自动泊车方法及装置与流程
本发明涉及自动泊车,尤其涉及自动泊车方法及装置。
背景技术:
1、目前,自动泊车只能在停车场内或者没有闸机的停车场完成,对于有闸机的停车场,车辆经过闸机时会冲撞闸机或把闸机识别为障碍物而停车,导致车辆受损或自动泊车失败,自动泊车的使用场景受限。因此,为了扩大自动泊车的使用场景,需考虑如何实现车辆自动过停车场闸机的问题。
技术实现思路
1、本发明通过提供自动泊车方法及装置,解决了如何实现车辆自动过停车场闸机的技术问题。
2、一方面,本发明提供如下技术方案:
3、一种自动泊车方法,包括:
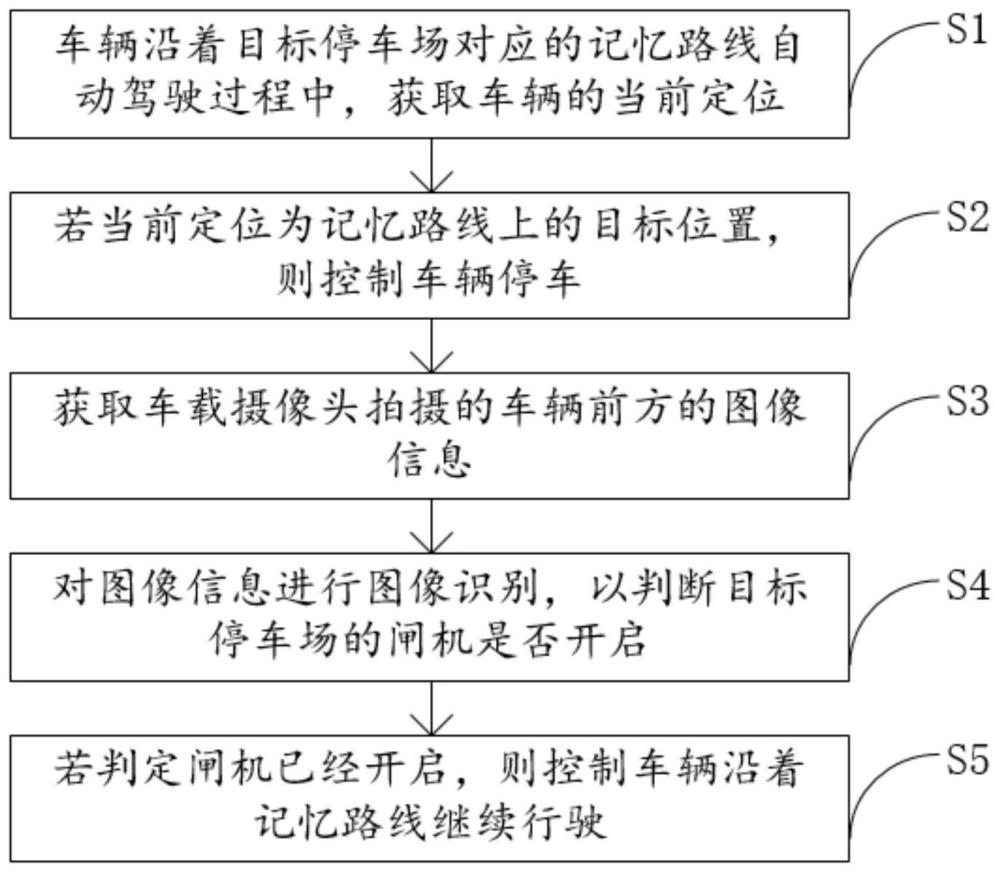
4、车辆沿着目标停车场对应的记忆路线自动驾驶过程中,获取所述车辆的当前定位;
5、若所述当前定位为所述记忆路线上的目标位置,则控制所述车辆停车;
6、获取车载摄像头拍摄的所述车辆前方的图像信息;
7、对所述图像信息进行图像识别,以判断所述目标停车场的闸机是否开启;
8、若判定所述闸机已经开启,则控制所述车辆沿着所述记忆路线继续行驶。
9、可选的,所述记忆路线为泊入路线或泊出路线。
10、可选的,所述记忆路线为泊出路线;
11、所述若所述当前定位为所述记忆路线上的目标位置,则控制所述车辆停车之后、所述获取车载摄像头拍摄的所述车辆前方的图像信息之前,还包括:
12、获取所述目标停车场的缴费二维码和所述车辆的车牌号;
13、扫描所述缴费二维码并结合所述车牌号获取所述车牌号对应的缴费信息;
14、在后台基于所述缴费信息完成缴费后,执行所述获取车载摄像头拍摄的所述车辆前方的图像信息的步骤。
15、可选的,所述对所述图像信息进行图像识别,以判断所述目标停车场的闸机是否开启,包括:
16、识别所述图像信息中的闸机图像特征;
17、若所述闸机图像特征与预设图像特征一致,则获取所述闸机图像特征与所述预设图像特征保持一致的时长;
18、若所述时长达到预设时长,则判定所述闸机已经开启;
19、其中,所述闸机图像特征与所述预设图像特征一致表征所述闸机的开度为最大开度。
20、可选的,所述对所述图像信息进行图像识别,以判断所述目标停车场的闸机是否开启,包括:
21、识别所述图像信息中的闸机图像特征;
22、若当前所述闸机图像特征与第一图像特征一致,且下一个所述闸机图像特征与第二图像特征一致,则判定所述闸机已经开启;
23、其中,当前所述闸机图像特征与所述第一图像特征一致,表征所述闸机的开度大于预设开度;当前所述闸机图像特征与所述第一图像特征一致,且下一个所述闸机图像特征与所述第二图像特征一致,表征所述闸机的开度在变大。
24、可选的,所述车辆沿着目标停车场对应的记忆路线自动驾驶过程中,获取所述车辆的当前定位之前,还包括:
25、在所述车辆开启记忆泊车功能后,记忆所述车辆的行驶路线;
26、接收到闸机点设置信号后,获取所述车辆的当前位置,并将所述当前位置设置为所述目标位置;
27、接收到闸机图像记忆信号后,获取所述摄像头拍摄的闸机图像并保存;
28、所述车辆行驶至预设位置后,保存记忆的所述行驶路线,得到所述记忆路线。
29、可选的,所述对所述图像信息进行图像识别,以判断所述目标停车场的闸机是否开启之后,还包括:
30、若判定所述闸机未开启,则记录所述闸机未开启的持续时长;
31、若所述持续时长达到超时时长,则提醒用户接管所述车辆。
32、另一方面,本发明还提供如下技术方案:
33、一种自动泊车装置,包括:
34、获取模块,用于车辆沿着目标停车场对应的记忆路线自动驾驶过程中,获取所述车辆的当前定位;
35、控制模块,用于若所述当前定位为所述记忆路线上的目标位置,则控制所述车辆停车;
36、所述获取模块,还用于获取车载摄像头拍摄的所述车辆前方的图像信息;
37、判断模块,用于对所述图像信息进行图像识别,以判断所述目标停车场的闸机是否开启;
38、所述控制模块,还用于若判定所述闸机已经开启,则控制所述车辆沿着所述记忆路线继续行驶。
39、可选的,所述记忆路线为泊入路线或泊出路线。
40、可选的,所述记忆路线为泊出路线;
41、所述获取模块,还用于:
42、获取所述目标停车场的缴费二维码和所述车辆的车牌号;
43、扫描所述缴费二维码并结合所述车牌号获取所述车牌号对应的缴费信息;
44、在后台基于所述缴费信息完成缴费后,执行所述获取车载摄像头拍摄的所述车辆前方的图像信息的步骤。
45、可选的,所述判断模块,还用于:
46、识别所述图像信息中的闸机图像特征;
47、若所述闸机图像特征与预设图像特征一致,则获取所述闸机图像特征与所述预设图像特征保持一致的时长;
48、若所述时长达到预设时长,则判定所述闸机已经开启;
49、其中,所述闸机图像特征与所述预设图像特征一致表征所述闸机的开度为最大开度。
50、可选的,所述判断模块,还用于:
51、识别所述图像信息中的闸机图像特征;
52、若当前所述闸机图像特征与第一图像特征一致,且下一个所述闸机图像特征与第二图像特征一致,则判定所述闸机已经开启;
53、其中,当前所述闸机图像特征与所述第一图像特征一致,表征所述闸机的开度大于预设开度;当前所述闸机图像特征与所述第一图像特征一致,且下一个所述闸机图像特征与所述第二图像特征一致,表征所述闸机的开度在变大。
54、可选的,所述自动泊车装置还包括:
55、记忆模块,用于在所述车辆开启记忆泊车功能后,记忆所述车辆的行驶路线;
56、设置模块,用于接收到闸机点设置信号后,获取所述车辆的当前位置,并将所述当前位置设置为所述目标位置;
57、所述记忆模块,还用于接收到闸机图像记忆信号后,获取所述摄像头拍摄的闸机图像并保存;
58、所述车辆行驶至预设位置后,保存记忆的所述行驶路线,得到所述记忆路线。
59、可选的,所述自动泊车装置还包括:
60、计时模块,用于若判定所述闸机未开启,则记录所述闸机未开启的持续时长;
61、提醒模块,用于若所述持续时长达到超时时长,则提醒用户接管所述车辆。
62、另一方面,本发明还提供如下技术方案:
63、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一自动泊车方法。
64、另一方面,本发明还提供如下技术方案:
65、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在被处理器执行时实现上述任一自动泊车方法。
66、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
67、本发明在车辆沿着目标停车场对应的记忆路线自动驾驶过程中,获取车辆的当前定位;若当前定位为记忆路线上的目标位置,代表车辆抵达闸机处,则控制车辆停车;获取车载摄像头拍摄的车辆前方的图像信息;对图像信息进行图像识别,以判断目标停车场的闸机是否开启;若判定闸机已经开启,则控制车辆沿着记忆路线继续行驶;实现了车辆记忆泊车自动过停车场闸机的目的。
- 还没有人留言评论。精彩留言会获得点赞!