防止车辆碰撞的装置和方法与流程
本公开的示例性实施例涉及一种用于防止车辆碰撞的装置和方法,并且更具体地,涉及一种用于防止车辆碰撞的装置和方法,其防止自主车辆与在停止状态下的前车的前车之间的碰撞,如果前车改变车道以避免与已经在停止的状态下前车的前车发生碰撞。
背景技术:
1、由于车辆数量的增加,道路上每个路段的拥挤现象也随之增加。如果驾驶员没有与前车保持一定的距离,则有发生轻微车祸的危险。因此,驾驶员在与前车保持一定距离的同时,可以根据情况适当操纵刹车和油门,防止事故发生。但是,如果驾驶员长时间重复此类操作而变得更加疲劳,由于驾驶员的注意力的降低,发生事故的可能性也会增加。
2、最近,已知一种使用非接触式感测器,例如雷达或超声波感测器,或图像处理来对前车进行检测的技术。这项技术在安全驾驶方面是有效的,因为它用于自适应巡航控制(agc)驾驶车辆的车辆距离控制,通常,是对车辆驾驶员的警告。这种技术包括基于对前车的检测来控制自主车辆和前车之间距离的一种系统。通常,在该技术中,基于与前车的距离和安装在车辆上的车辆间距离检测感测器检测到的相对速度,计算出自主车辆的适当加速/减速状态后,通过控制节气门、制动器和变速器来识别准确的目标,保持适当的车辆间距离。
3、2015年6月3日公布的公开号为10-2015-0060301发明名称为“基于v2x的安全驾驶辅助服务的警报装置和方法”的韩国专利申请公开了本公开的背景技术。
技术实现思路
1、传统的防止车辆碰撞的方法限于自主车辆和前车之间存在碰撞。因此,这不足以防止自主车辆与前车的前车发生碰撞,如果前车突然改变车道以避免与前车的前车发生碰撞,所述前车的前车已经处在停止的状态下。
2、各种实施例旨在提供一种用于防止车辆碰撞的装置和方法,其防止自主车辆与停止的状态下的前车的前车发生碰撞,如果前车改变车道以避免与所述已经处在停止的状态下的前车的前车发生碰撞。
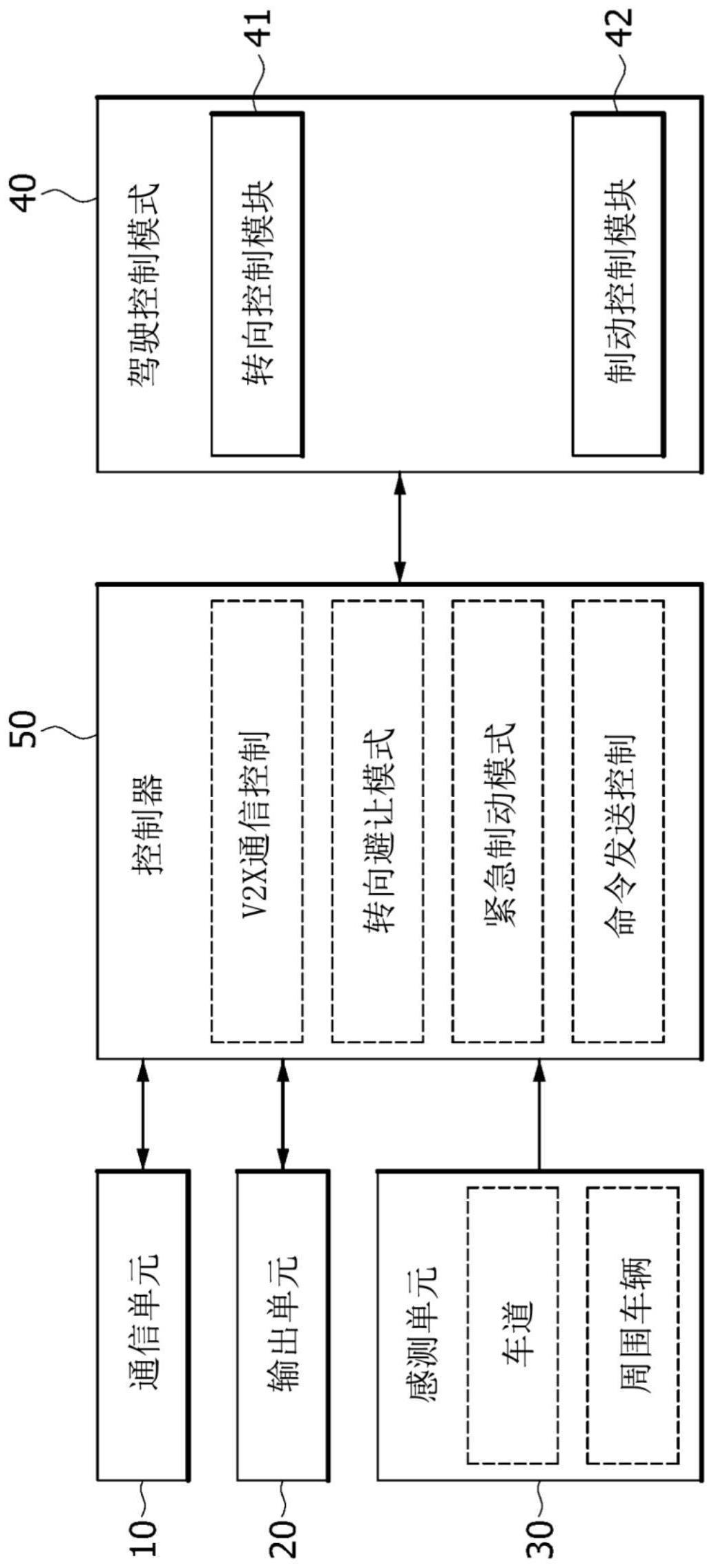
3、在一实施例中,一种用于防止车辆碰撞的装置包括:通信单元,配置为与周围车辆进行无线通信;感测单元,配置为检测周围车辆和车道;驾驶控制模块,配置为控制自主车辆进行转向或制动,以及控制器,配置为基于通过所述通信单元接收到的前车的驾驶模式信息,通过所述感测单元确定所述自主车辆是否能够朝向相邻车道进行转向避让驾驶,基于所述确定结果,如果通过所述通信单元检查到所述前车的前车处于停止状态,通过所述驾驶控制模块控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动。
4、在一实施例中,基于所述前车是否在自动驾驶模式下进行转向避让驾驶,所述控制器控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动。
5、在一实施例中,所述控制器控制所述自主车辆朝向相邻车道进行转向避让驾驶并同时通过所述前车的转向避让轨迹,实时地校正所述自主车辆的转向避让轨迹,如果所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行转向避让驾驶的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,不能朝向相邻车道进行转向避让驾驶。
6、在一实施例中,控制器可以控制自主车辆朝向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制自主车辆进行紧急制动,如果通过所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,不能朝向相邻车道进行转向避让驾驶。
7、在一实施例中,所述控制器控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动,如果能在手动驾驶模式下对所述前车进行强制控制。
8、在一实施例中,所述控制器基于所述前车与所述前车的前车之间的碰撞可能性,向所述前车发送强制转向的控制命令,并控制所述自主车辆朝向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在能在手动驾驶模式下对所述前车进行强制控制的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定所述前车,在能在手动驾驶模式下对所述前车进行强制控制的状态下,不能朝向相邻车道进行转向避让驾驶。
9、在一实施例中,所述控制器将所述强制转向控制命令发送给所述前车,如果前车在所述前车与所述前车的前车之间的碰撞限制时间上限内没有进行转向避让驾驶。
10、在一实施例中,所述控制器向前车发送碰撞警告命令,并控制所述自主车辆向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在不能在手动驾驶模式下对所述前车进行强制控制的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定所述前车,在不能在手动驾驶模式下对所述前车进行强制控制的状态下,不能朝向相邻车道进行转向避让驾驶。
11、在一实施例中,一种防止车辆碰撞的方法包括:由控制器通过通信单元检查前车的前车是否处于停止状态;由所述控制器通过所述通信单元接收所述前车的驾驶信息,如果通过所述通信单元检查所述前车的前车处于停止状态,并由所述控制器,基于通过所述通信单元接收到的前车的驾驶模式信息,通过感测单元确定自主车辆是否能够朝向相邻车道进行转向避让驾驶,基于所述确定结果,如果通过所述通信单元检查到所述前车的前车处于停止状态,通过所述驾驶控制模块控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动。
12、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,基于所述前车是否在自动驾驶模式下进行转向避让驾驶,所述控制器控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动。
13、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,所述控制器可以控制所述自主车辆朝向相邻车道进行转向避让驾驶并同时通过所述前车的转向避让轨迹,实时地校正所述自主车辆的转向避让轨迹,如果所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行转向避让驾驶的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,不能朝向相邻车道进行转向避让驾驶。
14、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,所述控制器可以控制自主车辆朝向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制自主车辆进行紧急制动,如果通过所述感测单元确定所述自主车辆,在所述前车在自动驾驶模式下进行紧急制动的状态下,不能朝向相邻车道进行转向避让驾驶。
15、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,所述控制器可以控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动,如果能在手动驾驶模式下对所述前车进行强制控制。
16、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,所述控制器可以基于所述前车与所述前车的前车之间的碰撞可能性,向所述前车发送强制转向的控制命令,并控制所述自主车辆朝向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在能在手动驾驶模式下对所述前车进行强制控制的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定所述前车,在能在手动驾驶模式下对所述前车进行强制控制的状态下,不能朝向相邻车道进行转向避让驾驶。
17、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动中,所述控制器可以将所述强制转向控制命令发送给所述前车,如果前车在所述前车与所述前车的前车之间的碰撞限制时间上限内没有进行转向避让驾驶。
18、在一实施例中,在所述控制所述自主车辆朝向相邻车道进行转向避让驾驶或紧急制动时,所述控制器可以向前车发送碰撞警告命令,并控制所述自主车辆朝向相邻车道进行转向避让驾驶,如果通过所述感测单元确定所述自主车辆,在不能在手动驾驶模式下对所述前车进行强制控制的状态下,能够朝向相邻车道进行转向避让驾驶;以及控制所述自主车辆进行紧急制动,如果通过所述感测单元确定所述前车,在不能在手动驾驶模式下对所述前车进行强制控制的状态下,不能朝向相邻车道进行转向避让驾驶。
- 还没有人留言评论。精彩留言会获得点赞!