车辆坡度计算方法及装置、电子设备、存储介质与流程
本申请涉及车辆,具体涉及一种车辆坡度计算方法及装置、电子设备、以及计算机可读存储介质。
背景技术:
1、随着车辆智能辅助驾驶功能越来越多,如智能坡道辅助、自动泊车、自适应巡航控制等功能都需要路面坡度值进行辅助。
2、在现有技术中,通常是根据获取车辆的传感器纵向加速度和车辆实际加速度值,根据公式反算当前车辆的坡度值,同时根据横向加速度及车辆动力学模型对计算坡度值进行修正。
3、但是,现有技术中的传统坡度计算方法并不能通用,特别是在车辆处于不同的工况场景下,根据现有技术计算得到的车辆坡度值结果与实际坡度值偏差较大。,因此亟待一种坡度计算准确率高,能够适应不同工况场景的车辆坡度计算方法。
技术实现思路
1、为解决上述技术问题,本申请的实施例提供了一种车辆坡度计算方法及装置、电子设备、以及计算机可读存储介质。
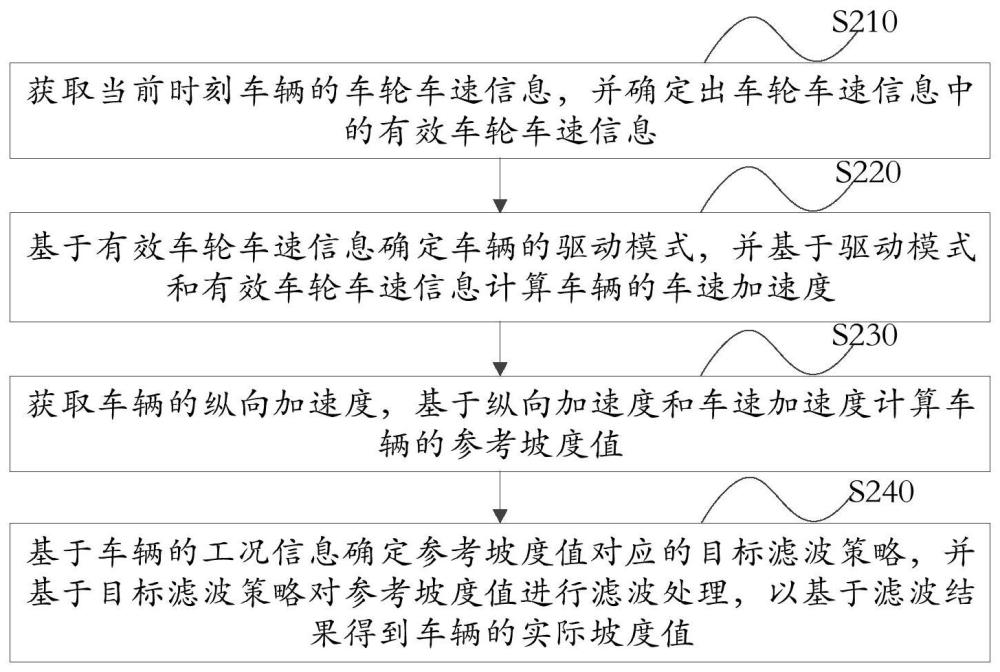
2、根据本申请实施例的一个方面,提供了一种车辆坡度计算方法,包括:获取当前时刻车辆的车轮车速信息,并确定出所述车轮车速信息中的有效车轮车速信息;基于所述有效车轮车速信息确定所述车辆的驱动模式,并基于所述驱动模式和所述有效车轮车速信息计算所述车辆的车速加速度;获取所述车辆的纵向加速度,基于所述纵向加速度和所述车速加速度计算所述车辆的参考坡度值;基于所述车辆的工况信息确定所述参考坡度值对应的目标滤波策略,并基于所述目标滤波策略对所述参考坡度值进行滤波处理,以基于滤波结果得到所述车辆的实际坡度值。
3、根据本申请实施例的一个方面,所述基于所述车辆的工况信息确定所述参考坡度值对应的目标滤波策略,包括:若所述车辆的工况信息满足预设典型工况的条件,则确定所述参考坡度值对应的目标滤波策略为第一滤波策略;若所述车辆的工况信息不满足预设典型工况的条件,则确定所述参考坡度值对应的目标策略为第二滤波策略,其中所述第二滤波策略的滤波周期小于所述第一滤波策略。
4、根据本申请实施例的一个方面,所述工况信息包括:油门深度、单位时间内油门深度的变化趋势以及单位时间内刹车深度的变化趋势,所述方法还包括:若所述车辆的油门深度达到预设油门深度阈值且所述车辆的车速达到预设车速阈值以上,则确定所述车辆的工况信息满足预设典型工况的条件;若所述车辆在单位时间内油门深度的变化趋势满足预设油门深度变化条件,则确定所述车辆的工况信息满足预设典型工况的条件;若所述车辆在单位时间内刹车深度的变化趋势满足预设刹车深度变化条件,则确定所述车辆的工况信息满足预设典型工况的条件。
5、根据本申请实施例的一个方面,所述工况信息包括:制动深度和电机转速,所述方法还包括:若所述车辆的制动深度达到预设制动深度阈值以上且所述车辆的车速未达到所述预设车速阈值以上,则确定所述车辆的工况信息满足预设典型工况的条件;若所述车辆的有效电机转速未达到预设转速以上,则确定所述车辆的工况信息满足预设典型工况的条件。
6、根据本申请实施例的一个方面,所述工况信息还包括所述车辆的同功能车轮之间的速度差的轮速差,所述方法还包括:若所述车辆的左前轮和右前轮之间的轮速差大于预设轮速差阈值,和/或,所述车辆的左后轮和右后轮之间的轮速差大于预设轮速差阈值,则确定所述车辆的工况信息满足预设典型工况的条件。
7、根据本申请实施例的一个方面,所述基于所述驱动模式和所述有效车轮车速信息计算所述车辆的车速加速度,包括:若所述车辆为四驱模式,则计算所述车辆的前轮车速和后轮车速之间的速度差,基于所述速度差、所述前轮车速以及所述后轮车速基于所述车辆的实际车速,以基于所述实际车速计算所述车辆的车速加速度;若所述车辆为两驱模式,则计算所述车辆的不同方向的驱动车轮的车速之间的速度差,基于所述速度差以及所述不同方向的驱动车轮的车速计算所述车辆的实际车速,以基于所述实际车速计算所述车辆的车速加速度。
8、根据本申请实施例的一个方面,所述方法还包括:若所述车辆为两驱模式且所述车辆的车轮车速无效时,则获取所述车轮对应的电机转速,以基于所述电机转速确定所述车轮的实际车速。
9、根据本申请实施例的一个方面,提供了一种车辆坡度计算装置,所述装置包括:获取模块,用于获取当前时刻车辆的车轮车速信息,并确定出所述车轮车速信息中的有效车轮车速信息;驱动确定模块,用于基于所述有效车轮车速信息确定所述车辆的驱动模式,并基于所述驱动模式和所述有效车轮车速信息计算所述车辆的车速加速度;计算模块,用于获取所述车辆的纵向加速度,基于所述纵向加速度和所述车速加速度计算所述车辆的参考坡度值;滤波模块,用于基于所述车辆的工况信息确定所述参考坡度值对应的目标滤波策略,并基于所述目标滤波策略对所述参考坡度值进行滤波处理,以基于滤波结果得到所述车辆的实际坡度值。
10、根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如前所述的车辆坡度计算方法。
11、根据本申请实施例的一个方面,提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如上所述的车辆坡度计算方法。
12、在本申请的实施例所提供的技术方案中,通过车辆驱动模式以及车辆的有效车轮车速信息计算车辆的车速加速度,避免了在车速信号失效时,造成计算得到的坡度值不准确,并且根据工况场景的不同执行不同的滤波策略,提高了计算得到的坡度值的准确性,并且提高坡度算法的鲁棒性,提升了所计算得到的车辆坡度值的精准性。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种车辆坡度计算方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述基于所述车辆的工况信息确定所述参考坡度值对应的目标滤波策略,包括:
3.如权利要求2所述的方法,其特征在于,所述工况信息包括:油门深度、单位时间内油门深度的变化趋势以及单位时间内刹车深度的变化趋势,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述工况信息包括:制动深度和电机转速,所述方法还包括:
5.如权利要求4所述的方法,其特征在于,所述工况信息还包括所述车辆的同功能车轮之间的速度差的轮速差,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述基于所述驱动模式和所述有效车轮车速信息计算所述车辆的车速加速度,包括:
7.如权利要求6所述的方法,其特征在于,所述方法还包括:
8.一种车辆坡度计算装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行权利要求1至7中任一项所述的车辆坡度计算方法。
技术总结
本申请的实施例揭示了一种车辆坡度计算方法及装置、电子设备、存储介质。该方法包括:获取当前时刻车辆的车轮车速信息,并确定出车轮车速信息中的有效车轮车速信息;基于有效车轮车速信息确定车辆的驱动模式,并基于驱动模式和有效车轮车速信息计算车辆的车速加速度;获取车辆的纵向加速度,基于纵向加速度和车速加速度计算车辆的参考坡度值;基于车辆的工况信息确定参考坡度值对应的目标滤波策略,并基于目标滤波策略对参考坡度值进行滤波处理,以基于滤波结果得到车辆的实际坡度值。本申请的实施例能够据工况场景的不同执行不同的滤波策略,能够保证不同工况场景下对车辆坡度值计算的准确性。
技术研发人员:徐浩,徐姗,陈立华,李欢,喻常静,刘东升
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!