一种轮履协同驱动控制方法及系统
本发明涉及轮履协同驱动车辆领域,尤其涉及一种轮履协同驱动控制方法及系统。
背景技术:
1、轮履协同驱动可以提高车辆在滩涂和软基路面的通过能力,切换成车轮驱动模式后又可以保证车辆在良好路面的行驶性能。通过滩涂和软基路面时,车辆的阻力随机变化,轮胎和履带的速度、动力和驱动方式不同。因此,轮履驱动模式适时切换、轮履速度协同控制和动力协调分配对提升车辆在滩涂和软基路面的动力性及通过性至关重要。
2、然而,现有轮履协同驱动控制的研究中,均依靠驾驶员经验去手动操作履带的升降,对于履带升降时机及驱动模式切换时机的判断均难以达到较好水平,难以使履带发挥出较优的作用。并且,现有轮履协同驱动控制多以轮履速度协同为控制目标,仅考虑车轮与履带的轮速差去调节轮履转速,难以提高车辆在滩涂和软基路面行驶的动力性及通过性。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。
2、因此,本发明提供了一种轮履协同驱动控制方法及系统解决目前履带升降及驱动模式切换时机的判断均难以达到较准确的水平,履带功能发挥受限;且轮履协同驱动控制难以提高车辆在滩涂和软基路面行驶的动力性及通过性的问题。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明提供了一种轮履协同驱动控制方法,包括:
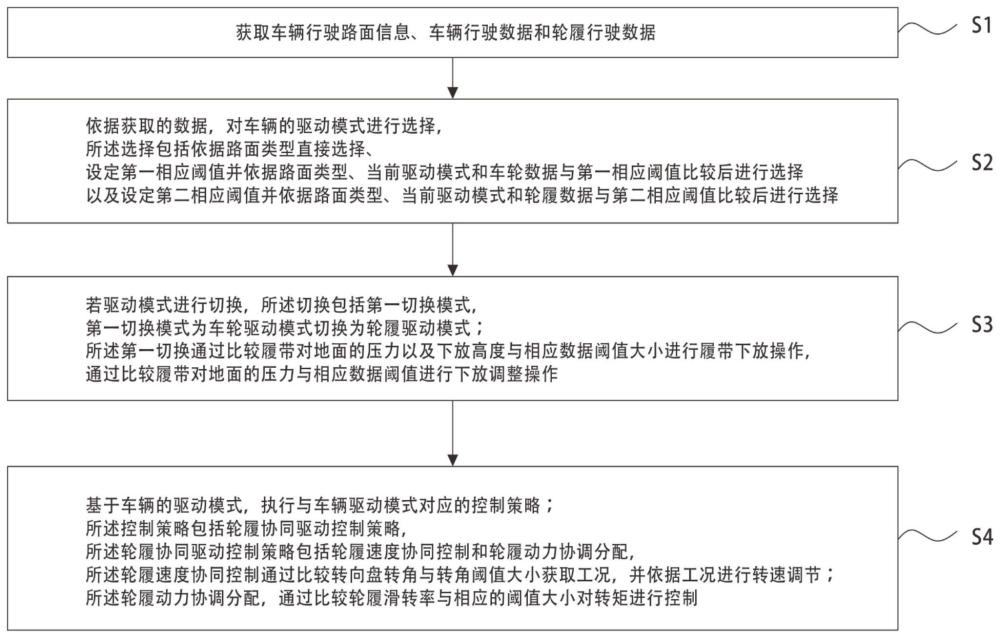
5、获取车辆行驶路面信息、车辆行驶数据和轮履行驶数据;
6、依据获取的数据,对车辆的驱动模式进行选择,所述选择包括依据路面类型直接选择、设定第一相应阈值并依据路面类型、当前驱动模式和车轮数据与第一相应阈值比较后进行选择以及设定第二相应阈值并依据路面类型、当前驱动模式和轮履数据与第二相应阈值比较后进行选择;
7、若驱动模式进行切换,所述切换包括第一切换模式,第一切换模式为车轮驱动模式切换为轮履驱动模式;所述第一切换通过比较履带对地面的压力以及下放高度与相应数据阈值大小进行履带下放操作,通过比较履带对地面的压力与相应数据阈值进行下放调整操作;
8、基于车辆的驱动模式,执行与车辆驱动模式对应的控制策略;所述控制策略包括轮履协同驱动控制策略,所述轮履协同驱动控制策略包括轮履速度协同控制和轮履动力协调分配,所述轮履速度协同控制通过比较转向盘转角与转角阈值大小获取工况,并依据工况进行转速调节;所述轮履动力协调分配,通过比较轮履滑转率与相应的阈值大小对转矩进行控制。
9、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:依据获取的数据,对车辆的驱动模式进行选择,包括,
10、所述路面类型包括,沥青路面、水泥混凝土路面以及非沥青非水泥混凝土路面;
11、依据路面类型直接选择,具体包括,
12、若车辆的当前行驶路面类型为沥青路面或水泥混凝土路面,则选择车轮驱动模式;
13、设定第一相应阈值并依据路面类型、当前驱动模式和车轮数据与第一相应阈值比较后进行选择,具体包括,
14、第一相应阈值包括第一滑转率上限值和第一车轮沉陷深度上限值;
15、若车辆的当前行驶路面类型为非沥青非水泥混凝土路面,且当前驱动模式为车轮驱动模式,并且同时满足车轮滑转率低于第一滑转率上限值、车轮沉陷深度低于第一车轮沉陷深度上限值,则选择驱动模式为车轮驱动模式;
16、设定第二相应阈值并依据路面类型、当前驱动模式和轮履数据与第二相应阈值比较后进行选择,具体包括,
17、第二相应阈值包括第二滑转率上限值和第二车轮沉陷深度上限值以及履带沉陷深度上限值;
18、若车辆的当前行驶路面类型为非沥青非水泥混凝土路面,且当前驱动模式为轮履驱动模式,并且同时满足车轮滑转率低于第二滑转率上限值、车轮沉陷深度低于第二车轮沉陷深度上限值以及履带沉陷深度上限值,则选择驱动模式为车轮驱动模式;
19、依据获取的数据,对车辆的驱动模式进行选择,还包括,
20、若均不符合三种选择情况,则选择驱动模式为轮履驱动模式。
21、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:所述第一切换通过比较履带对地面的压力以及下放高度与相应数据阈值大小进行履带下放操作,包括,
22、判断车速是否为0,若车速不为0则将车辆减速至车速为0;
23、将履带下放,下放过程中,当车辆同时满足履带对地面的压力值大于履带对地面的压力的下限值、履带下降高度大于履带下降高度的下限值时,停止履带下放操作。
24、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:通过比较履带对地面的压力与相应数据阈值进行下放调整操作,包括,
25、所述下放调整操作为当车辆处于所述轮履驱动模式时,根据履带对地面的压力实时调整履带下降高度,具体包括,
26、当履带对地面的压力小于履带对地面的压力下限值时,将履带缓慢下放,下放过程中,当履带对地面的压力大于履带对地面的压力下限值时,停止履带下放操作;
27、当履带对地面的压力大于所述履带对地面的压力上限值时,将履带缓慢提升,提升过程中,当履带对地面的压力小于所述履带对地面的压力上限值时,停止履带提升操作。
28、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:所述切换还包括第二切换模式,所述第二切换模式为轮履驱动模式切换为车轮驱动模式,通过执行履带提升操作实现所述第二切换模式。
29、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:所述轮履速度协同控制通过比较转向盘转角与转角阈值大小获取工况,并依据工况进行转速调节,包括,
30、若转向盘转角小于转角下限值,则车辆处于直行工况;
31、当车辆处于直行工况,计算轮履转速差,并将轮履转速差与转速差阈值比较;
32、若轮履转速差小于转速差阈值,则不对车辆进行轮履速度协同控制;
33、若轮履转速差大于转速差阈值,则调节履带的转速,直至轮履转速差小于转速差阈值时停止调节履带转速;
34、若转向盘转角位于转角下限值和转角上限值之间,则车辆处于小转向工况;
35、当车辆处于小转向工况,根据车辆的车速和转向盘转角,整车控制器采用阿克曼转向模型实时计算出两侧履带的目标转速,实现左右履带主动差速,然后根据左右履带的转速和转向盘转角计算车轮的转速;
36、若转向盘转角大于转角上限值,则车辆处于大转向工况。
37、若车辆处于大转向工况,则模式切换机构执行履带提升操作,将轮履驱动模式切换为车轮驱动模式后,再实施转向,待转向完成后,模式切换机构再执行履带下放操作,将车轮驱动模式切换为轮履驱动模式。
38、作为本发明所述的轮履协同驱动控制方法的一种优选方案,其中:所述轮履动力协调分配,通过比较轮履滑转率与相应的阈值大小对转矩进行控制,包括,
39、根据车辆当前的需求转矩,得出第一驱动机构的预分配输出转矩,第二驱动机构的预分配输出转矩等于车辆当前的需求转矩减第一驱动机构的预分配输出转矩;
40、若车轮滑转率大于第二滑转率,通过pid控制器对车轮进行滑转率控制,进而降低第一驱动机构的预分配输出转矩,获取第一驱动机构的实际输出转矩;若车轮滑转率小于第二滑转率,则第一驱动机构的实际输出转矩等于第一驱动机构的预分配输出转矩;
41、若履带打滑率大于第二滑转率,通过pid控制器对履带进行打滑率控制,进而降低车辆当前的需求转矩,获取车辆当前的实际需求转矩,第二驱动机构的实际输出转矩等于车辆当前的实际需求转矩减第一驱动机构的实际输出转矩;若履带打滑率小于第二滑转率,则第二驱动机构的实际输出转矩等于第二驱动机构的预分配输出转矩。
42、第二方面,本发明提供了一种轮履协同驱动控制装置,包括,
43、获取模块,用于获取车辆行驶路面信息、车辆行驶数据和轮履行驶数据;
44、模式选择模块,用于依据获取的数据,对车辆的驱动模式进行选择,所述选择包括依据路面类型直接选择、设定第一相应阈值并依据路面类型、当前驱动模式和车轮数据与第一相应阈值比较后进行选择以及设定第二相应阈值并依据路面类型、当前驱动模式和轮履数据与第二相应阈值比较后进行选择;
45、切换模块,用于驱动模式进行切换,所述切换包括第一切换模式,第一切换模式为车轮驱动模式切换为轮履驱动模式;所述第一切换通过比较履带对地面的压力以及下放高度与相应数据阈值大小进行履带下放操作,通过比较履带对地面的压力与相应数据阈值进行下放调整操作;
46、控制调整模块,用于基于车辆的驱动模式,执行与车辆驱动模式对应的控制策略;所述控制策略包括轮履协同驱动控制策略,所述轮履协同驱动控制策略包括轮履速度协同控制和轮履动力协调分配,所述轮履速度协同控制通过比较转向盘转角与转角阈值大小获取工况,并依据工况进行转速调节;所述轮履动力协调分配,通过比较轮履滑转率与相应的阈值大小对转矩进行控制。
47、第三方面,本发明提供了一种计算设备,包括:
48、存储器和处理器;
49、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现所述轮履协同驱动控制方法的步骤。
50、第四方面,本发明提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述轮履协同驱动控制方法的步骤。
51、与现有技术相比,本发明的有益效果:本发明通过设定相应的选择模式并依据实际运行数据设定相应的切换规则和控制策略,充分考虑到各运行场景的特殊性,能够智能判断履带升降时机,智能控制履带下降高度,智能切换轮履驱动模式,同时保证轮履速度协同和动力协调分配,提高轮履协同驱动车辆在滩涂和软基路面的动力性及通过性。
- 还没有人留言评论。精彩留言会获得点赞!