确定制动钳状态的方法、装置、电子设备及存储介质与流程
本公开涉及车辆领域,尤其涉及一种确定制动钳状态的方法、装置、电子设备及存储介质。
背景技术:
1、车辆的制动钳(也常被称为刹车卡钳)是具有使运动中的车辆减速、停止或使停止中的车辆保持停止状态的装置,通常在制动踏板被压下的情况下,车辆的制动钳被压向制动盘(也常被称为刹车盘)从而实现车辆制动的目的。在某些场景下,可能由于机械故障等原因,在制动踏板被抬起的情况下,车辆的制动钳仍然存在与制动盘脱离不彻底的拖滞现象,相关技术中缺少有效直观确定制动钳状态的方法,无法及时识别制动钳拖滞,容易造成制动盘过热,影响制动效果,导致车辆的安全性比较低。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种确定制动钳状态的方法、装置、电子设备及存储介质。
2、根据本公开实施例的第一方面,提供一种确定制动钳状态的方法,所述方法包括:
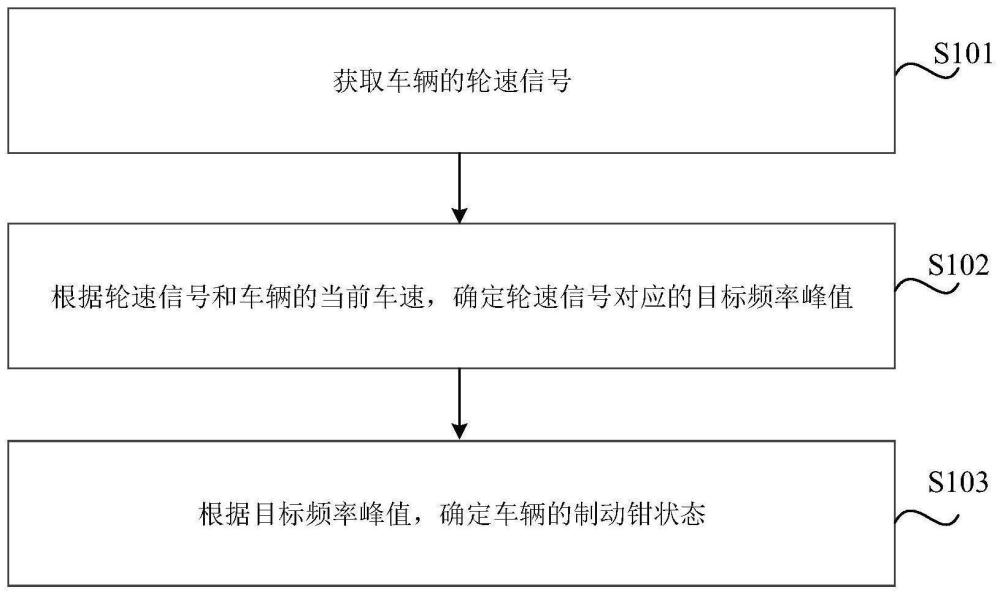
3、获取车辆的轮速信号;
4、根据所述轮速信号和所述车辆的当前车速,确定所述轮速信号对应的目标频率峰值;
5、根据所述目标频率峰值,确定所述车辆的制动钳状态,所述制动钳状态包括拖滞状态和非拖滞状态。
6、可选地,所述根据所述轮速信号和所述车辆的当前车速,确定所述轮速信号对应的目标频率峰值包括:
7、根据所述轮速信号、所述当前车速以及预设频谱估计模型,确定所述轮速信号对应的所述频谱信号;
8、根据所述频谱信号确定所述目标频率峰值。
9、可选地,所述根据所述目标频率峰值,确定所述车辆的制动钳状态包括:
10、获取预设频率峰值;
11、在所述目标频率峰值与所述预设频率峰值的差值大于或者等于预设差值阈值的情况下,确定所述车辆的制动钳状态为所述拖滞状态;或者,
12、在所述目标频率峰值与所述预设频率峰值的差值小于所述预设差值阈值的情况下,确定所述车辆的制动钳状态为所述非拖滞状态。
13、可选地,所述根据所述目标频率峰值,确定所述车辆的制动钳状态包括:
14、获取所述车辆的制动信号、转向信号以及加速度信号;
15、通过所述轮速信号和所述车辆的车轮尺寸,确定所述车辆的目标车速;
16、根据所述当前车速和所述目标车速,确定车速差值;
17、根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态。
18、可选地,所述根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态包括:
19、将所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述频率峰值输入预先生成的状态获取模型,以获取所述状态获取模型输出的所述车辆的制动钳状态。
20、可选地,所述状态获取模型通过以下方法预先生成:
21、获取多个样本集,所述样本集包括样本制动信号、样本转向信号、样本加速度信号、样本车速差值、样本频率峰值以及样本制动钳状态;
22、通过多个所述样本集对目标神经网络模型进行训练,生成所述状态获取模型。
23、可选地,所述根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态包括:
24、在所述车速差值处于预设差值范围内的情况下,根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态。
25、根据本公开实施例的第二方面,提供一种确定制动钳状态的装置,所述装置包括:
26、获取模块,被配置为获取车辆的轮速信号;
27、第一确定模块,被配置为根据所述轮速信号和所述车辆的当前车速,确定所述轮速信号对应的目标频率峰值;
28、第二确定模块,被配置为根据所述目标频率峰值,确定所述车辆的制动钳状态,所述制动钳状态包括拖滞状态和非拖滞状态。
29、可选地,所述第一确定模块,还被配置为:
30、根据所述轮速信号、所述当前车速以及预设频谱估计模型,确定所述轮速信号对应的所述频谱信号;
31、根据所述频谱信号确定所述目标频率峰值。
32、可选地,所述第二确定模块,还被配置为:
33、获取预设频率峰值;
34、在所述目标频率峰值与所述预设频率峰值的差值大于或者等于预设差值阈值的情况下,确定所述车辆的制动钳状态为所述拖滞状态;或者,
35、在所述目标频率峰值与所述预设频率峰值的差值小于所述预设差值阈值的情况下,确定所述车辆的制动钳状态为所述非拖滞状态。
36、可选地,所述第二确定模块,还被配置为:
37、获取所述车辆的制动信号、转向信号以及加速度信号;
38、通过所述轮速信号和所述车辆的车轮尺寸,确定所述车辆的目标车速;
39、根据所述当前车速和所述目标车速,确定车速差值;
40、根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态。
41、可选地,所述第二确定模块,还被配置为:
42、将所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述频率峰值输入预先生成的状态获取模型,以获取所述状态获取模型输出的所述车辆的制动钳状态。
43、可选地,所述第二确定模块,还被配置为:
44、获取多个样本集,所述样本集包括样本制动信号、样本转向信号、样本加速度信号、样本车速差值、样本频率峰值以及样本制动钳状态;
45、通过多个所述样本集对目标神经网络模型进行训练,生成所述状态获取模型。
46、可选地,所述第二确定模块,还被配置为:
47、在所述车速差值处于预设差值范围内的情况下,根据所述制动信号、所述转向信号、所述加速度信号、所述车速差值以及所述目标频率峰值,确定所述车辆的制动钳状态。
48、根据本公开实施例的第三方面,提供一种电子设备,包括:
49、存储器,其上存储有计算机程序;
50、处理器,用于执行所述存储器中的所述计算机程序,以实现第一方面中任一项所述方法的步骤。
51、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序指令,该程序指令被处理器执行时实现第一方面中任一项所述方法中的步骤。
52、本公开的实施例提供的技术方案可以包括以下有益效果:
53、本公开首先获取车辆的轮速信号,然后根据所述轮速信号和所述车辆的当前车速,确定所述轮速信号对应的目标频率峰值,最后根据所述目标频率峰值,确定所述车辆的制动钳状态。这样,能够准确确定车辆的制动钳状态,避免由于制动钳拖滞造成制动盘过热,影响制动效果,从而提高了车辆的安全性。
54、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
55、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!