一种两栖作业船智能控制系统及方法与流程
本发明属于水域清理机械,具体涉及两栖作业船智能控制系统及方法。
背景技术:
1、从许多国家的实际情况来看,虽然世界诸多海洋国家都曾在不同时期遭受过浒苔大量聚集的困扰,目前世界上关于浒苔治理的措施主要是加强跟踪监测和加大打捞力度,浒苔聚集并未形成普遍的社会问题意识。总体来看,由政府全面主导的浒苔清理,其效果在世界各国显然普遍不佳。
2、因为近海区域的漂浮浒苔大船舶无法靠近,目前作业方式主要是两种:其一,当随着潮水退去后,当沙滩滞留浒苔较密集时,直接由装载机直接沿着沙滩表面推过对浒苔进行清理;其二,通过人工使用耙等农具将浒苔与海水分离,随后装入跟随作业人员行驶的装载机的铲斗中,完成对浒苔的清理。综上所述现有技术中存在近海区域浒苔清理困难以及需要大量人力资源的问题。
技术实现思路
1、本发明的目的在于提供一种两栖作业船智能控制系统及方法,以解决近海区域浒苔清理困难的技术问题。
2、为达到上述目的,第一方面本发明所采用的技术方案是:
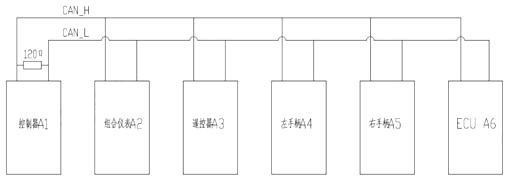
3、一种两栖作业船智能控制系统,包括控制器a1、左手柄控制单元a4、右手柄控制单元a5、油门调速r1和发动机电控单元a6;所述左手柄控制单元a4、右手柄控制单元a5和发动机电控单元a6通过can总线与控制器a1连接;所述油门调速r1与所述控制器a1的输入端电性连接;电源单元gb为控制器a1、左手柄控制单元a4、右手柄控制单元a5和发动机电控单元a6供电;
4、所述控制器a1的输出端与液压控制系统电性连接,所述液压控制系统用于控制两栖作业船中驱动系统的行驶方向;所述控制器a1根据接收左手柄控制单元a4、右手柄控制单元a5和油门调速r1的输出信号,通过所述液压驱动系统控制两栖作业船的驱动系统动作;所述驱动系统与发动机传动连接,所述发动机电控单元a6控制发动机动作;
5、所述控制器a1电性控制水泵,割草马达和升降工作机;所述升降工作机驱动所述割草马达升降,所述割草马达带动切割刀转动;所述水泵用于排出两栖作业船中船舱里的水。
6、优选的,所述钥匙开关sa4一端通过电源继电器ka1的开关与电源单元gb的正极电性连接;钥匙开关sa4的on端和start端分别接入控制器a1的输入端。
7、优选的,所述控制器a1的输入端ai4通过电源开关sb9与电源单元gb的正极电性连接;所述系统继电器ka5的开关一端连接至电源开关sb9与电源单元gb之间;所述系统继电器ka5的开关另一端电性连接电源继电器ka1的线圈,所述电源继电器ka1的线圈接地;单向二极管的输入端连接至所述控制器a1的输入端ai4与电源开关sb9之间,所述单向二极管的输出端连接至所述系统继电器ka5的开关和电源继电器ka1的线圈之间;所述继电器ka5的线圈一端连接所述控制器a1的输入端do4,所述继电器ka5的线圈另一端接地。
8、优选的,启动继电器km0的开关一端连接电源单元gb的正极,所述启动继电器km0的开关另一端连接发动机起动机mo,发动机起动机mo和启动继电器km0的线圈接地,并且所述启动继电器km0的线圈依次连接继电器ka2的开关和熔断器fu;所述熔断器fu通过电源继电器ka1的开关与电源单元gb的正极电性连接;所述继电器ka2的线圈一端连接至控制器a1的输入端do4,所述继电器ka2的线圈另一端接地。
9、优选的,左侧灯el1和右侧灯el2的一端接地;所述左侧灯el1和右侧灯el2的另一端电性连接转换开关sa5;所述转换开关sa5通过电源继电器ka1的开关与电源单元gb的正极电性连接。
10、优选的,喇叭的一端接地,所述喇叭的另一端电性连接按钮开关sb6;所述按钮开关sb6通过电源继电器ka1的开关与电源单元gb的正极电性连接。
11、优选的,水泵m1、水泵m2、水泵m3和水泵m4的一端接地,所述水泵m1、水泵m2、水泵m3和水泵m4的另一端电性连接水泵继电器ka6的开关;所述水泵继电器ka6的开关通过电源继电器ka1的开关与电源单元gb的正极电性连接;所述水泵继电器ka6的线圈一端连接所述控制器a1的输入端do5,所述水泵继电器ka6的线圈另一端接地。
12、优选的,割草马达开启按钮sb1、割草马达关闭按钮sb2、割草马达反转按钮sb3、调平前移按钮sb4,调平后移按钮sb5一端电性连接至所述控制器a1的输入端,所述割草马达开启按钮sb1、割草马达关闭按钮sb2、割草马达反转按钮sb3、调平前移按钮sb4,调平后移按钮sb5另一端电性通过电源继电器ka1的开关与电源单元gb的正极电性连接;
13、控制器a1的接收到割草马达开启按钮sb1的输入信号后,控制割草马达启动;控制器a1的接收到割草马达关闭按钮sb2的输入信号后,控制割草马达关闭;控制器a1的接收到割草马达反转按钮sb3的输入信号后,控制割草马达反转;当控制器a1的接收到调平前移按钮sb4的输入信号,控制升降工作机上升;当控制器a1的接收到调平后移按钮sb5的输入信号,控制升降工作机下降。
14、优选的,还包括can遥控单元和组合仪表单元;所述can遥控单元和组合仪表单元can总线与控制器a1电性连接;遥控转换开关sa3一端电性连接至所述控制器a1的输入端,遥控转换开关sa3另一端通过电源继电器ka1的开关与电源单元gb的正极电性连接。
15、第二方面本发明提供了一种两栖作业船智能控制系统的控制方法,包括:
16、启动两栖作业船智能控制系统;根据接收左手柄控制单元a4、右手柄控制单元a5和油门调速r1的输出信号,通过所述液压驱动系统控制两栖作业船的驱动系统动作;通过发动机电控单元a6控制发动机的输出功率;所述发动机用于为驱动系统提供动能;
17、控制升降工作机驱动割草马达升降,通过割草马达带动切割刀转动;控制水泵动作调节两栖作业船中船舱里的水量。
18、与现有技术相比,本发明所达到的有益效果:
19、本发明所述控制器a1电性控制水泵,割草马达和升降工作机;所述升降工作机驱动所述割草马达升降,所述割草马达带动切割刀转动;所述水泵用于排出两栖作业船中船舱里的水;根据近海区域的水位控制水泵动作调节两栖作业船中船舱里的水量,使两栖作业船可以适用不同深度近海区域的作业环境;控制升降工作机驱动割草马达升降,通过割草马达带动切割刀转动,实现对不同深度水生植物的切割。
20、本发明中所述控制器a1的输出端与液压控制系统电性连接,所述液压控制系统用于控制两栖作业船中驱动系统的行驶方向;所述控制器a1根据接收左手柄控制单元a4、右手柄控制单元a5和油门调速r1的输出信号,通过所述液压驱动系统控制两栖作业船的驱动系统动作;所述驱动系统与发动机传动连接,所述发动机电控单元a6控制发动机动作;实现对两栖作业船自动电动控制,有效的整合了动力系统、液压系统和电气系统,使整船工作更高效,运行更安全。
技术特征:
1.一种两栖作业船智能控制系统,其特征在于,包括控制器a1、左手柄控制单元a4、右手柄控制单元a5、油门调速r1和发动机电控单元a6;所述左手柄控制单元a4、右手柄控制单元a5和发动机电控单元a6通过can总线与控制器a1连接;所述油门调速r1与所述控制器a1的输入端电性连接;电源单元gb为控制器a1、左手柄控制单元a4、右手柄控制单元a5和发动机电控单元a6供电;
2.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,所述钥匙开关sa4一端通过电源继电器ka1的开关与电源单元gb的正极电性连接;钥匙开关sa4的on端和start端分别接入控制器a1的输入端。
3.根据权利要求2所述的两栖作业船智能控制系统,其特征在于,所述控制器a1的输入端ai4通过电源开关sb9与电源单元gb的正极电性连接;所述系统继电器ka5的开关一端连接至电源开关sb9与电源单元gb之间;所述系统继电器ka5的开关另一端电性连接电源继电器ka1的线圈,所述电源继电器ka1的线圈接地;单向二极管的输入端连接至所述控制器a1的输入端ai4与电源开关sb9之间,所述单向二极管的输出端连接至所述系统继电器ka5的开关和电源继电器ka1的线圈之间;所述继电器ka5的线圈一端连接所述控制器a1的输入端do4,所述继电器ka5的线圈另一端接地。
4.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,启动继电器km0的开关一端连接电源单元gb的正极,所述启动继电器km0的开关另一端连接发动机起动机mo,发动机起动机mo和启动继电器km0的线圈接地,并且所述启动继电器km0的线圈依次连接继电器ka2的开关和熔断器fu;所述熔断器fu通过电源继电器ka1的开关与电源单元gb的正极电性连接;所述继电器ka2的线圈一端连接至控制器a1的输入端do4,所述继电器ka2的线圈另一端接地。
5.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,左侧灯el1和右侧灯el2的一端接地;所述左侧灯el1和右侧灯el2的另一端电性连接转换开关sa5;所述转换开关sa5通过电源继电器ka1的开关与电源单元gb的正极电性连接。
6.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,喇叭的一端接地,所述喇叭的另一端电性连接按钮开关sb6;所述按钮开关sb6通过电源继电器ka1的开关与电源单元gb的正极电性连接。
7.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,水泵m1、水泵m2、水泵m3和水泵m4的一端接地,所述水泵m1、水泵m2、水泵m3和水泵m4的另一端电性连接水泵继电器ka6的开关;所述水泵继电器ka6的开关通过电源继电器ka1的开关与电源单元gb的正极电性连接;所述水泵继电器ka6的线圈一端连接所述控制器a1的输入端do5,所述水泵继电器ka6的线圈另一端接地。
8.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,割草马达开启按钮sb1、割草马达关闭按钮sb2、割草马达反转按钮sb3、调平前移按钮sb4,调平后移按钮sb5一端电性连接至所述控制器a1的输入端,所述割草马达开启按钮sb1、割草马达关闭按钮sb2、割草马达反转按钮sb3、调平前移按钮sb4,调平后移按钮sb5另一端电性通过电源继电器ka1的开关与电源单元gb的正极电性连接;
9.根据权利要求1所述的两栖作业船智能控制系统,其特征在于,还包括can遥控单元和组合仪表单元;所述can遥控单元和组合仪表单元can总线与控制器a1电性连接;遥控转换开关sa3一端电性连接至所述控制器a1的输入端,遥控转换开关sa3另一端通过电源继电器ka1的开关与电源单元gb的正极电性连接。
10.权利要求1至9任一项所述的两栖作业船智能控制系统的控制方法,其特征在于,包括:
技术总结
本发明公开了一种两栖作业船智能控制系统及方法,包括:控制器A1的输出端与液压控制系统电性连接,所述液压控制系统用于控制两栖作业船中驱动系统的行驶方向;所述控制器A1根据接收左手柄控制单元A4、右手柄控制单元A5和油门调速R1的输出信号,通过所述液压驱动系统控制两栖作业船的驱动系统动作;所述驱动系统与发动机传动连接,所述发动机电控单元A6控制发动机动作;所述控制器A1电性控制水泵,割草马达和升降工作机;所述升降工作机驱动所述割草马达升降,所述割草马达带动切割刀转动;所述水泵用于排出两栖作业船中船舱里的水;实现对两栖作业船自动电动控制,有效的整合了动力系统、液压系统和电气系统,使整船工作更高效,运行更安全。
技术研发人员:孙进,许海川,刘昆
受保护的技术使用者:徐州徐工环境技术有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!