆在某些特定的行驶环境下,例如专用车道上行驶时,通常会忽略路上行人、其他车辆以及突发障碍物对车辆正常行驶造成干扰,相比于车辆纵向控制及其他影响条件,横向转角运动控制成为车辆能否正常运行的首要因素。
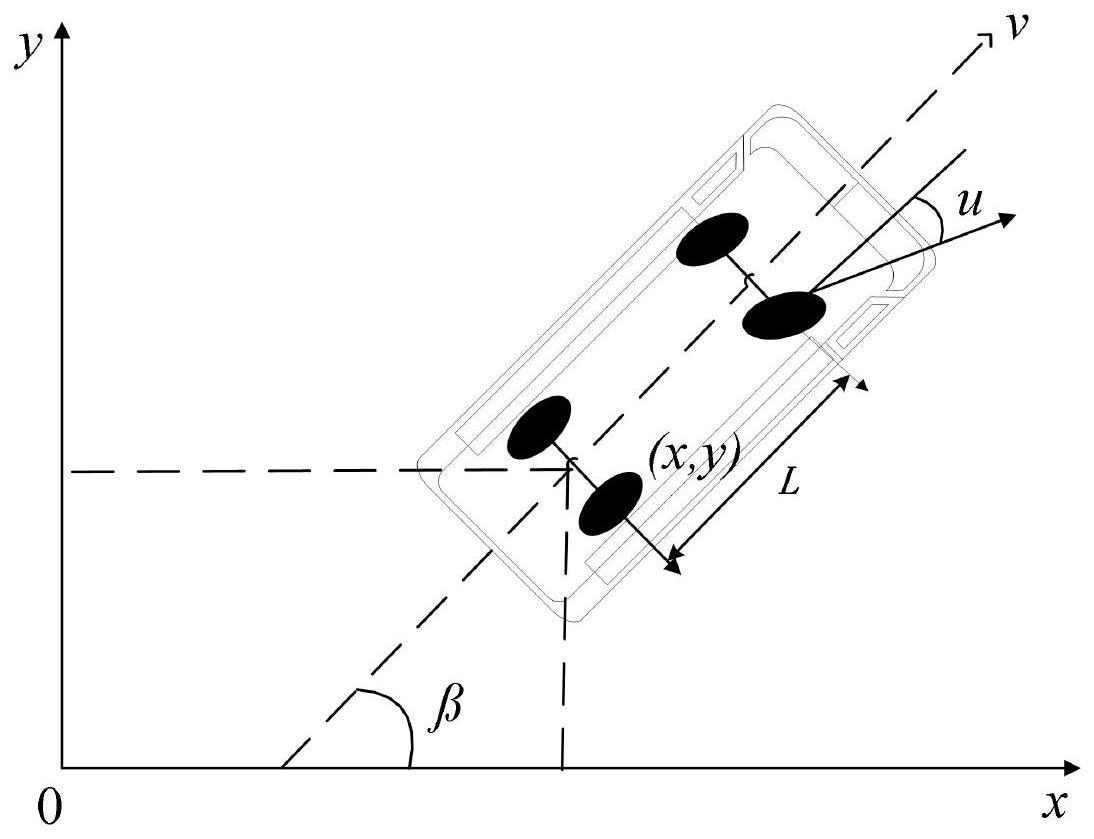
4、在大多数车辆运行研究中,涉及横向转角变化的车辆横向动力学过程的建立通常以时间为自变量、位置和横向转角为因变量。车辆是典型的四轮车辆,有两个后轮和两个前轮,一般情况下,后轮作为驱动轮,前轮作为转向轮。
5、因此,现在亟需自动驾驶横向控制方法、装置、设备及存储介质。
技术实现思路
1、本发明提出自动驾驶横向控制方法、装置、设备及存储介质,解决了现有技术中难以获取车辆横向动力学精确数学模型的情况下,无法实现横向转角精确控制的问题的问题。
2、本发明的技术方案是这样实现的:自动驾驶横向控制方法,所述方法包括如下步骤:
3、获取车辆当前时刻的横向转角以及期望转角,根据当前时刻的横向转角与期望转角计算当前时刻的横向转角误差,设计r-mfailc控制器,并构建r-mfailc控制器的控制表达式;
4、通过上一次迭代中下一时刻的横向转角误差作为所述r-mfailc控制器的输入量,利用所述r-mfailc控制器输出的本次迭代中当前时刻的方向盘转角输入量对车辆的横向转角进行控制。
5、r-mfailc控制器的控制表达式为
6、
7、
8、
9、其中,u(i,k)为本次迭代中车辆当前时刻的方向盘转角输入量,u(i-1,k)为上一次迭代中车辆当前时刻的方向盘转角输入量,为pg向量的估计值,βd(k+1)为车辆下一时刻的期望转角,βp(i-1,k+1)为上一次迭代中车辆下一时刻的横向转角,ep(i-1,k+1)=βd(k+1)-βp(i-1,k+1)为上一次迭代中车辆下一时刻的横向转角误差的误差,ρ2∈(0,1]使得控制算法拥有更好的适应性,d(k)为仅与时间k变化有关的可测量扰动。
10、作为一优选的实施方式,所述下一时刻的期望转角βd(k+1)的具体表达式为
11、
12、其中,k为车辆运行时刻,期望转角βd(k+1)为介于0~100时刻下的常数0和介于100~600时刻下的正弦函数。
13、作为一优选的实施方式,所述r-mfailc控制器的具体设计步骤为:
14、引入迭代轴i,并定义车辆横向运动的非线性离散时间动力学方程:
15、
16、其中,t是采样时间长度,i=1,2,…代表迭代次数,k∈{0,1,…,t}为采样时间,β(i,k)为本次迭代中车辆当前时刻的横向转角,β(i,k+1)为本次迭代中车辆下一时刻的横向转角(即预测横向转角),u(i,k)代表本次迭代中车辆当前时刻的方向盘转角输入量,l表示采样时间;
17、作为一优选的实施方式,所述r-mfailc控制器通过鲁棒无模型自适应迭代学习控制,通过构造鲁棒无模型自适应迭代学习r-mfailc控制器,具体表达式为:
18、
19、
20、
21、基于所述r-mfailc控制器,通过引入衰减因子与分段式动态线性化迭代学习律来构造r-mfailc控制器,使r-mfailc控制器能够实现对所需横向转角曲线的精确跟踪,从而提高自动驾驶车辆横向转角的控制精度。
22、作为一优选的实施方式,在实际运行中,利用所述r-mfailc控制器对车辆本次迭代中当前时刻的横向转角进行控制的具体实现过程包括,
23、若上一次迭代中下一时刻的横向测量转角β测(i-1,k+1)与下一时刻的期望转角βd(k+1)不相等,则将上一次迭代中下一时刻的横向转角误差e(i-1,k+1)传输给r-mfailc控制器,将所述r-mfailc控制器输出的上一次迭代中下一时刻的方向盘转角输入量u(i-1,k+1)传输给方向盘转角执行模块,控制方向盘的转角调整次数,并使自动驾驶车辆的转向系统得电产生本次迭代中下一时刻的横向转角输出信号β(i,k+1),将经过车载传感器测量得到的β测(i,k+1)与下一时刻的期望转角βq(k+1)进行比较,得到本次迭代中下一时刻的横向转角误差e(i,k+1),用以r-mfailc控制器的下一次迭代学习,以实现横向转角的调整。
24、作为一优选的实施方式,,利用所述r-mfailc控制器对车辆上一次迭代中下一时刻的横向转角进行控制的具体实现过程还包括:
25、若βd(k+1)=β测(i-1,k+1),则向方向盘转角执行模块发送正常报文;
26、若βd(k+1)>β测(i-1,k+1),则实际转角弧度过小,向方向盘转角执行模块发送增加方向盘转角报文;
27、若βd(k+1)<β测(i-1,k+1),则实际转角弧度过大,向方向盘转角执行模块发送减小方向盘转角报文。
28、自动驾驶横向控制装置,所述装置包括:
29、获取与计算单元,被配置为获取车辆当前时刻的横向转角以及期望转角,根据当前时刻的横向转角与期望转角计算当前时刻的转角误差;
30、s-mfailc控制器,被配置为根据车辆上一次迭代中下一时刻的横向转角误差计算上一迭代中下一时刻的方向盘转角输入量;
31、控制单元,被配置为根据所述r-mfailc控制器输出的上一次迭代中下一时刻的方向盘转角输入量以及上一次迭代中下一时刻的横向转角误差对车辆本次迭代中下一时刻的横向转角进行控制。
32、一种计算机可读存储介质,其上存储有计算机程序,其中,所述程序被处理器执行时实现如权利要求1~7中任一项所述的自动驾驶横向控制方法。
33、一种电子设备,所述电子设备包括:处理器和存储有计算机程序的存储器,所述处理器被配置为在运行计算机程序时执行如权利要求1~7中任一项所述的自动驾驶横向控制方法。
34、采用了上述技术方案后,本发明的有益效果是:在原有无模型自适应迭代学习控制器(mfailc控制器)的基础上,通过引入衰减因子1/(k2+1)来构造r-mfailc控制器,并通过设定误差阈值em来进行横向转角u(i,k)的分段式衰减因子控制方法,使r-mfailc控制器随着误差反馈信息的改变而做出相应的自适应变化,在处理可测量扰动对于控制器影响时,能够同时保留无模型自适应迭代学习控制算法不需要被控对象精确的数学模型,只需要输入输出信息的优势,使r-mfailc控制器能够实现对所需横向转角曲线的精确跟踪,提高了公交车横向转角的控制精度。
- 还没有人留言评论。精彩留言会获得点赞!