车辆及其控制方法、装置和存储介质与流程
本发明涉及车辆,尤其涉及一种车辆的控制方法、一种车辆的控制装置、一种计算机可读存储介质和一种车辆。
背景技术:
1、随着汽车智能底盘技术的不断推动与发展,底盘域控技术得到了全面且快速的发展。然而,伴随着我国道路条件的提升,车辆的时速也得到了提升,车辆在高速行驶或复杂路况下,汽车横摆稳定性仍面临着多方面的挑战。随着车速的提升影响车辆横摆稳定性的因素就会增多,过大的方向盘输入就可能导致车辆失控、侧滑甚至碰撞。
2、相关技术中,采用主动避障的汽车转向系统与制动控制系统的协同控制系统,来计算车辆行驶的安全距离,提高车辆的安全性。但是,这种方法存在响应速度慢、误差大的问题。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种车辆的控制方法,利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
2、本发明的第二个目的在于提出一种车辆的控制装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种车辆。
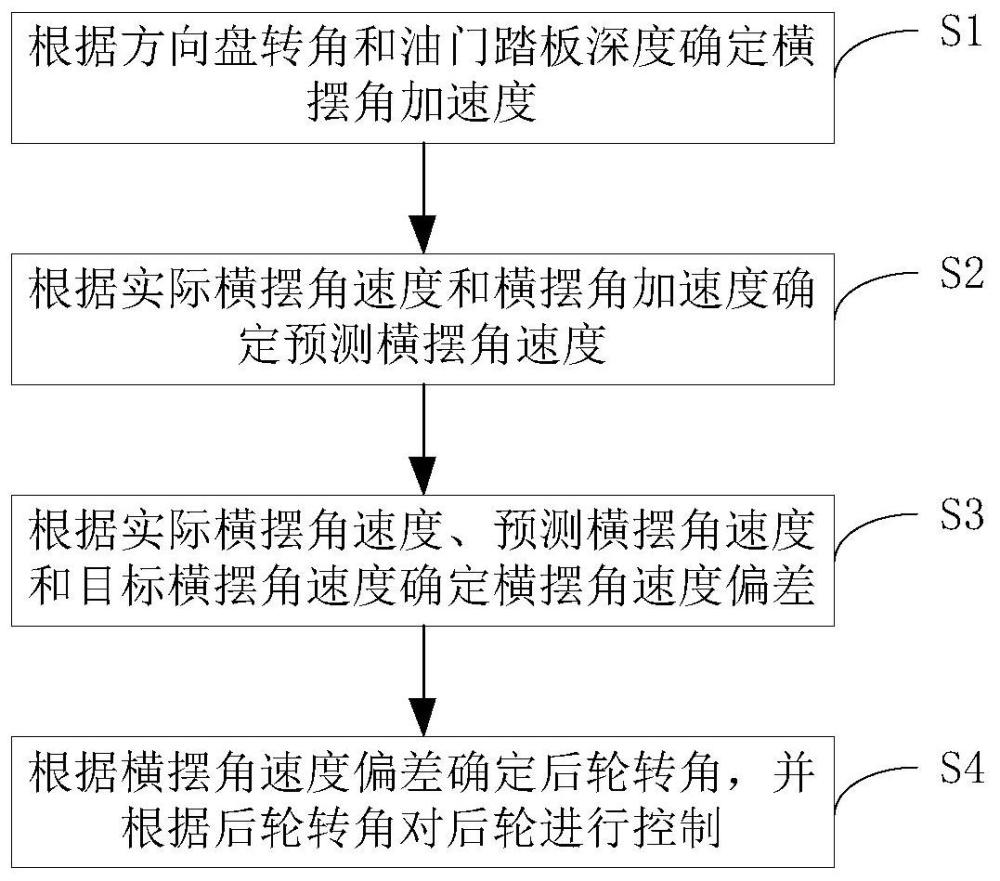
5、为达到上述目的,本发明第一方面实施例提出了一种车辆的控制方法,所述方法包括:根据方向盘转角和油门踏板深度确定橫摆角加速度;根据实际橫摆角速度和所述橫摆角加速度确定预测橫摆角速度;根据所述实际橫摆角速度、所述预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差;根据所述横摆角速度偏差确定后轮转角,并根据所述后轮转角对后轮进行控制。
6、根据本发明实施例的车辆的控制方法,首先根据方向盘转角和油门踏板深度确定橫摆角加速度,然后根据实际橫摆角速度和橫摆角加速度确定预测橫摆角速度,再根据实际橫摆角速度、预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差;最后根据横摆角速度偏差确定后轮转角,并根据后轮转角对后轮进行控制。由此,该方法利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
7、另外,根据本发明上述实施例的车辆的控制方法,还可以具有如下的附加技术特征:
8、根据本发明的一个实施例,根据所述实际橫摆角速度、所述预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差,包括:根据所述目标橫摆角速度与所述预测横摆角速度之差确定前馈角速度偏差;根据所述目标橫摆角速度与所述实际橫摆角速度之差确定反馈角速度偏差;根据所述前馈角速度偏差与所述反馈角速度偏差之和确定所述横摆角速度偏差。
9、根据本发明的一个实施例,根据实际橫摆角速度和所述橫摆角加速度确定预测橫摆角速度,包括:获取预测周期内每个时刻的橫摆角加速度;将所述预测周期内的平均橫摆角加速度作为所述橫摆角加速度;根据所述实际橫摆角速度、所述橫摆角加速度和所述预测周期确定所述预测橫摆角速度。
10、根据本发明的一个实施例,通过下述公式确定所述预测橫摆角速度:
11、ωpre=ωcurrent+α×t
12、其中,ωpre表示所述预测橫摆角速度,ωcurrent表示所述实际橫摆角速度,α表示所述橫摆角加速度,t表示所述预测周期。
13、根据本发明的一个实施例,根据方向盘转角和油门踏板深度确定橫摆角加速度,包括:根据所述方向盘转角和所述油门踏板深度基于轮胎模型获得所述车辆每个车轮的纵向力和侧向力;根据所有车轮的纵向力和侧向力以及车辆基本参数确定所述橫摆角加速度。
14、根据本发明的一个实施例,上述的车辆的控制方法,还包括:在所述橫摆角速度偏差大于预设偏差阈值的情况下,根据所述方向盘转角和车速确定目标车轮;根据所述橫摆角速度偏差确定制动力矩,并根据所述制动力矩对所述目标车轮进行制动控制。
15、根据本发明的一个实施例,根据所述后轮转角对后轮进行控制,包括:在所述车辆的车速处于第一预设车速区间的情况下,控制所述后轮与前轮反向转动;在所述车辆的车速处于第二预设车速区间的情况下,控制所述后轮与前轮同相转动;其中,所述第一预设车速区间的上限值小于所述第二预设车速区间的下限值。
16、为达到上述目的,本发明第二方面实施例提出了一种车辆的控制装置,包括:第一确定模块,用于根据方向盘转角和油门踏板深度确定橫摆角加速度;第二确定模块,用于根据实际橫摆角速度和所述橫摆角加速度确定预测橫摆角速度;第三确定模块,用于根据所述实际橫摆角速度、所述预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差;控制模块,用于根据所述横摆角速度偏差确定后轮转角,并根据所述后轮转角对后轮进行控制。
17、根据本发明实施例的车辆的控制装置,第一确定模块根据方向盘转角和油门踏板深度确定橫摆角加速度,第二确定模块根据实际橫摆角速度和橫摆角加速度确定预测橫摆角速度,第三确定模块根据实际橫摆角速度、预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差,控制模块根据横摆角速度偏差确定后轮转角,并根据后轮转角对后轮进行控制。由此,该装置利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
18、为达到上述目的,本发明第三方面实施例提出了一种计算机可读存储介质,其上存储有车辆的控制程序,该车辆的控制程序被处理器执行时实现上述的车辆的控制方法。
19、根据本发明实施例的计算机可读存储介质,通过上述的车辆的控制方法,利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
20、为达到上述目的,本发明第四方面实施例提出了一种车辆,包括存储器、处理器及存储在存储器上并可在处理器上运行的车辆的控制程序,所述处理器执行所述车辆的控制程序时,实现上述的车辆的控制方法。
21、根据本发明实施例的车辆,通过上述的车辆的控制方法,利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
22、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种车辆的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的控制方法,其特征在于,根据所述实际橫摆角速度、所述预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差,包括:
3.根据权利要求1所述的控制方法,其特征在于,根据实际橫摆角速度和所述橫摆角加速度确定预测橫摆角速度,包括:
4.根据权利要求3所述的控制方法,其特征在于,通过下述公式确定所述预测橫摆角速度:
5.根据权利要求1所述的控制方法,其特征在于,根据方向盘转角和油门踏板深度确定橫摆角加速度,包括:
6.根据权利要求1-5中任一项所述的控制方法,其特征在于,还包括:
7.根据权利要求1-5中任一项所述的控制方法,其特征在于,根据所述后轮转角对后轮进行控制,包括:
8.一种车辆的控制装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其上存储有车辆的控制程序,该车辆的控制程序被处理器执行时实现根据权利要求1-7中任一项所述的车辆的控制方法。
10.一种车辆,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的车辆的控制程序,所述处理器执行所述车辆的控制程序时,实现根据权利要求1-7中任一项所述的车辆的控制方法。
技术总结
本发明公开了一种车辆及其控制方法、装置和存储介质,所述方法包括:根据方向盘转角和油门踏板深度确定橫摆角加速度;根据实际橫摆角速度和橫摆角加速度确定预测橫摆角速度;根据实际橫摆角速度、预测橫摆角速度和目标橫摆角速度确定横摆角速度偏差;根据横摆角速度偏差确定后轮转角,并根据后轮转角对后轮进行控制。本发明的方法,利用前馈控制与反馈控制相互结合的方式确定横摆角速度偏差以对后轮进行控制,能够有效地提高底盘域控制系统在控制过程中的响应速度,并能够减小误差,增加鲁棒性,提升车辆的横摆稳定性。
技术研发人员:冯浩轩,张甲乐,葛强
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!