自动驾驶车辆零偏角在线学习方法、前后轮转角学习方法及系统与流程
本发明涉及车辆转向零偏角学习领域,具体涉及一种自动驾驶车辆零偏角在线学习方法、前后轮转角学习方法及系统。
背景技术:
1、四轮转向(four wheel steering,4ws)车辆可实现前轮、后轮同向或反向独立控制,达到减小转弯半径、提高车身稳定性的目的。四轮转向系统的工作方式有机械式、液压式和电动式等实现方式,对于运矿式自动驾驶车辆多采用液压转向方式,随着机械结构磨损老化、传感器受环境的影响可能导致转向系统零偏角发生变化。
2、有人驾驶车辆可通过直线行驶时跑偏来判断转向系统异常,通过人为补偿保证车辆正常行驶。而自动驾驶车辆对于车辆零偏角的改变没有有效检测手段,小变化时会影响控制精度,变化大时可能会出现安全事故,尤其对于四轮转向车辆存在前后两个轴的零偏角,要想实时、准确获取其值会更加困难。
技术实现思路
1、为了克服上述现有技术中存在的缺陷,本发明的目的是提供一种自动驾驶车辆零偏角在线学习方法、前后轮转角学习方法及系统。
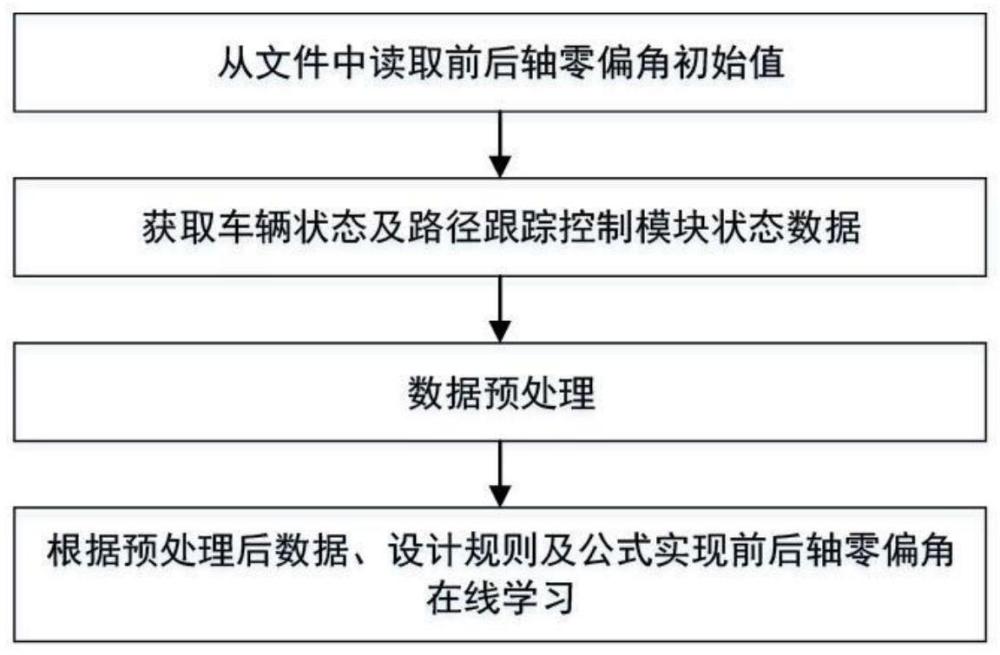
2、为了实现本发明的上述目的,本发明提供了一种自动驾驶车辆零偏角在线学习方法,包括以下步骤:
3、获取车辆的前后轴零偏角初始值;
4、实时获取车辆状态数据、参考轨迹曲率、横向位置偏差和航向角偏差;
5、响应于实时的车辆状态数据与设定值之间的大小关系根据实时的横向位置偏差进行前轴零偏角的在线学习,得到实时的前轴零偏角,根据实时的航向角偏差进行后轴零偏角的在线学习,得到实时的后轴零偏角。
6、该方法利用自动驾驶车辆控制过程中的横向位置偏差、航向角偏差实现了四轮转向自动驾驶车辆的前后轴零偏角的在线学习。
7、该自动驾驶车辆零偏角在线学习方法的一种可选方案:响应于实时的车速、实时的曲率、实时的前后轮实际转角与各自对应设定值的大小关系根据实时的横向位置偏差进行前轴零偏角的在线学习,根据实时的航向角偏差进行后轴零偏角的在线学习。
8、该自动驾驶车辆零偏角在线学习方法的一种可选方案:前轴零偏角学习步骤为:
9、响应于实时的车速大于设定车速值、实时的曲率绝对值小于设定曲率值且实时的前后轮实际转角的绝对值均小于设定转角值,根据所述实时的横向位置偏差迭代更新前轴零偏角;
10、响应于以下任一条件:实时的车速不大于设定车速值,实时的曲率绝对值不小于设定曲率值,实时的前轮实际转角的绝对值、实时的后轮实际转角的绝对值均不小于设定转角值;将上一时刻的前轴零偏角作为当前时刻的前轴零偏角。
11、该可选方案学习到的前轴零偏角精度高,计算速度快,实时高。
12、该自动驾驶车辆零偏角在线学习方法的一种可选方案:后轴零偏角学习步骤为:
13、定义长度为n的缓存队列q,响应于实时的车速大于设定车速值、实时的曲率绝对值小于设定绝对值,将实时的航向角偏差存入缓存队列q,否则清空缓存队列q;
14、响应于缓存队列q的元素达到设定个数,计算缓存队列q的均值及标准差;
15、响应于实时的车速大于设定车速值、实时的曲率绝对值小于设定绝对值且实时的前后轮实际转角的绝对值均小于设定转角绝对值,根据缓存队列q的均值及标准差迭代更新所述后轴零偏角。
16、该可选方案学习到的后轴零偏角精度高,计算速度快,实时高。
17、该自动驾驶车辆零偏角在线学习方法的一种可选方案:计算缓存队列q的均值及标准差时,根据上一时刻的缓存队列q的均值及标准差递推更新当前时刻的缓存队列q的均值及标准差。
18、该可选方案提高了计算速度,减少了cpu的资源消耗。
19、该自动驾驶车辆零偏角在线学习方法的一种可选方案:响应于实时的前轴零偏角和/或后轴零偏角的绝对值超过设定的阈值,上报转向系统故障。
20、该可选方案提升了自动驾驶车辆的安全性。
21、本申请还提出了一种自动驾驶车辆的前后轮转角学习方法,根据上述的自动驾驶车辆零偏角在线学习方法得到到实时的前轴零偏角和后轴零偏角,根据该前轴零偏角和后轴零偏角对路径跟踪控制模块实时计算得到的转向控制指令进行补偿,得到补偿后的前后轮转角。
22、本方法将前后轴的零偏角对路径跟踪控制模块指令进行补偿,提高了控制精度以及控制算法的鲁棒性。
23、本申请还提出了一种自动驾驶车辆零偏角在线学习系统,包括数据获取模块、处理模块和存储模块,所述数据获取模块从车载传感器以及路径跟踪控制模块获取车辆状态数据、参考轨迹曲率、横向位置偏差和航向角偏差,并传输至所述处理模块,所述处理模块与存储模块通信连接,所述存储模块存储有至少一个可执行指令,所述可执行指令使所述处理模块根据从数据获取模块得到的数据,执行如上述的自动驾驶车辆零偏角在线学习方法对应的操作,得到车辆实时的前轴零偏角和后轴零偏角。
24、该系统具备自动驾驶车辆零偏角在线学习方法的所有优点。
25、本发明还提出了一种自动驾驶车辆的前后轮转角学习系统,包括如上述的自动驾驶车辆零偏角在线学习系统,所述处理模块与路径跟踪控制模块连接,路径跟踪控制模块获取处理模块学习到的前轴零偏角和后轴零偏角,并基于该前轴零偏角和后轴零偏角对路径跟踪控制模块计算得到的转向控制指令进行补偿,得到补偿后的前后轮转角。
26、该系统具备上述自动驾驶车辆的前后轮转角学习方法的所有优点。
27、本申请还提出了一种自动驾驶车辆,包括上述的自动驾驶车辆的前后轮转角学习系统和车辆转向控制模块,所述车辆转向控制模块获取路径跟踪控制模块得到的补偿后的前后轮转角,直接作用于车辆转向,或获取路径跟踪控制模块得到的车辆的左前轮、右前轮、左后轮、右后轮的转角作用于车辆转向。
28、本发明的有益效果是:本发明可准确、快速的学习到车辆的零偏角,具有实时性,并可随着车辆的零偏角的改变而自动学习更新,保证了控制的精度及控制算法的鲁棒性;同时根据学习到的车辆的零偏角对路径跟踪控制模块计算得到的转向控制指令进行补偿,即使零偏角发生改变也能保证自动驾驶车辆的可靠安全运行,提升工作效率、降低维护成本。
29、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种自动驾驶车辆零偏角在线学习方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自动驾驶车辆零偏角在线学习方法,其特征在于,响应于实时的车速、实时的曲率、实时的前后轮实际转角与各自对应设定值的大小关系根据实时的横向位置偏差进行前轴零偏角的在线学习,根据实时的航向角偏差进行后轴零偏角的在线学习。
3.根据权利要求1或2所述的自动驾驶车辆零偏角在线学习方法,其特征在于,前轴零偏角学习步骤为:
4.根据权利要求1或2所述的自动驾驶车辆零偏角在线学习方法,其特征在于,后轴零偏角学习步骤为:
5.根据权利要求4所述的自动驾驶车辆零偏角在线学习方法,其特征在于,计算缓存队列q的均值及标准差时,根据上一时刻的缓存队列q的均值及标准差递推更新当前时刻的缓存队列q的均值及标准差。
6.根据权利要求1所述的自动驾驶车辆零偏角在线学习方法,其特征在于,响应于实时的前轴零偏角和/或后轴零偏角的绝对值超过设定的阈值上报转向系统故障。
7.一种自动驾驶车辆的前后轮转角学习方法,其特征在于,根据权利要求1-6任一项所述的自动驾驶车辆零偏角在线学习方法得到实时的前轴零偏角和后轴零偏角,根据该前轴零偏角和后轴零偏角对路径跟踪控制模块实时计算得到的转向控制指令进行补偿,得到补偿后的前后轮转角。
8.一种自动驾驶车辆零偏角在线学习系统,其特征在于,包括数据获取模块、处理模块和存储模块,所述数据获取模块从车载传感器以及路径跟踪控制模块获取车辆状态数据、参考轨迹曲率、横向位置偏差和航向角偏差,并传输至所述处理模块,所述处理模块与存储模块通信连接,所述存储模块存储有至少一个可执行指令,所述可执行指令使所述处理模块根据从数据获取模块得到的数据,执行如权利要求1-6任一项所述的自动驾驶车辆零偏角在线学习方法对应的操作,得到车辆实时的前轴零偏角和后轴零偏角。
9.一种自动驾驶车辆的前后轮转角学习系统,其特征在于,包括如权利要求7所述的自动驾驶车辆零偏角在线学习系统,所述处理模块与路径跟踪控制模块连接,路径跟踪控制模块获取处理模块学习到的前轴零偏角和后轴零偏角,并基于该前轴零偏角和后轴零偏角对路径跟踪控制模块计算得到的转向控制指令进行补偿,得到补偿后的前后轮转角。
10.一种自动驾驶车辆,其特征在于,包括权利要求9所述的自动驾驶车辆的前后轮转角学习系统和车辆转向控制模块,所述车辆转向控制模块获取路径跟踪控制模块得到的补偿后的前后轮转角,直接作用于车辆转向,或获取路径跟踪控制模块得到的车辆的左前轮、右前轮、左后轮、右后轮的转角作用于车辆转向。
技术总结
本发明提出了一种自动驾驶车辆零偏角在线学习方法、前后轮转角学习方法及系统。该自动驾驶车辆零偏角在线学习方法为:获取车辆的前后轴零偏角初始值;实时获取车辆状态数据、参考轨迹曲率、横向位置偏差和航向角偏差;响应于实时的车辆状态数据与设定值之间的大小关系根据实时的横向位置偏差进行前轴零偏角的在线学习,得到实时的前轴零偏角,根据实时的航向角偏差进行后轴零偏角的在线学习,得到实时的后轴零偏角。该方法利用自动驾驶车辆控制过程中的横向位置偏差、航向角偏差实现了前后轴零偏角的在线学习。
技术研发人员:曾伟,李焱,罗哲,周琳,王旭东
受保护的技术使用者:新驱动重庆智能汽车有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!