一种周围车辆驾驶行为意图的推断方法、系统及设备
本发明属于车辆智能驾驶,具体地说涉及一种周围车辆驾驶行为意图的推断方法、系统及设备。
背景技术:
1、由于经济快速发展,道路上的车辆越来越多,交通事故频发,驾驶员以及周围车辆驾驶员的安全难以得到有效保障。根据驾驶员的行为意图,车辆驾驶行为可分为:左换道、直行和右换道,而换道不仅改变了自车的驾驶行为,还会对周围车辆的驾驶行为产生影响,在换道时因失误或失察而导致的事故较多。因此,如何准确推断出周围车辆驾驶行为意图,从而提高自车换道的安全性、避免发生交通事故成为了亟需解决的问题。
技术实现思路
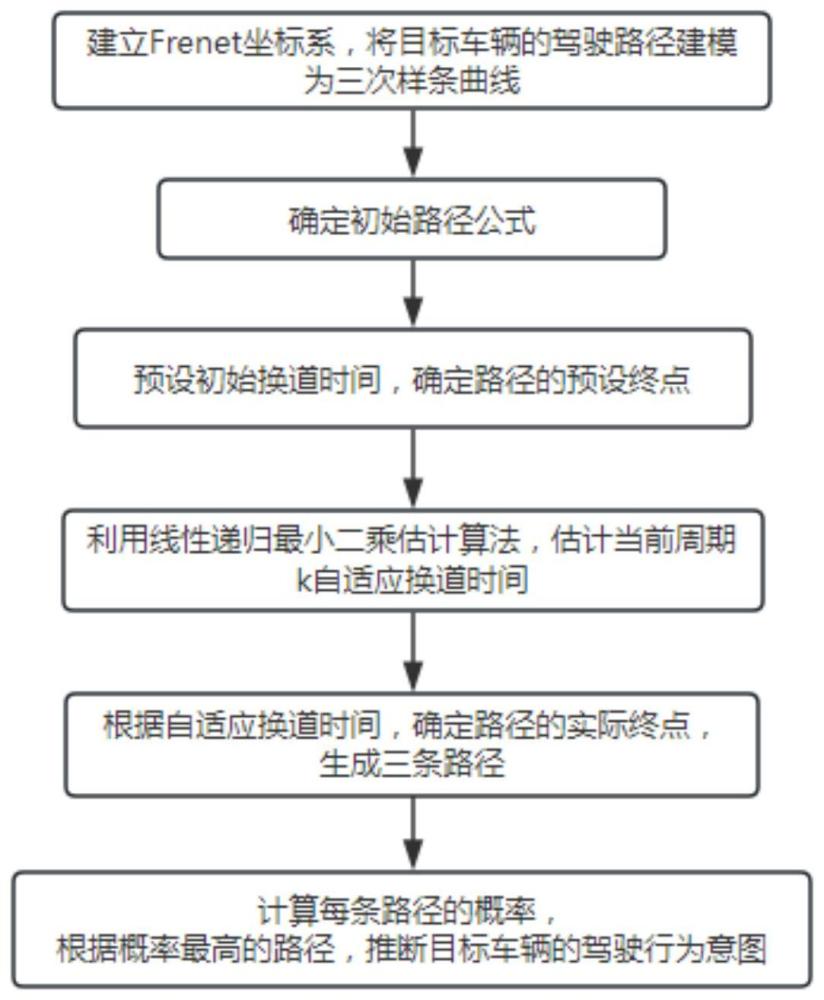
1、本发明设计了一种周围车辆驾驶行为意图的推断方法,包括以下步骤:
2、步骤1:建立以s轴、q轴为坐标轴的frenet坐标系,将目标车辆的驾驶路径建模为三次样条曲线;
3、步骤2:获取目标车辆在坐标系中的位置(st,qt)和初始航向角θt,确定初始路径公式(1):
4、q(s)=a(s-st)3+b(s-st)2+c(s-st)+d,(st≤s≤sf) (1)
5、所述路径的起点坐标为(st,qt)、终点坐标为(sf,qf),其中,qf=qi,i=1,2,3,所述qi为每个车道中心线对应的q值,所述s的取值范围为[st,sf],所述a、b、c、d表示系数;
6、步骤3:获取所述终点sf的计算公式(3):
7、sf=vttprev+st (3)
8、其中,vt表示目标车辆的纵向速度,tprev表示换道时间,sf-st表示目标车辆从换道开始至换道完成所行驶的纵向距离;
9、预设初始换道时间tprev,
10、根据初始换道时间tprev和终点sf的计算公式,获取路径的预设终点sf;
11、步骤4:获取系数a、b、c、d的计算公式(4),
12、
13、根据系数a、b、c、d的计算公式,确定初始路径的唯一形状;
14、步骤5:获取当前周期k,利用线性递归最小二乘估计算法,根据公式(1)、公式(3)和公式(4),估计当前周期k自适应换道时间tprev,k,
15、根据公式(3)和tprev,k,获得路径的实际终点sf;
16、步骤6:根据路径的实际终点sf得到三条路径,计算每条路径的概率,
17、根据概率最高的路径,推断目标车辆的驾驶行为意图。
18、与现有技术相比,本发明的有益效果在于:获取当前周期k的三条路径及其概率后,在以后的每个周期更新一次三条路径及其概率,并获取其中概率最高的一条路径,重新推断目标车辆的驾驶行为意图,有利于提高推断结果的准确性。通过本发明的推断方法,能够对周围车辆的驾驶行为意图进行推断,提前预判周围车辆的驾驶轨迹(左换道或直行或右换道),从而对自车的换道轨迹进行规划,有利于提高自车换道时的安全性,避免发生交通事故,保障道路安全。
19、优选的,获取初始路径的四个边界条件,根据所述边界条件,获取系数a、b、c、d的计算公式;
20、所述边界条件为:
21、
22、其中,q(st)=qt表示初始路径的起点边界;表示初始路径起点的斜率,θt表示目标车辆的初始航向角;q(sf)=qi表示初始路径的终点边界,qi表示每个车道中心到s轴的距离;表示初始路径终点的斜率;
23、根据所述四个边界条件获取系数a、b、c、d的计算公式。
24、优选的,根据公式(1)、公式(3)和公式(4),获取系数a的变形公式(5)和b的变形公式(6):
25、
26、
27、根据公式(5)和公式(6),将公式(1)变形得到公式(7a):
28、
29、所述公式(7a)表示为与换道时间tprev相关的路径,θk为换道时间的倒数,其中,ak、bk、ck、dk分别对应系数a、b、c、d,根据公式(4)、(5)和公式(6),得到ak、bk、ck、dk的计算公式:
30、
31、
32、
33、dk=c(sk-st)+d (7e)
34、其中,vt为目标车辆在初始路径起点处的纵向速度值,所述vt为恒定值,(sk,qk)为当前周期k时目标车辆的坐标,qf为路径终点的q值,st路径起点的s值。
35、优选的,利用递归最小二乘法对参数θ进行自适应估计,递归公式为:
36、
37、其中,为公式(7a)中θk的最小二乘估计,为上个周期θ的最小二乘估计,φ(k)为当前周期k可供测量的信号,φt(k)为φ(k)的转置,φt(k)上个周期预测的q值,y(k)为当前周期k实际的q值,l(k)为当前周期k时的递归系数;
38、所述l(k)的计算公式为:
39、l(k)=p(k)φ(k)=p(k-1)φ(k)(λ+φt(k)p(k-1)φ(k))-1 (9)
40、p(k)=(i-l(k)φt(k))λ-1p(k-1) (10)
41、其中,p(k)为误差协方差矩阵,λ为遗忘因子,λ∈(0,1]。
42、优选的,对公式(8)进行非线性变形,得到公式(11):
43、y(k)=f(k,θ)+v (11)
44、其中,y(k)为当前周期k实际的q值,f(k,θ)为非线性系统q值的计算公式,v为建模时的噪声;
45、设定v=0,对公式(11)的y(k)进行以下近似:
46、
47、其中,表示当前周期为k,获取k-1时刻计算的q值,f(k)表示为斜率,
48、
49、将所述公式(12)变形为公式(7a)的形式,将q值的计算公式与换道时间进行关联:
50、
51、其中,为使用预测模型计算的q值;
52、将公式(13)展开得到:
53、
54、其中,为斜率f(k),
55、设定当前周期k测量的信号为路径的斜率,即φt(k)=f(k),将公式(10)变形为:
56、
57、其中,pk为当前周期k的误差协方差矩阵,pk-1为上个周期的误差协方差矩阵,λ的取值范围为(0,1];
58、根据公式(14)、(15)、(16),得到参数θ的最小二乘估计:
59、
60、其中,qk,m为当前周期k实际的q值,为当前周期k计算的q值,设定预测开始时
61、根据公式(17),计算得到当前周期k的自适应换道时间为:
62、
63、优选的,预设换道时间阈值tth,
64、判断所述自适应换道时间tprev,k是否小于tth,
65、若是,则根据公式(3)和tprev,k,获得路径的实际终点sf,根据路径的实际终点sf得到三条路径,计算每条路径的概率,根据概率最高的路径,推断目标车辆的驾驶行为意图;
66、否则,推断目标车辆的驾驶行为意图为保持当前车道直行。
67、优选的,根据路径的实际终点sf得到三条路径,计算每条路径的概率,包括以下步骤:
68、获取系统建模公式:
69、
70、
71、其中,z(tk)为x(tk)的测量值,m(tk)表示为当前周期k目标车辆所处的路径模式,w[tk,m(tk)]表示为当前周期k路径模式m(tk)的测量噪声,v[tk-1,m(tk)]表示为零均值高斯白噪声,f[m(tk)]表示为系统建模的线性化方程x(tk)的斜率,h[m(tk)]表示为z(tk)的斜率;
72、获取ti至tk时刻的测量数据,
73、根据公式(19)和(20),得到路径模式mj的后验概率:
74、
75、其中,表示ti至tk时间内的测量值序列;z(tk)表示tk时刻的测量值;j=1,2,3;当j取不同的值时,表示不同的路径模式mj;
76、根据公式(21),得到每条路径的模式概率ak[j]:
77、
78、其中,ak[j]表示为当前周期k第j条路径的模式概率,ak-1[j]表示为上个周期第j条路径的模式概率;
79、根据其中模式概率最高的一条路径,推断目标车辆的驾驶行为意图为左换道或直行或右换道。
80、优选的,获取路径模式mj在tk时刻的似然函数:
81、
82、其中,vj表示为在路径模式mj下的测量值的线性组合,pj为其协方差,为vj(tk)的概率密度函数,vj(tk)为高斯随机变量,均值设为0,pj(tk)为vj(tk)的协方差;
83、获取每个路径模式的估计误差协方差pk[j]以及测量值与实际值之间差值的均值rk[j],根据pk[j]和rk[j],计算得到每条路径的似然性p(rk[j]|mj),
84、设定似然性p(rk[j]|mj)具有高斯分布,根据公式(22),得到似然性p(rk[j]|mj)的计算公式:
85、
86、其中,rk[j]表示为当前周期k、第j条路径模式下测量值与实际值之间差值的均值,pk[j]表示为当前周期k、第j条路径模式的估计误差协方差,n为测量值序列的范数;
87、将公式(23)代入公式(21),得到每条路径的模式概率ak[j]。
88、本发明还设计了一种周围车辆驾驶行为意图的推断系统,包括:
89、控制模块,配置用于
90、建立以s轴、q轴为坐标轴的frenet坐标系,将目标车辆的驾驶路径建模为三次样条曲线,
91、预设初始换道时间tprev,
92、信息采集模块,配置用于
93、获取目标车辆在坐标系中的位置(st,qt)和初始航向角θt,确定初始路径公式(1),
94、获取所述终点sf的计算公式(3);
95、根据初始换道时间tprev和终点sf的计算公式(3),获取路径的预设终点sf,
96、获取系数a、b、c、d的计算公式(4);
97、计算模块,配置用于
98、利用线性递归最小二乘估计算法,根据公式(1)、公式(3)和公式(4),估计当前周期k自适应换道时间tprev,k,
99、根据公式(3)和tprev,k,获得路径的实际终点sf,
100、根据路径的实际终点sf得到三条路径,计算每条路径的概率,
101、根据概率最高的路径,推断目标车辆的驾驶行为意图。
102、本发明还设计了一种计算机设备,包括存储器和处理器;
103、所述存储器,用于存储计算机程序;
104、所述处理器,用于当执行所述计算机程序时,实现上述的推断方法。
- 还没有人留言评论。精彩留言会获得点赞!