一种考虑燃料电池动态响应的燃料电池汽车能量管理方法
本发明涉及燃料电池汽车领域,尤其是涉及一种考虑燃料电池动态响应的燃料电池汽车能量管理方法。
背景技术:
1、能量管理策略直接影响氢燃料电池汽车日常运行的经济性和耐久性,好的能量管理策略可以最大限度地发挥燃料电池汽车各项动力源的潜力,因此设计符合车辆实际运行的能量管理策略十分重要,如公开号为cn116001653a的发明提供的一种考虑热安全与耐久性的氢燃料电池汽车能量管理方法。
2、受空气系统影响,燃料电池动态响应慢,当工况快速变化时,燃料电池变载过快容易产生不良影响,因此将燃料电池的动态响应性能考虑进入能量管理策略中十分必要。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,考虑燃料电池的动态响应性能,使能量管理策略更加贴合燃料电池汽车的动态性能,进一步提高经济性和耐久性。
2、本发明的目的可以通过以下技术方案来实现:
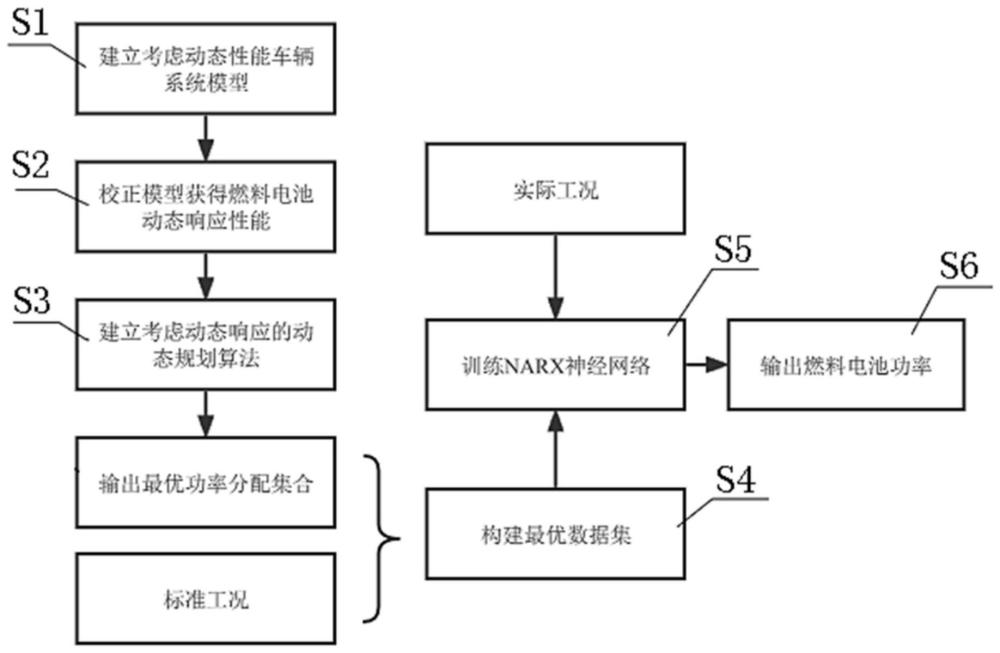
3、一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,包括以下步骤:
4、根据待控制燃料电池汽车结构,建立车辆整车动力系统模型;
5、根据所述车辆整车动力系统模型进行模型参数修正,获取燃料电池加载到额定功率的功率-时间曲线,得到燃料电池在不同功率下对应的最大可变载功率值表;
6、建立考虑动态响应特性的动态规划算法,该动态规划算法建立过程中根据当前时刻的功率值,限制下一时刻的寻优范围为当前功率对应的最大可变载功率值范围内,以最小氢气消耗量为目标,循环计算获取最优的功率输出曲线;
7、选择多个标准工况,依次输入车辆整车动力系统模型中,获得整车需求功率,将该需求功率输入动态规划算法中,获得不同工况下对应的燃料电池和蓄电池最优输出功率,以此构建最优数据集;
8、采用最优数据集对预先构建好的神经网络模型进行训练;
9、以待控制燃料电池汽车的实际工况输入训练好的神经网络模型中,得到燃料电池与蓄电池的功率分配结果,进而控制燃料电池和蓄电池的工作状态。
10、进一步地,所述车辆整车动力系统模型包括燃料电池电堆、蓄电池、dc/dc模型、电机、电机控制器、空压机模型和进气管路模型。
11、进一步地,所述动态规划算法的目标函数的表达式为:
12、
13、
14、式中,j为目标函数值,m为氢气消耗量,n为预测的时域大小,为氢气的摩尔质量,ifc为燃料电池堆电流,n为燃料电池单体个数,f为法拉第常数,eh2为氢气的低热值,η为燃料电池效率,pfc为燃料电池输出功率。
15、进一步地,所述动态规划算法限制的下一时刻寻优范围的表达式为:
16、fmin(pfc(t))≤pfc(t+1)≤fmax(pfc(t))
17、式中,fmin(pfc(t))、fmax(pfc(t))分别为由t时刻燃料电池功率决定的t+1时刻燃料电池的最小功率和最大功率,pfc(t+1)为t+1时刻燃料电池的输出功率。
18、进一步地,所述动态规划算法获取最优的功率输出曲线的过程具体包括:
19、s401:获取需求功率;
20、s402:根据该需求功率,确定对应的最大可变载功率值范围,作为下一时刻的寻优范围;
21、s403:在下一时刻的寻优范围内计算不同功率下燃料电池氢气消耗量;
22、s404:根据状态转移方程获得获得下一时刻功率输出的可行解;
23、s405:判断可行解是否达到最小氢气消耗量的目标,若达到,则构建最优的功率输出曲线,若未达到,则返回步骤s402,进行迭代寻优。
24、进一步地,所述神经网络模型为非线性自回归外生神经网络模型。
25、进一步地,所述非线性自回归外生神经网络模型包括输入层、隐藏层、输出层以及输入输出延时。
26、进一步地,所述非线性自回归外生神经网络模型的隐藏层包括10个神经元,所述输入输出延时为7个时间步长。
27、进一步地,所述非线性自回归外生神经网络模型的输入数据包括速度、需求功率、最大加速度、最小加速度、平均速度。
28、进一步地,通过对燃料电池加载到额定功率的功率-时间曲线求导,得到燃料电池在不同功率下对应的最大可变载功率值表。
29、与现有技术相比,本发明具有以下优点:
30、(1)本发明提出的动态规划算法根据当前时刻的功率值,限制下一时刻的寻优范围为可变载功率范围内,考虑了燃料电池的动态响应能力,使设计出的能量管理策略更加符合燃料电池汽车的实际使用情况,结果更具实用价值。同时通过合理的限制功率寻优范围,在一定程度上提升了燃料电池汽车的经济性和耐久性。
31、(2)本发明利用动态规划的结果训练出的narx神经网络,可以用来解决时间序列问题,即根据过去一段时间系统的状态预测未来系统的状态,为车辆的能量管理策略兼顾了实时性。
技术特征:
1.一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述车辆整车动力系统模型包括燃料电池电堆、蓄电池、dc/dc模型、电机、电机控制器、空压机模型和进气管路模型。
3.根据权利要求1所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述动态规划算法的目标函数的表达式为:
4.根据权利要求3所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述动态规划算法限制的下一时刻寻优范围的表达式为:
5.根据权利要求1所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述动态规划算法获取最优的功率输出曲线的过程具体包括:
6.根据权利要求1所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述神经网络模型为非线性自回归外生神经网络模型。
7.根据权利要求6所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述非线性自回归外生神经网络模型包括输入层、隐藏层、输出层以及输入输出延时。
8.根据权利要求7所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述非线性自回归外生神经网络模型的隐藏层包括10个神经元,所述输入输出延时为7个时间步长。
9.根据权利要求6所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,所述非线性自回归外生神经网络模型的输入数据包括速度、需求功率、最大加速度、最小加速度、平均速度。
10.根据权利要求1所述的一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,其特征在于,通过对燃料电池加载到额定功率的功率-时间曲线求导,得到燃料电池在不同功率下对应的最大可变载功率值表。
技术总结
本发明涉及一种考虑燃料电池动态响应的燃料电池汽车能量管理方法,包括:建立车辆整车动力系统模型,获取燃料电池在不同功率下对应的最大可变载功率值表;建立动态规划算法,建立过程中根据当前时刻的功率值,限制下一时刻的寻优范围为最大可变载功率值范围内;选择多个标准工况,依次输入模型中,获得整车需求功率,并通过动态规划算法获得燃料电池和蓄电池最优输出功率,以此构建最优数据集;采用最优数据集进行神经网络训练;以实际工况输入神经网络中,得到燃料电池与蓄电池的功率分配结果。与现有技术相比,本发明可以更加准确地反映燃料电池的动态响应性能,使能量管理策略更加贴合燃料电池汽车的动态性能,进一步提高经济性和耐久性。
技术研发人员:高源,梁博文,王子恒,王田文,刘浩,章桐
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!