一种自动驾驶卡车的挂车姿态检测方法与流程
本发明属于自动驾驶,具体涉及一种自动驾驶卡车的挂车姿态检测方法。
背景技术:
1、卡车通常由牵引车和挂车组成,自动驾驶卡车为了保证自动驾驶过程中的安全性和舒适性,通常装备有激光雷达,毫米波雷达和摄像头等传感器。在自动驾驶卡车变道和转弯过程中由于卡车和牵引车会有较大夹角,传感器在这种情况下会有较大盲区,此时对于挂车的姿态预估尤为重要,对于装在牵引车上的传感器可以预估盲区,对于装在挂车上的传感器,由于使用较为准确的挂车姿态作为输入,可以提升对目标的检测性能,保证自动驾驶安全性。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术的不足,提供一种自动驾驶卡车的挂车姿态检测方法,利用激光雷达测量出牵引车与挂车夹角,并计算出挂车姿态-挂车横摆角速度,增加了对挂车姿态的预估能力,提升挂车上传感器的检测性能。
2、本发明提供一种自动驾驶卡车的挂车姿态检测方法,包括如下步骤,
3、步骤s1.通过激光雷达测量出挂车相对与牵引车的夹角为yaw1,通过域控制器中的定位模块的输出获取到牵引车自身横摆角yaw2;
4、步骤s2.通过挂车相对与牵引车的夹yaw1与牵引车自身横摆角yaw2的差值与时间的微分计算出挂车姿态-挂车横摆角速度yaw rate。
5、作为本发明的进一步技术方案,步骤s2中挂车姿态-挂车横摆角速度yaw rate的计算公式为
6、yaw rate=(yaw1-yaw2)/dt;
7、其中,dt为挂车相对与牵引车的夹yaw1与牵引车自身横摆角yaw2的差值随着时间的变化。
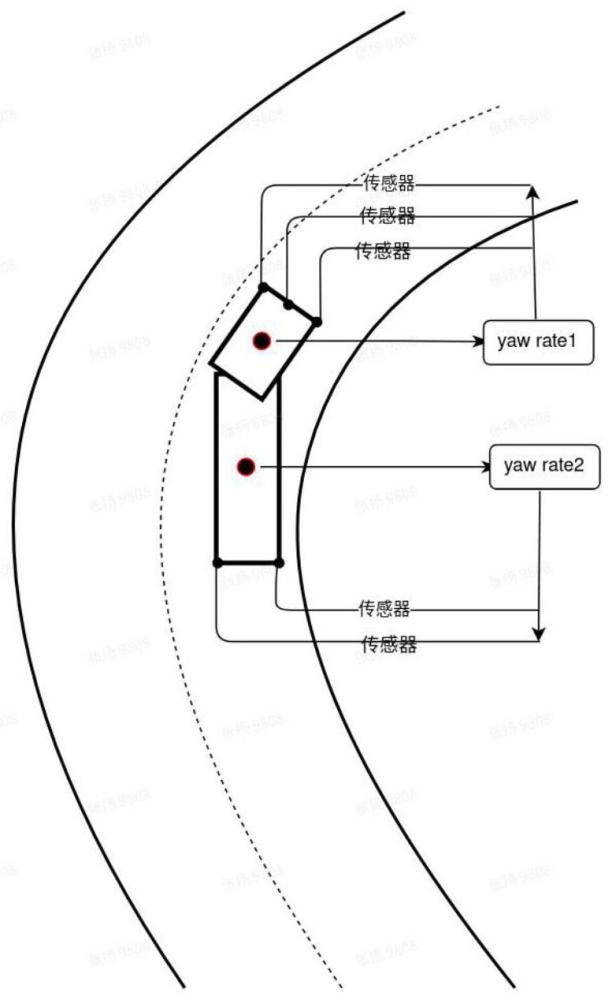
8、进一步的,牵引车的车头处和挂车的车尾处均安装传感器。
9、更进一步,传感器安装于牵引车的车头处的两侧及中心,挂车的车尾处两侧安装传感器。
10、进一步的,传感器包括但不限于激光雷达,毫米波雷达和摄像头。
11、进一步的,牵引车上的传感器使用挂车相对与牵引车的夹角yaw rate1作为输入,yaw rate1可以从整车can上获取,挂车上的传感器则使用牵引车自身横摆角yaw rate2作为输入。
12、本发明的优点在于,
13、1.通过激光雷达测量获取牵引车与挂车的夹角;
14、2.通过域控制器中的定位模块输出自车位姿中的yaw角;
15、3.通过牵引车与挂车转角及自车yaw角获取挂车姿态-挂车横摆角速度yaw rate;
16、4.挂车上的传感器使用换算的挂车姿态-挂车横摆角速度yaw rate作为输入,提升对目标的检测能力。
技术特征:
1.一种自动驾驶卡车的挂车姿态检测方法,其特征在于,包括如下步骤,
2.根据权利要求1所述的一种自动驾驶卡车的挂车姿态检测方法,其特征在于,所述步骤s2中挂车姿态-挂车横摆角速度yaw rate的计算公式为yaw rate=(yaw1-yaw2)/dt;
3.根据权利要求1所述的一种自动驾驶卡车的挂车姿态检测方法,其特征在于,所述牵引车的车头处和所述挂车的车尾处均安装传感器。
4.根据权利要求3所述的一种自动驾驶卡车的挂车姿态检测方法,其特征在于,所述传感器安装于所述所述牵引车的车头处的两侧及中心,所述挂车的车尾处两侧安装所述传感器。
5.根据权利要求3所述的一种自动驾驶卡车的挂车姿态检测方法,其特征在于,所述传感器包括但不限于激光雷达,毫米波雷达和摄像头。
6.根据权利要求1所述的一种自动驾驶卡车的挂车姿态检测方法,其特征在于,所述牵引车上的传感器使用挂车相对与牵引车的夹角yaw rate1作为输入,yaw rate1可以从整车can上获取,所述挂车上的传感器则使用牵引车自身横摆角yaw rate2作为输入。
技术总结
一种自动驾驶卡车的挂车姿态检测方法,包括如下步骤,步骤S1.通过激光雷达测量出挂车相对与牵引车的夹角为yaw1,通过域控制器中的定位模块的输出获取到牵引车自身横摆角yaw2;步骤S2.通过挂车相对与牵引车的夹yaw1与牵引车自身横摆角yaw2的差值与时间的微分计算出挂车姿态‑挂车横摆角速度yaw rate。该方法利用激光雷达测量出牵引车与挂车夹角,并计算出挂车姿态‑挂车横摆角速度,增加了对挂车姿态的预估能力,提升挂车上传感器的检测性能。
技术研发人员:张扬,张显宏,衡量
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!