电机转矩控制方法、装置、设备及存储介质与流程
本技术属于电机控制,尤其涉及一种电机转矩控制方法、装置、设备及存储介质。
背景技术:
1、由于电动汽车的制动踏板被踩下时会衰减蠕动转矩,不仅使再换档起步的过程时间变长,而且会由于动力输出中断车辆顿挫,因此目前电动汽车没有变速器和离合器,在极低车速下,驾驶员不踩制动踏板即可实现d档与r档之间的灵活切换,进而灵活控制车辆前后移动。
2、极低车速d档与r档切换时整车控制单元(vehicle control unit,vcu)对电机控制单元(motor control unit,mcu)转矩的控制极其复杂,在该工况下,vcu对mcu的请求转矩会由负值向正值变换或者由正值向负值变换,由于传动系统间隙客观存在,因此电机转矩过零点时齿轮啮合会导致电机抖动。
技术实现思路
1、本技术的实施例提供了一种电机转矩控制方法、装置、设备及存储介质,进而至少在一定程度上可以减少极低车速d档与r档切换时电机的抖动。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的第一方面,提供了一种电机转矩控制方法,包括:
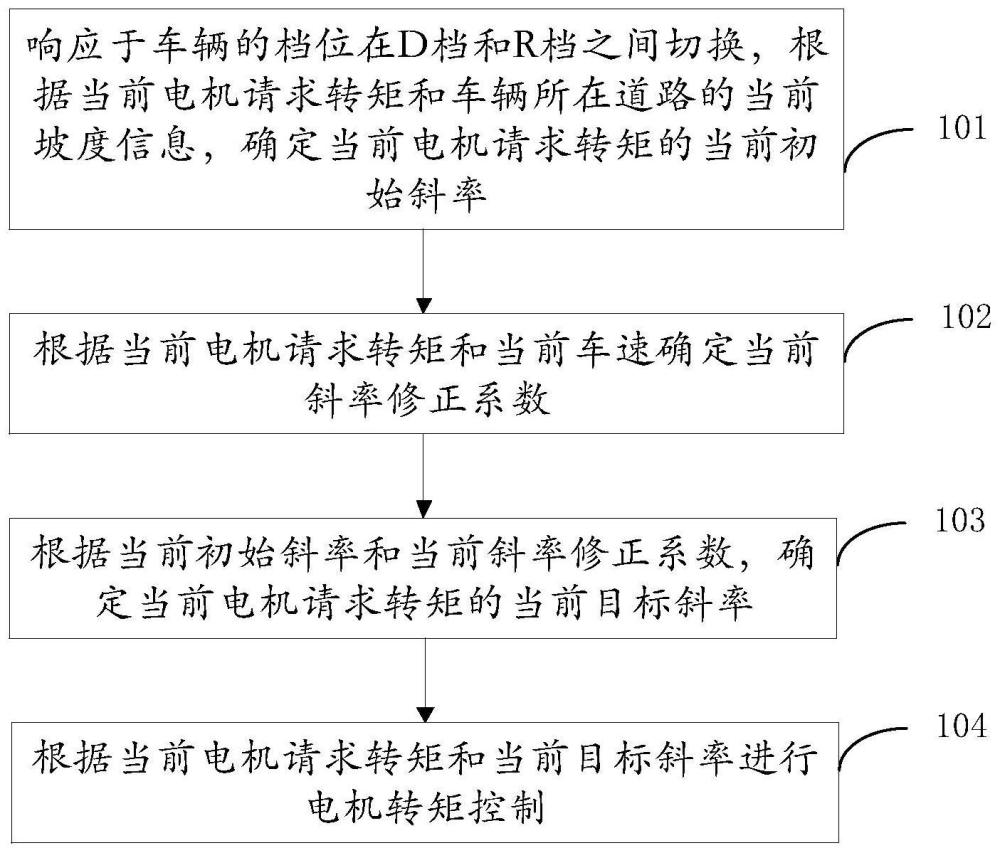
4、响应于车辆的档位在d档和r档之间切换,根据当前电机请求转矩和所述车辆所在道路的当前坡度信息,确定所述当前电机请求转矩的当前初始斜率;
5、根据所述当前电机请求转矩和当前车速确定当前斜率修正系数;
6、根据所述当前初始斜率和所述当前斜率修正系数,确定所述当前电机请求转矩的当前目标斜率;
7、根据所述当前电机请求转矩和所述当前目标斜率进行电机转矩控制。
8、在本技术的一些实施例中,基于前述方案,所述根据当前电机请求转矩和所述车辆所在道路的当前坡度信息,确定所述当前电机请求转矩的当前初始斜率,包括:
9、在第一预设映射表中查找所述当前电机请求转矩和所述当前坡度信息对应的初始斜率;
10、将查找到的初始斜率确定为所述当前初始斜率。
11、在本技术的一些实施例中,基于前述方案,电机转矩控制方法还包括:
12、根据第一预设规则标定不同电机请求转矩和坡度信息对应的初始斜率,其中,所述第一预设规则为电机请求转矩越趋向于零,初始斜率越小且不为零,以及坡度信息越大,初始斜率越小;
13、根据电机请求转矩和坡度信息对应的初始斜率生成所述第一预设映射表。
14、在本技术的一些实施例中,基于前述方案,所述根据所述当前电机请求转矩和当前车速确定当前斜率修正系数,包括:
15、在第二预设映射表中查找所述当前电机请求转矩和所述当前车速对应的斜率修正系数;
16、将查找到的斜率修正系数确定为所述当前斜率修正系数。
17、在本技术的一些实施例中,基于前述方案,电机转矩控制方法还包括:
18、根据第二预设规则标定不同电机请求转矩和车速对应的斜率修正系数,其中,所述第二预设规则为电机请求转矩越趋向于零,斜率修正系数越小且不为零;
19、根据电机请求转矩和车速对应的斜率修正系数生成所述第二预设映射表。
20、在本技术的一些实施例中,基于前述方案,电机转矩控制方法还包括:
21、在当前电机实际转矩、当前车速或当前油门踏板开度满足预设条件的情况下,退出电机转矩控制。
22、在本技术的一些实施例中,基于前述方案,所述预设条件包括所述在当前档位信息为r档的情况下,所述当前实际转矩小于r档对应的转矩阈值或所述当前车速小于r档对应的车速阈值;或者,在所述当前档位信息为d档的情况下,所述当前实际转矩大于d档对应的转矩阈值或所述当前车速大于d档对应的车速阈值。
23、根据本技术实施例的第二方面,提供了一种电机转矩控制装置,包括:
24、初始斜率确定单元,用于响应于车辆的档位在d档和r档之间切换,根据当前电机请求转矩和所述车辆所在道路的当前坡度信息,确定所述当前电机请求转矩的当前初始斜率;
25、斜率修正单元,用于根据所述当前电机请求转矩和当前车速确定当前斜率修正系数;
26、目标斜率确定单元,用于根据所述当前初始斜率和所述当前斜率修正系数,确定所述当前电机请求转矩的当前目标斜率;
27、转矩控制单元,用于根据所述当前电机请求转矩和所述当前目标斜率进行电机转矩控制。
28、在本技术的一些实施例中,基于前述方案,初始斜率确定单元,还用于在第一预设映射表中查找所述当前电机请求转矩和所述当前坡度信息对应的初始斜率;将查找到的初始斜率确定为所述当前初始斜率。
29、在本技术的一些实施例中,基于前述方案,初始斜率确定单元,还用于根据第一预设规则标定不同电机请求转矩和坡度信息对应的初始斜率,其中,所述第一预设规则为电机请求转矩越趋向于零,初始斜率越小且不为零,以及坡度信息越大,初始斜率越小;根据电机请求转矩和坡度信息对应的初始斜率生成所述第一预设映射表。
30、在本技术的一些实施例中,基于前述方案,斜率修正单元,还用于在第二预设映射表中查找所述当前电机请求转矩和所述当前车速对应的斜率修正系数;将查找到的斜率修正系数确定为所述当前斜率修正系数。
31、在本技术的一些实施例中,基于前述方案,斜率修正单元,还用于根据第二预设规则标定不同电机请求转矩和车速对应的斜率修正系数,其中,所述第二预设规则为电机请求转矩越趋向于零,斜率修正系数越小且不为零;根据电机请求转矩和车速对应的斜率修正系数生成所述第二预设映射表。
32、在本技术的一些实施例中,基于前述方案,转矩控制单元,还用于在当前电机实际转矩、当前车速或当前油门踏板开度满足预设条件的情况下,退出电机转矩控制。
33、在本技术的一些实施例中,基于前述方案,所述预设条件包括所述在当前档位信息为r档的情况下,所述当前实际转矩小于r档对应的转矩阈值或所述当前车速小于r档对应的车速阈值;或者,在所述当前档位信息为d档的情况下,所述当前实际转矩大于d档对应的转矩阈值或所述当前车速大于d档对应的车速阈值。
34、根据本技术实施例的第三方面,提供了一种电机转矩控制设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机程序指令,所述处理器执行所述计算机程序指令时,实现如上述第一方面任一项所述的方法的步骤。
35、根据本技术实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序指令,所述计算机程序指令被处理器执行时,促使所述处理器实现如上述第一方面任一项所述的方法的步骤。
36、在本技术中,通过响应于车辆的档位在d档和r档之间切换,根据当前电机请求转矩和所述车辆所在道路的当前坡度信息,确定所述当前电机请求转矩的当前初始斜率;根据所述当前电机请求转矩和当前车速确定当前斜率修正系数;根据所述当前初始斜率和所述当前斜率修正系数,确定所述当前电机请求转矩的当前目标斜率;根据所述当前电机请求转矩和所述当前目标斜率进行电机转矩控制。通过本技术提供的技术方案能够在d档和r档之间切换的工况下,对电机请求转矩作平滑处理,减少电机抖动。
37、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!