一种匝道中紧急制动运作方法及装置与流程
本发明涉及智能化汽车领域,特别是涉及一种匝道中紧急制动运作方法及装置。
背景技术:
1、随着目前智能化汽车普及程度越来越高,根据sae划分的自动驾驶等级,l2+/l3-级别车辆在市场上越来越常见。其中包含的功能主要有:aeb(紧急制动辅助系统)、acc(自适应巡航系统)、lka(车道保持辅助系统)、ica(智能领航系统)、tlc(触发变道功能)等。众所周知,安全性在辅助驾驶中极为重要,aeb作为紧急时刻自动刹车功能,能够极大降低交通事故率,帮助车辆避免碰撞。因此aeb功能的性能好坏显得尤为重要。由于目前大部分aeb功能基于传感器的量测,计算出自车和前方障碍物的碰撞时间,对比预设的ttc,来判断功能是否触发。所以目前市场上大部分智能汽车的aeb功能仅在自车保持直行或者带非常小的转向的情况下触发,对于弯道中尤其是类似于匝道大弯这种工况下对于障碍物运动趋势的预测、以及碰撞点无法准确的计算,导致功能受限,无法触发其功能。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种匝道中紧急制动运作方法及装置,使其在aeb紧急制动功能已经在智能化汽车中逐渐成为标配功能的情况下,拓展了aeb功能的适用场景,涵盖匝道、大弯道场景,能够准确预测障碍物在匝道中的运动轨迹,充分考虑到自车转向带来的影响,准确计算自车与障碍物的碰撞风险,避免匝道中碰撞事故的发生,提高了车辆行驶的安全性。
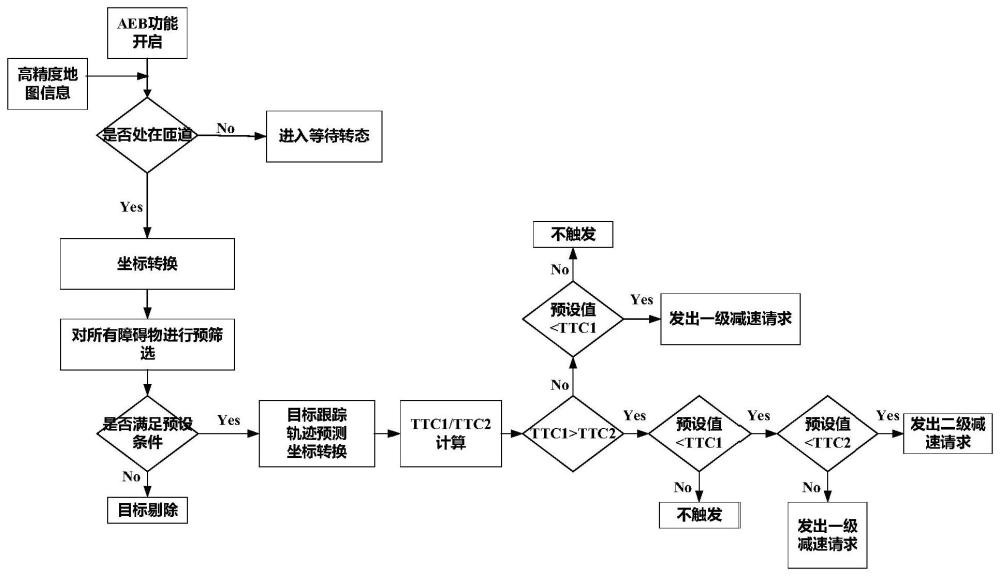
2、本发明提供的一种匝道中紧急制动运作方法,包括如下步骤:自车位置判断:使用高精度地图定位的信息,或者根据摄像头获取的车道线曲率信息,判断目前自车是否处于匝道中,如果是则进入计算与判断步骤,如果否则继续向前行驶;坐标转换:获取来自传感器的障碍物位姿信息以及两侧车道线信息,将感知信息做坐标转换;目标初步筛选:基于规则初步筛选掉部分不可能产生碰撞风险的障碍物;目标车辆轨迹跟踪:采用恒定转弯率及恒定速度模型来拟合持续转弯行驶的目标车辆的运动情况,将传感器获取的目标车辆的原始信号在笛卡尔坐标系下进行预测;碰撞时间计算:采用两级碰撞风险分别计算对应的预测碰撞时间ttci和实时碰撞时间ttc2;制动策略选定:标定自车在各种速度条件下的碰撞时间阈值ittc,根据预测碰撞时间ttc1、实时碰撞时间ttc2和理论上的碰撞时间ittc之间的大小关系,设定车辆的碰撞风险等级,并制定对应的制动策略。
3、在上述技术方案中,所述坐标转换步骤的具体过程如下:建立坐标系:取车道中心线为参考线,使用参考线的切线向量以及法线向量建立frenet坐标系;障碍物投影距离参数:将自车坐标点投影到frenet坐标系下的点设为原点,将障碍物的横纵向距离(x,y)投影到该参考线上,转换得出(s,d),其中,s——参考线方向上障碍物距离本车的距离,d——障碍物在垂直于参考线方向上的距离;本车道上的自车位置:基于摄像头信息获取自车在本车道的位置,即自车中心分别到左、右侧车道线的距离。
4、在上述技术方案中,所述坐标转换步骤中,还包括障碍物投影运动参数子步骤,其具体过程为:将障碍物坐标点投影到frenet坐标系下的点设为原点,将障碍物的横纵向速度和加速度分别投影到车道中心线上,转换得到车道中心线方向上障碍物的横纵向速度和加速度。
5、在上述技术方案中,所述目标初步筛选步骤的具体过程如下:纵向方向障碍物筛选:筛除纵向距离s超过纵向距离阈值、纵向速度s’超过纵向速度阈值的障碍物;横向方向障碍物筛选:筛除横向距离d与自车到车道中心线横向距离差的绝对值超过横向距离差值阈值、横向速度超过横向速度阈值的障碍物;距离参数相关障碍物筛选:基于坐标转换步骤中获取的障碍物感知数据,对纵向距离s进行从小到大排序,获取距离前三的障碍物信息,其他障碍物筛选掉;障碍物类型筛选:基于坐标转换步骤中获取的障碍物分类信息,筛除掉行人、两轮车、三轮车这些障碍物。
6、在上述技术方案中,所述目标车辆轨迹跟踪步骤的具体过程如下:恒定转弯率及恒定速度模型:恒定转弯率和恒定速度模型状态方程如下:vk+1=vk,θk+1=θk+w*dt,
7、其中:x——纵向距离,y——横向距离,v——车速,ψ——偏航角,w——偏航角速度;目标车辆运动信息预测:使用卡尔曼滤波对障碍物的运动信息进行预测,得出经过运动学模型预测过后的目标车辆运动信息,包含横纵向距离、横纵向速度、加速度。
8、在上述技术方案中,所述目标车辆轨迹跟踪步骤中,所述目标车辆运动信息预测子步骤还包括如下过程:将目标车辆运动信息值转换到frenet坐标系下的目标车辆运动信息物理值,即具体过程如下:将目标车辆坐标点投影到frenet坐标系下的点设为原点,将目标车辆的横纵向距离投影到车道中心线上,转换得到车道中心线方向上目标车辆距离本车的距离以及目标车辆在垂直于车道中心线方向上的距离;将目标车辆坐标点投影到frenet坐标系下的点设为原点,将目标车辆的横纵向速度和加速度分别投影到车道中心线上,转换得到车道中心线方向上目标车辆的横纵向速度和加速度。
9、在上述技术方案中,所述碰撞时间计算步骤采用两级碰撞风险来计算,其具体过程如下:目标车辆delt_t时间前后的纵向距离差值:按照自车当前方向盘转角,计算一定时间delt_t后自车所处在的位置(x1,y1),换算到frenet坐标系下的位置(x1’,y1’),同时目标车辆也在转弯,基于目标车辆轨迹跟踪步骤中对目标车辆的轨迹预测,计算出delt_t时间后目标车辆所处的新位置,计算在frenet坐标系下目标车辆delt_t时间后的纵向距离dis_1;当前时刻目标车辆到自车的纵向距离:计算当前时刻目标车辆到自车的纵向距离dis_2的具体过程如下:使用如下公式计算预测碰撞时间ttci和实时碰撞时间ttc2:其中,arel——当前时刻纵向相对加速度,vrel——当前时刻纵向相对速度,dis_1——目标车辆在delt_t时间后的纵向距离,dis_2——当前时刻目标车辆到自车的纵向距离。
10、在上述技术方案中,所述制动策略选定步骤的具体过程如下:预设碰撞时间阈值ittc:根据实际车辆制动表现、以及预留的安全刹停距离,标定自车在各种速度条件下的碰撞时间阈值ittc;根据路况选择制动方案:当ttc1>ttc2,则预测未来一定时间内有碰撞风险,此时若ttc1>ittc>ttc2时,系统状态由“等待”跳转至“一级碰撞风险”,发出一级制动请求,减速度大小为m1,直至自车计算出与前面目标车辆无碰撞风险,则取消减速度或驾驶员介入踩刹车,系统跳转至“等待”;若ittc<ttc2时,即系统判断现在已经处于非常紧急的时刻,系统状态由“一级碰撞风险”跳转至“二级碰撞风险”,发出二级制动请求,减速度大小为m2,即全力制动;当ttc1<tt2时,则说明在未来一段时间内碰撞风险较低,若ittc>ttc1时,系统不发出减速请求,停留在“等待”状态;若ittc小于ttc1时,系统状态由“等待”跳转至“一级碰撞风险”,发出一级制动请求,减速度大小为m1,直至自车计算出与前面目标车辆无碰撞风险,则取消减速度或驾驶员介入踩刹车,系统跳转至“等待”。
11、在上述技术方案中,所述制动策略选定步骤中,根据路况选择制动方案子步骤还包括“延时状态”即“二级碰撞风险”退出必须满足的条件,其具体过程如下:在“二级碰撞风险”跳转至“等待”状态时,需满足延时t,即当车辆全力制动后,自车与前面目标车辆已无风险,此时系统状态由“二级碰撞风险”跳转至“延时t”状态,系统继续请求减速度大小m2,延时达到时间t后,由“延时t”跳转至“等待”,此轮aeb紧急制动完成。
12、本发明还提供了一种匝道中紧急制动运作装置,具有计算机程序,该计算机程序能够执行匝道中紧急制动运作方法。
13、本发明匝道中紧急制动运作方法及装置,具有以下有益效果:
14、本发明突出使用在匝道场景中,在紧急情况下避免与前方目标车辆发生碰撞,降低了事故发生几率,提高了车辆行驶的安全性。并且基于高精度地图信息以及传感器探测的信息,筛选出aeb触发的候选目标,准确预测障碍物移动的轨迹以及可能的碰撞时间,引入新型ttc计算方法,采取分级制动策略,确保该功能更加智能化和精确化。
- 还没有人留言评论。精彩留言会获得点赞!