一种轮履复合变形轮及可升降轮履足复合主动悬架底盘
本发明涉及轮履复合变形轮,尤其涉及一种轮履复合变形轮及可升降轮履足复合主动悬架底盘。
背景技术:
1、履带车抓地力好,在冰雪草地泥地等恶劣地形的适用性相比轮式车更好,但履带车摩擦高,相比轮式车在路况较好的路段磨损快,能耗高。轮式底盘车辆在路况较好的情况下速度快,能耗小,但通过性较差。足式底盘通过性好但行驶速度慢。对于传统特种车辆轮式车和履带车,在路况较好路段的行驶性能和在恶劣地形的通过性能难以兼顾。为了解决该问题有研究机构设计了一种三角轮履复合系统底盘,如图1所示,在路况较好的路面行驶时以轮胎形态行驶,在雪地沙地泥地等恶劣路况时,轮履复合变形轮通过变形装置变为履带装置行走系统从而提升通过性能。但现存轮履复合变形轮结构复杂,质量较大,受结构限制接近角较小,通过性能并不理想,并不能满足特种车辆对于复杂恶劣地形高通过性的需求。因此,如今急需一套全新的高通过性的轮履足复合变形轮底盘。
技术实现思路
1、为克服现有轮履复合变形轮结构复杂,质量较大,受结构限制接近角较小,对复杂恶劣地形的通过性能不理想的技术缺陷,本发明提供了一种轮履复合变形轮及可升降轮履足复合主动悬架底盘。
2、本发明提供了一种轮履复合变形轮,包括履带、主体支撑部和双向伸缩驱动组件,主体支撑部包括四块子支撑模块,四块子支撑模块首尾依次铰接形成外侧用于安装履带的封闭环架,变形模块安装至封闭环架内侧用于驱动封闭环架变形以使履带呈现圆形和椭圆形两种工作状态;双向伸缩驱动组件的两个伸缩端分别与封闭环架上相对的两个铰接点相铰接,双向伸缩驱动组件的两个伸缩端还分别安装有用于驱动履带转动的驱动模块,驱动模块包括与履带啮合且使履带张紧的主动轮。
3、四块支撑模块组合形成的封闭环架作为履带的安装架,其中相邻支撑模块之间相铰接,便于封闭环架变换不同的形状。双向伸缩驱动组件用于驱动封闭环架进行变形,封闭环架的外壁可被撑为圆形或者被撑为类似椭圆形,此时,安装至封闭环架外围的履带被双向伸缩驱动组件支撑为圆形和椭圆形,双向伸缩驱动组件也是变形轮的轮辐,双向伸缩驱动组件的长度方向与变形轮的径向一致。双向伸缩驱动组件具体工作时,相对的两个伸缩端可同时伸长或回缩,当双向伸缩驱动组件缩短至最短长度时,所述轮履复合变形轮可作为圆形车轮使用,履带与封闭环架之间不发生相对运动,当双向伸缩驱动组件伸长至最长长度时,所述轮履复合变形轮为椭圆形,此时履带与封闭环形之间发生相对运行,履带在主动轮的驱动下,可进行转动。
4、优选的,子支撑模块包括两组呈镜像布置的支撑板组件,两组支撑板组件之间通过多根尼龙定距支柱固定连接,支撑板组件包括两块结构相同且重叠的异形板,两块异形板固定连接,两块异形板上方向相反的端部分别向外延伸有铰接耳板,相邻子支撑模块之间的铰接耳板相互搭接且通过铰接轴相连接。在尼龙定距支柱的支撑下,两组支撑板组件平行固定设置,每块支撑板组件均由两块板相叠而成,相邻支撑板组件通过铰接耳板铰接后,相邻的两块支撑板组件位于同一平面内,因此四块子支撑模块中相互搭接的支撑板组件均位于同一平面内。这样设置使得四块子支撑模块组成的主体支撑部在变形同时还能起到稳定的支撑作用。相邻子支撑模块之间通过铰接耳板连接时,连接孔设置有垫圈,铰接轴具体可为塞钉或其他结构。
5、优选的,异形板的外棱边为圆弧形,内棱边为直线形,四块子支撑模块组成的封闭环架的外圈可变形为圆形。当四块子支撑模块组成的封闭环架变的外圈形为圆形时,其内圈为正方形,这样设置结构较为合理。异形板的形状可以根据实际需求进行变换,比如其内圈可设置为其他形状。
6、优选的,同一块支撑板组件的两块异形板分别为铝支撑板和碳纤维支撑板,支撑板组件上沿其圆弧形边缘均匀穿置有多组履带支撑轴承,履带支撑轴承与履带的内侧壁滚动配合。履带支撑轴承不仅起到支撑履带的作用,还用于张紧履带。其中铝支撑板上开有多个减重孔,本发明采用铝和碳纤维作为支撑板是为了减重同时保证强度,并不是变形轮必须采用这两种材料,异形板也可以根据需要替换为其他材质。
7、优选的,双向伸缩驱动组件包括双向伸缩组件和驱动组件,双向伸缩组件包括限位框体和呈镜像布置的两块长条形伸缩结构,长条形伸缩结构包括两块结构相同且位于同一平面上的圆廓支撑板,圆廓支撑板的长度方向上延伸有两条相互平行且间隔的插条,两块圆廓支撑板上的插条相对插接配合后使两块圆廓支撑板呈中心对称,且两块圆廓支撑板形成的中心对称图形整体中间形成与插条长度方向一致的长条形窗口,两块长条形伸缩结构中位于同一端部的圆廓支撑板之间通过多根定位柱固定连接,限位框体安装至两块长条形伸缩结构中与插条位置对应的外侧,限位框体包括两块纵向导向板和两块分别与圆廓支撑板板面平行的导向侧板,两块导向侧板相对的内侧分别固定连接有两块间隔设置且卡入对应长条形窗口中的导向块,导向块与长条形窗口上下的插条滑动配合,两块纵向导向板分别固定连接至两块导向侧板的顶部和底部之间;其中一块导向侧板的外侧固定连接有变形驱动电机以及变形减速机,变形减速机上连接有布置在两块导向侧板之间的齿轮轴,齿轮轴穿过两个长条形窗口,两块长条形伸缩结构之间的齿轮轴上固定连接有两个主动齿轮,同一长条形伸缩结构中的两块圆廓支撑板的插条上分别固定连接有同时与其中一个主动齿轮啮合的上下两根齿条,两个主动齿轮分别用于驱动不同长条形伸缩结构中的两块圆廓支撑板同时进行伸缩运动。进一步优选的,双向伸缩驱动组件还可以设置为固定端相连,活动端分别朝向相反两端的两根伸缩油缸,驱动履带转动的驱动模块分别安装至两根伸缩油缸的活动端。
8、其中,圆廓支撑板均由三层板紧固连接而成,两块圆廓支撑板通过各自延伸的两条插条相互插接,且两块圆廓支撑板能沿着插条的长度方向来回运动,两条齿条分别固定连接至同一长条形伸缩结构的两块圆廓支撑板上,且两块齿条分别一上一下且齿部相对,由于两块长条形伸缩结构是呈镜像布置的,所以两条长条形伸缩结构的同一端部的圆廓支撑板的结构也是相同且对应的,通过定位柱能够将两条长条形伸缩结构上同一端部的两块圆廓支撑板固定连接,伸缩时也是同时运动,定位柱可为尼龙螺柱,限位框体安装至两条长条形伸缩结构的外侧,其中限位框体的纵向导向板对两块长条形伸缩结构在上下方向起限位作用,避免长条形伸缩结构上下位移,限位框体的导向侧板分别位于两条长条形伸缩结构的前后侧,对两块长条形伸缩结构在前后方向起限位作用,避免长条形伸缩结构前后位移,具体的,导向侧板可由碳纤维板和外部连接板组成,其中碳纤维板贴紧长条形伸缩结构的外侧,外部连接板紧固连接至碳纤维板的侧壁上;导向侧板内侧固定连接的导向块能嵌装在两块圆廓支撑板插接后形成的长条形窗口中,导向块也能够避免长条形伸缩结构上下位移,能起到导向作用,使插接的两块圆廓支撑板沿着插条长度方向移动,插条的长度方向即沿左右方向布置;即纵向导向板和导向块共同组成滑槽,使圆廓支撑板能形成的滑槽内滑动。与导向块连接的导向侧板上均还有用于安装齿轮轴的通孔,两块导向块间隔设置,导向块中间用于穿置齿轮轴,驱动电机通过变形减速机增扭驱动齿轮轴转动,齿轮轴上的两个主动齿轮随齿轮轴转动,分别用于驱动两块长条形伸缩结构上的两条齿条,主动齿轮转动带动两条齿条朝向中心或背向中心运动,该中心指的是主动齿轮的中心,使得与齿条固定连接的两块圆廓支撑板也能实现相对或者相背运动,当两块圆廓支撑板朝向中心或背向中心运动时即双向伸缩驱动组件实现伸缩运动。
9、优选的,双向伸缩组件的同一伸缩端的两块圆廓支撑板的板体上对应开有矩形限位滑槽;驱动模块包括外转子驱动电机、行星减速器以及两个矩形支撑卡块,行星减速器的太阳轮安装至外转子驱动电机的定子上,主动轮与行星减速器外圈连接,两块矩形支撑卡块分别与外转子驱动电机的定子轴两端固定连接,外转子驱动电机通过矩形支撑卡块分别安装至同一伸缩端的两块圆廓支撑板的矩形限位滑槽内,矩形支撑卡块沿矩形限位滑槽的滑动方向与长条形窗口的长度方向一致,矩形支撑卡块与圆廓支撑板之间设置有沿矩形支撑卡块滑动方向布置的弹簧减震组件。
10、其中,外转子驱动电机的定子轴两端分别与矩形支撑卡块固定连接,弹簧减震组件在矩形支撑卡块沿矩形限位滑槽滑动时起到缓冲作用,外转子驱动电机通过行星减速器减速增扭后驱动其上的主动轮转动,主动轮和履带之间张紧配合的同时还因弹簧减震组件的存在使主动轮和履带弹性连接。弹簧减震组件通过螺母固定定子轴端部的同时还可以减震缓冲冲击载荷,同时解决了变形过程中外周长与履带周长不匹配的问题。
11、优选的,弹簧减震组件包括两个弹簧安装座和两根减震弹簧,其中一个弹簧安装座固定安装至圆廓支撑板的外侧壁上,另一个弹簧安装座固定安装至矩形支撑卡块的外侧壁上,两个弹簧安装座平行相对,两根减震弹簧固定连接至两个弹簧安装座之间。这样设置结构合理,弹簧的伸缩方向与矩形支撑卡块沿矩形限位滑槽的活动方向一致。
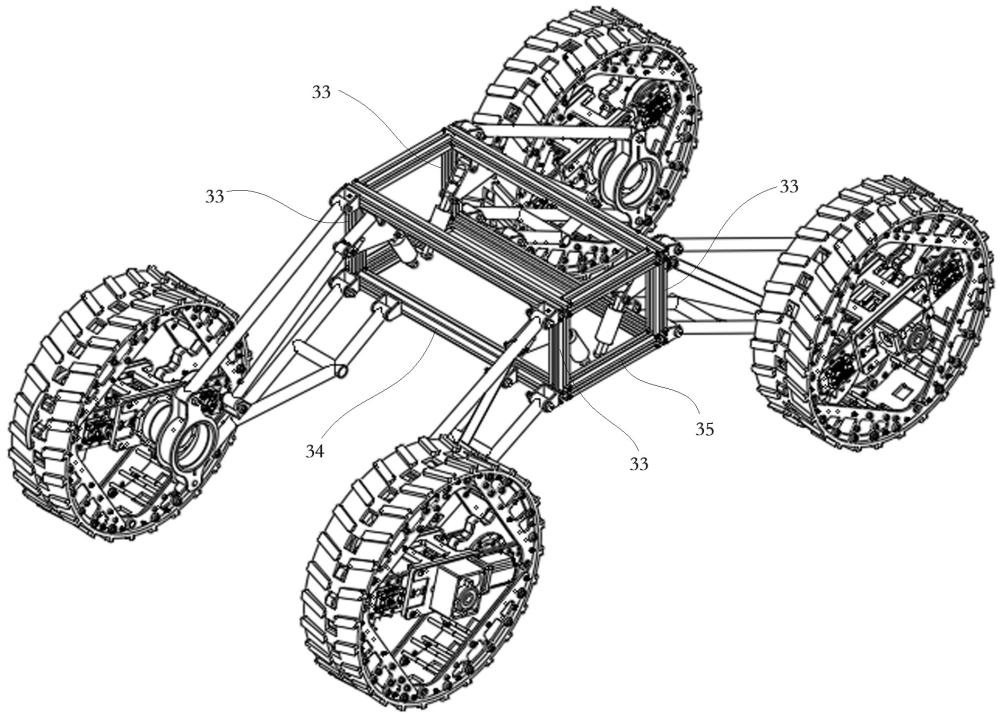
12、本发明还提供了一种可升降轮履足复合主动悬架底盘,包括四个本发明所述的轮履复合变形轮,还包括长方体框架和四套叉臂悬架模块,叉臂悬架模块包括上摆臂、推杆、y形下叉臂、三角形摇臂和主动减震器,轮履复合变形轮内侧的导向侧板上安装有轮边模块,轮边模块的上下延伸有两个位置相对的连接部,四个轮履复合变形轮分别通过四套叉臂悬架模块安装至长方体框架的四根竖向支柱上,其中,上摆臂的一端铰接至竖向支柱的顶部,上摆臂的另一端铰接至轮边模块靠上的连接部;y形下叉臂的单头端铰接至轮边模块靠下的连接部,y形下叉臂的双头端处一端铰接至竖向支柱的底部且另一端铰接至靠近竖向支柱底部的横梁上;三角形摇臂的第一个顶角处与竖向支柱的顶部铰接,三角形摇臂的第二个顶角与推杆的一端铰接,推杆的另一端铰接至y形下叉臂靠近轮边模块的杆体上,三角形摇臂的第三个顶角与主动减震器的一端铰接,主动减震器的另一端铰接至与竖向支柱底部相连的纵梁上。
13、长方体框架和四套叉臂悬架模块连接后,其整体前后对称且左右对称,叉臂悬架模块可以完成避震及转向功能。当轮履复合变形轮上下跳动时,叉臂悬架模块中的上摆臂和下叉臂引导轮运动,使其绕上摆臂与竖向支柱的连接点处的用于铰接的吊耳转动(同时绕下叉臂的双头端连接点处用于铰接的吊耳转动)。此时推杆带动摇臂绕摇臂最高点处的用于铰接的吊耳转动,摇臂压缩或者拉升主动减震器。当需要控制轮抬起或下降时只需要主动减震器拉伸或者缩短就能控制轮上抬或下移。其中,轮边模块包括转向节和轮驱动电机模块,能传递运动和力,定位车轮。在轮履复合变形轮变形为圆形轮时,轮驱动电机为整车的原动机。轮边模块还集成了轮形、转向节、电机等零件,结构类似于赛车轮边系统,不属于创新部分。在履带模式下,轮驱动电机可以调整履带模式的变形轮接地角度以便翻越障碍。必要时,椭圆形的变形轮直立后配合叉臂悬架模块就能像足式行走机器人一样行走越障。
14、具体使用时,本发明所述可升降轮履足复合主动悬架底盘还匹配有控制系统,控制系统能控制轮履复合变形轮上的变形驱动电机以使轮履复合变形轮在圆轮和椭圆轮之间转换。当轮履复合变形轮为圆形轮时,控制系统通过控制轮边模块内的电机进而使轮履复合变形轮转动,外转子驱动电机以及行星减速器不动,履带与主体支撑部之间相对固定,轮履复合变形轮用作常规车轮使用,此时可升降轮履足复合主动悬架底盘为传统小车;当轮履复合变形轮变形为椭圆轮时,控制系统控制轮边模块内的电机仅在改变接近交和离去角时工作,轮履复合变形轮一般情况下不会转动,外转子驱动电机在控制系统的控制下运行,使主动轮带动履带与主体支撑部之间相对转动,轮履复合变形轮用作履带式车轮,使可升降轮履足复合主动悬架底盘成为履带式行走小车,该模式适合在恶劣的环境下行驶,此时的轮边模块的电机可以调整角度,从而改变接近角与离去角。控制系统还能控制叉臂悬架模块的主动减震器进行伸缩,改变车架离地间隙,从而改变通过角。在极端工况下,轮履复合变形轮变形为椭圆形结构时,四条椭圆形的轮履复合变形轮与对应叉臂悬架模块组成四条行走腿,控制系统通过叉臂悬架模块控制行走腿的活动,轮边电机可控制轮的转向,其中差速转向仅在轮式复合主动悬架底盘、履式复合主动悬架底盘时通过控制电机转速差实现转向,使可升降轮履足复合主动悬架底盘成为足式行走系统,足式行走系统具有较好的越障能力以及极高的通过性。底盘的轮模式,车轮由轮边模块的四个轮毂电机驱动,通过控制各轮的转速差来转向。在路况较好的路面上可以以较快的速度行驶并且对履带磨损较小。
15、本发明提供的技术方案与现有技术相比具有如下优点:轮履复合变形轮可变形为圆形轮和椭圆形的履带轮,当变形为椭圆形的履带轮时,其椭圆形结构使变形轮具有更大的接近角,配合主动悬架可以实现轮履足三种模式切换;结合了轮履复合变形轮的主动悬架底盘可用于特种车辆,可以在不同路况切换为轮式底盘、履带式底盘和足式底盘,具有广泛的适应能力,相比于传统的三角轮履复合变形轮底盘,拥有更好的变形轮性能与更简洁的变形轮结构,更好的通过性能,可以实现全地形全天候的工作,大大提升了使用范围,解决了轮式特种车辆通过性较差,履带式特种车辆履带寿命短速度慢的问题。
- 还没有人留言评论。精彩留言会获得点赞!