定速巡航控制方法、装置、设备及存储介质与流程
本发明涉及车辆,尤其涉及一种定速巡航控制方法、装置、设备及存储介质。
背景技术:
1、随着汽车进入普通家庭,车辆开始应对的工况数量开始巨量增加。车辆适应时代下的驾驶需求,基于各类车身传感器、车身执行器和车身控制器,做出了各类驾驶辅助功能。其中在行车道路上对于自动驾驶巡航运用,使得汽车的驾驶体验智能化、便利化。乘用车的普及,以及公共道路的拓展,车辆行驶工况所遇到道路场景也开始逐渐复杂化,多层的高架路、长隧道、涵洞等等。如何使得控车更加线性,更贴近人的操作,保证在定速巡航过程中对加速度做精细控制是目前亟待解决的问题。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种定速巡航控制方法、装置、设备及存储介质,旨在解决现有技术定速巡航过程中,如何对加速度进行准确控制,使得控车更加线性的技术问题。
2、为实现上述目的,本发明提供了一种定速巡航控制方法,所述方法包括以下步骤:
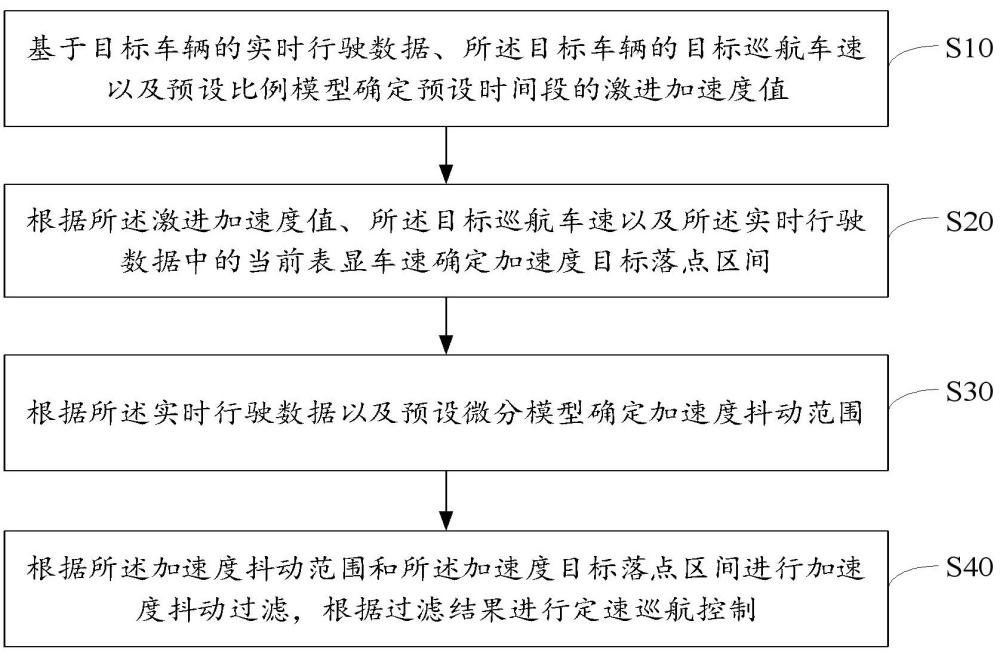
3、基于目标车辆的实时行驶数据、所述目标车辆的目标巡航车速以及预设比例模型确定预设时间段的激进加速度值;
4、根据所述激进加速度值、所述目标巡航车速以及所述实时行驶数据中的当前表显车速确定加速度目标落点区间;
5、根据所述实时行驶数据以及预设微分模型确定加速度抖动范围;
6、根据所述加速度抖动范围和所述加速度目标落点区间进行加速度抖动过滤,根据过滤结果进行定速巡航控制。
7、可选地,所述基于目标车辆的实时行驶数据、所述目标车辆的目标巡航车速以及预设比例模型确定预设时间段的激进加速度值,包括:
8、基于目标车辆的实时行驶数据和所述目标车辆的目标巡航车速进行速度差值计算,确定速度动态差;
9、根据所述速度动态差和预设单位时间确定所述目标车辆的比例控制时间定量;
10、根据所述实时行驶数据、所述目标巡航车速、所述比例控制时间定量以及预设比例模型确定预设时间段的激进加速度值。
11、可选地,所述根据所述速度动态差和预设单位时间确定所述目标车辆的比例控制时间定量,包括:
12、根据所述速度动态差进行状态分类,确定减速状态动态差和加速状态动态差;
13、根据所述减速状态动态差和预设单位时间进行差值计算,确定减速时间定量;
14、根据所述加速状态动态差和预设单位时间进行差值计算,确定加速时间定量;
15、根据所述减速时间定量和加速时间定量确定比例控制时间定量。
16、可选地,所述根据所述实时行驶数据、所述目标巡航车速、所述比例控制时间定量以及预设比例模型确定预设时间段的激进加速度值,包括:
17、将所述实时行驶数据中的当前表显车速和所述目标巡航车速进行比较;
18、在所述目标巡航车速不小于所述当前表显车速时,根据预设比例模型中的第一比例模型、所述比例控制时间定量中的加速时间定量、所述目标巡航车速以及所述当前表显车速进行计算,确定预设时间段的激进加速度值;
19、在所述目标巡航车速小于所述当前表显车速时,根据预设比例模型中的第二比例模型、所述比例控制时间定量中的减速时间定量、所述目标巡航车速以及所述当前表显车速进行计算,确定预设时间段的激进加速度值。
20、可选地,所述根据所述激进加速度值、所述目标巡航车速以及所述实时行驶数据中的当前表显车速确定加速度目标落点区间,包括:
21、根据所述激进加速度值和预设加速度范围确定加速度输出区间;
22、根据所述目标巡航车速以及所述实时行驶数据中的当前表显车速确定目标加速度边界;
23、根据所述目标加速度边界和所述加速度输出区间确定加速度初始落点区间;
24、对所述加速度初始落点区间进行区间扩展,确定加速度目标落点区间。
25、可选地,所述根据所述实时行驶数据以及预设微分模型确定加速度抖动范围,包括:
26、根据所述实时行驶数据确定纵向加速度;
27、根据所述纵向加速度、所述激进加速度值、预设瞬时加速度计算范围、上限比例控制时间系数以及预设微分模型进行上限计算,确定加速度抖动上限;
28、根据所述纵向加速度、所述激进加速度值、预设瞬时加速度计算范围、下限比例控制时间系数以及预设微分模型进行上限计算,确定加速度抖动下限;
29、根据所述加速度抖动上限和所述加速度抖动下限确定加速度抖动范围。
30、可选地,所述根据所述加速度抖动范围和所述加速度目标落点区间进行加速度抖动过滤,根据过滤结果进行定速巡航控制,包括:
31、根据所述实时行驶数据进行加速度差值计算,确定瞬时加速度差值;
32、根据所述瞬时加速度差值和所述加速度抖动范围进行比较;
33、根据比较结果和所述加速度目标落点区间确定目标输出加速度;
34、根据所述目标输出加速度进行定速巡航控制。
35、此外,为实现上述目的,本发明还提出一种定速巡航控制装置,所述定速巡航控制装置包括:
36、处理模块,用于基于目标车辆的实时行驶数据、所述目标车辆的目标巡航车速以及预设比例模型确定预设时间段的激进加速度值;
37、所述处理模块,还用于根据所述激进加速度值、所述目标巡航车速以及所述实时行驶数据中的当前表显车速确定加速度目标落点区间;
38、所述处理模块,还用于根据所述实时行驶数据以及预设微分模型确定加速度抖动范围;
39、控制模块,用于根据所述加速度抖动范围和所述加速度目标落点区间进行加速度抖动过滤,根据过滤结果进行定速巡航控制。
40、此外,为实现上述目的,本发明还提出一种定速巡航控制设备,所述定速巡航控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的定速巡航控制程序,所述定速巡航控制程序配置为实现如上文所述的定速巡航控制方法的步骤。
41、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有定速巡航控制程序,所述定速巡航控制程序被处理器执行时实现如上文所述的定速巡航控制方法的步骤。
42、本发明通过基于目标车辆的实时行驶数据、所述目标车辆的目标巡航车速以及预设比例模型确定预设时间段的激进加速度值;根据所述激进加速度值、所述目标巡航车速以及所述实时行驶数据中的当前表显车速确定加速度目标落点区间;根据所述实时行驶数据以及预设微分模型确定加速度抖动范围;根据所述加速度抖动范围和所述加速度目标落点区间进行加速度抖动过滤,根据过滤结果进行定速巡航控制。通过上述方式,基于目标车辆的实时行驶数据、目标巡航车速以及预设比例模型确定预设时间段的激进加速度值,并进一步确定加速度目标落点区间,利用实时行驶数据以及预设微分模型确定加速度抖动范围,根据加速度抖动范围和加速度落点区间进行加速度抖动过滤,实现了在定速巡航过程中对纵向的线控加速度的精细控制,减少了车辆抖动,同时进一步保证了行车安全性,提升了用户驾驶体验感。
- 还没有人留言评论。精彩留言会获得点赞!