一种牵引挂车折叠控制方法、装置、设备和牵引挂车与流程
本发明涉及汽车控制,具体涉及一种牵引挂车折叠控制方法、装置、设备和牵引挂车。
背景技术:
1、目前传统配置了amt的牵引车在车辆转弯时由于车辆负载增大,为了避免车辆升挡后动力不足,一般会基于方向盘转角进行换挡补偿控制。
2、方向盘转角在普通载货车上可以体现车辆转弯起步情况,如图1所示。
3、对于牵引挂车,存在方向盘回正牵引车与挂车存在夹角情况,如图2所示。方向盘转角不能真实体现车辆起步情况,基于方向盘转角转速控制也就无法覆盖图2所示的牵引挂车的所处工况,容易出现牵引车折叠起步时动力不足而导致的起步失败的情况。
技术实现思路
1、有鉴于此,本发明实施例提供一种牵引挂车折叠控制方法、装置、设备和牵引挂车,以实现牵引挂车能够可靠的折叠起步。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、一种牵引挂车折叠控制方法,包括:
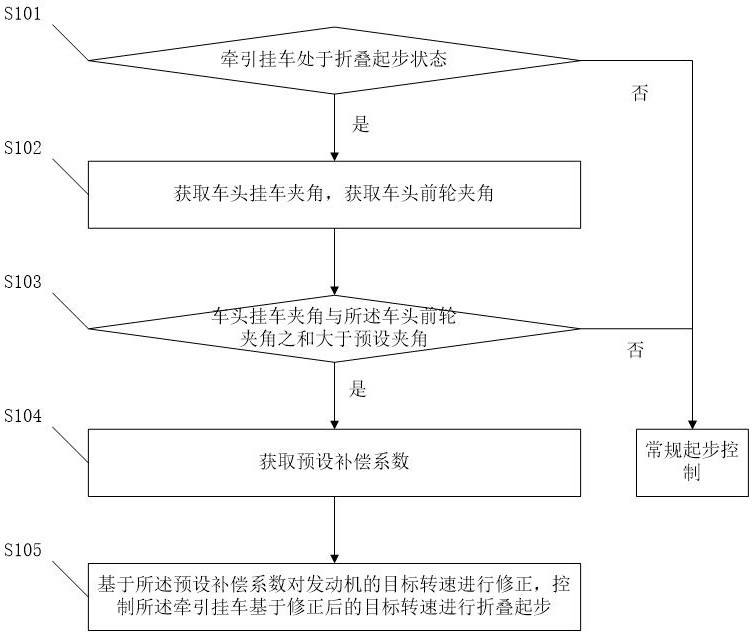
4、判断牵引挂车是否处于折叠起步状态,当处于所述折叠起步状态时,获取车头挂车夹角,获取车头前轮夹角;
5、判断所述车头挂车夹角与所述车头前轮夹角之和是否大于预设夹角;
6、当大于所述预设夹角时,获取预设补偿系数;
7、基于所述预设补偿系数对发动机的目标转速进行修正,控制所述牵引挂车基于修正后的目标转速进行折叠起步。
8、可选的,上述牵引挂车折叠控制方法中,判断所述车头挂车夹角与所述车头前轮夹角之和是否大于预设夹角之前,还包括:
9、获取牵引挂车的车重;
10、获取与所述车重相匹配的预设夹角。
11、可选的,上述牵引挂车折叠控制方法中,获取预设补偿系数,包括:
12、基于预设映射表获取与所述车头挂车夹角、所述车头前轮夹角相匹配的预设补偿系数,所述预设映射表中记载有与所述车头挂车夹角、所述车头前轮夹角相匹配的预设补偿系数。
13、可选的,上述牵引挂车折叠控制方法中,还包括:
14、判断所述牵引挂车是否起步失败;
15、当起步失败时,将目标转速的转速值增加起步转速补偿值,并继续执行步骤:判断牵引挂车是否处于折叠起步状态以及后续步骤。
16、可选的,上述牵引挂车折叠控制方法中,还包括:
17、当起步成功后,将发动机转速恢复至初始状态时的目标转速。
18、可选的,上述牵引挂车折叠控制方法中,所述将目标转速的转速值增加起步转速补偿值,包括:
19、获取起步过程中的发动机最低转速,获取与所述发动机最低转速相匹配的起步转速补偿值,所述发动机最低转速不同,对应的起步转速补偿值不同。
20、可选的,上述牵引挂车折叠控制方法中,获取车头前轮夹角,包括:
21、获取方向盘转角;
22、获取与所述方向盘转角相匹配的转向轮夹角。
23、一种牵引挂车折叠控制装置,包括:
24、角度分析单元,用于当牵引挂车处于折叠起步状态时,获取车头挂车夹角,获取车头前轮夹角;
25、控制模式选择单元,判断所述车头挂车夹角与所述车头前轮夹角之和是否大于预设夹角,当大于所述预设夹角时,向转速补偿单元输出触发信号;
26、转速补偿单元,用于在获取到所述控制模式选择单元输出的触发信号后,基于所述预设补偿系数对发动机的目标转速进行修正,以使得所述牵引挂车基于修正后的目标转速进行折叠起步。
27、一种牵引挂车折叠控制设备,包括存储器和处理器;
28、所述存储器,用于存储程序;
29、所述处理器,用于执行所述程序,实现上述任一项所述的牵引挂车折叠控制方法的各个步骤。
30、一种牵引挂车,应用有上述牵引挂车折叠控制设备。
31、基于上述技术方案,本发明实施例提供的上述方案,当确定牵引挂车处于折叠起步状态时,如果车头挂车夹角与所述车头前轮夹角之和大于预设夹角,则获取预设补偿系数,采用所述预设补偿系数对发动机的目标转速进行修正,控制牵引挂车采用修正后的目标转速进行折叠起步,从而增大了折叠起步过程中的发动机转速,提高了折叠起步的成功率。
技术特征:
1.一种牵引挂车折叠控制方法,其特征在于,包括:
2.根据权利要求1所述的牵引挂车折叠控制方法,其特征在于,判断所述车头挂车夹角与所述车头前轮夹角之和是否大于预设夹角之前,还包括:
3.根据权利要求1所述的牵引挂车折叠控制方法,其特征在于,获取预设补偿系数,包括:
4.根据权利要求1所述的牵引挂车折叠控制方法,其特征在于,还包括:
5.根据权利要求4所述的牵引挂车折叠控制方法,其特征在于,还包括:
6.根据权利要求4所述的牵引挂车折叠控制方法,其特征在于,所述将目标转速的转速值增加起步转速补偿值,包括:
7.根据权利要求1所述的牵引挂车折叠控制方法,其特征在于,获取车头前轮夹角,包括:
8.一种牵引挂车折叠控制装置,其特征在于,包括:
9.一种牵引挂车折叠控制设备,其特征在于,包括存储器和处理器;
10.一种牵引挂车,其特征在于,应用有权利要求9所述的牵引挂车折叠控制设备。
技术总结
本发明提供一种牵引挂车折叠控制方法、装置、设备和牵引挂车,当确定牵引挂车处于折叠起步状态时,如果车头挂车夹角与所述车头前轮夹角之和大于预设夹角,则获取预设补偿系数,采用所述预设补偿系数对发动机的目标转速进行修正,控制牵引挂车采用修正后的目标转速进行折叠起步,从而增大了折叠起步过程中的发动机转速,提高了折叠起步的成功率。
技术研发人员:陈彦波,窦站成,栾军山,李俊琦
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!