一种电动车紧急制动的控制方法及系统与流程
本发明涉及汽车,具体是涉及一种电动车紧急制动的控制方法及系统。
背景技术:
1、紧急制动是指汽车在行驶过程中遇到紧急情况时,驾驶者迅速,正确的使用制动器,在最短距离内将车停住。安装制动防抱死装置系统的车辆操作方法:迅速抬起加速踏板,并立即用力猛踩制动踏板,同时踩下离合踏板,使汽车迅速停下。
2、但实际进行紧急制动时,路面环境复杂,不同路面摩擦系数不同,制动距离难以判断,由驾驶人直接判断,容易出现偏差,会因为车距不足或车速过快,导致追尾或碰撞的情况。
技术实现思路
1、为解决上述技术问题,提供一种电动车紧急制动的控制方法及系统,本技术方案解决了上述背景技术中提出的实际进行紧急制动时,路面环境复杂,不同路面摩擦系数不同,制动距离难以判断,由驾驶人直接判断,容易出现偏差,会因为车距不足或车速过快,导致追尾或碰撞的情况的问题。
2、为达到以上目的,本发明采用的技术方案为:
3、一种电动车紧急制动的控制方法,包括:
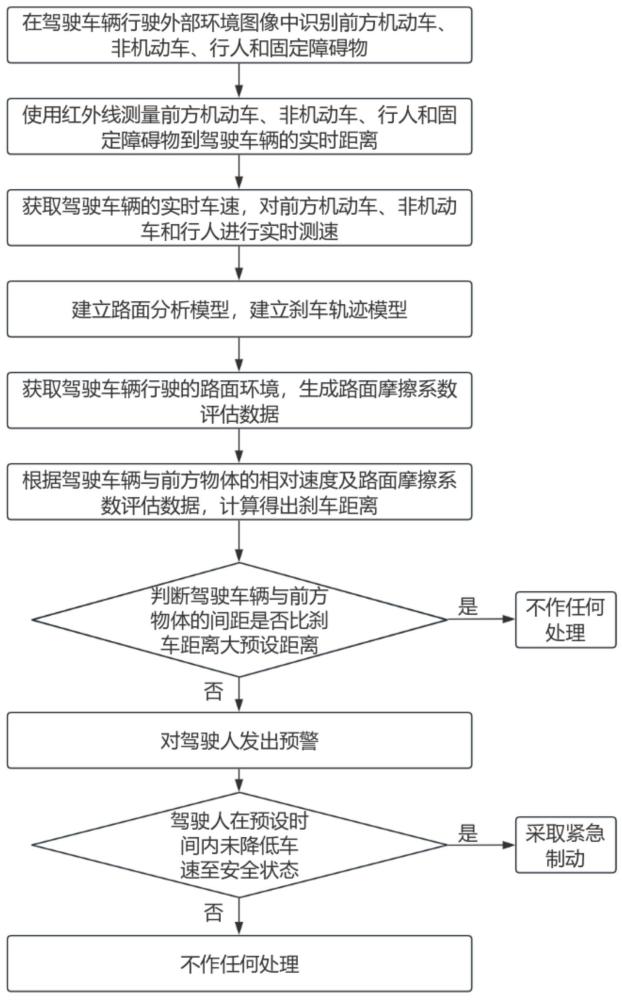
4、以预设时间为间隔,使用摄像头获取至少一个驾驶车辆行驶外部环境图像,在驾驶车辆行驶外部环境图像中识别前方机动车、非机动车、行人和固定障碍物;
5、使用红外线测量前方机动车、非机动车、行人和固定障碍物到驾驶车辆的实时距离,排除实时距离大于给定值的前方机动车、非机动车、行人和固定障碍物;
6、获取驾驶车辆的实时车速;
7、对前方机动车、非机动车和行人进行实时测速;
8、建立路面分析模型,建立刹车轨迹模型;
9、获取驾驶车辆行驶的路面环境,生成路面摩擦系数评估数据;
10、获取驾驶车辆的行进路线的前方物体,所述前方物体为前方机动车、非机动车、行人或固定障碍物的其中一种,获取前方物体的速度,计算得出驾驶车辆与前方物体的相对速度,根据驾驶车辆与前方物体的相对速度及路面摩擦系数评估数据,计算得出刹车距离;
11、判断驾驶车辆与前方物体的间距是否比刹车距离大预设距离,若是,则不作任何处理,若否,则对驾驶人发出预警,若驾驶人在预设时间内未降低车速至安全状态,则采取紧急制动,若驾驶人在预设时间内降低车速至安全状态,则不作任何处理。
12、优选的,所述在驾驶车辆行驶外部环境图像中识别前方机动车、非机动车、行人和固定障碍物包括以下步骤:
13、在至少一个驾驶车辆行驶外部环境图像中,提取固定物体作为参考点,所述固定物体为路灯杆、树木或指示牌;
14、在连续的驾驶车辆行驶外部环境图像中,提取至少一个外部物体轮廓;
15、判断在连续的驾驶车辆行驶外部环境图像中,外部物体轮廓与参考点的相对位置是否发生变化,若否,则判断外部物体轮廓为固定障碍物;
16、若是,则计算外部物体轮廓与参考点的间距的变化速率,若变化速率小于预设速率,则判断外部物体轮廓为行人;
17、若否,则判断外部物体轮廓面积是否大于预设面积,若是,则判断为前方机动车,若否,则判断为非机动车;
18、其中,计算外部物体轮廓与参考点的间距的变化速率如下:
19、获得两个所述驾驶车辆行驶外部环境图像的拍摄时间间隔,在两个所述驾驶车辆行驶外部环境图像中,分别得到外部物体轮廓与参考点的第一间距和第二间距,计算得出第一间距和第二间距的差值,使用差值除以拍摄时间间隔,得到变化速率。
20、优选的,所述使用红外线测量前方机动车、非机动车、行人和固定障碍物到驾驶车辆的实时距离包括以下步骤:
21、根据前方机动车、非机动车、行人和固定障碍物的识别结果,分别得到前方机动车、非机动车、行人和固定障碍物与驾驶车辆的至少一个方向关系;
22、红外线沿方向关系所呈现的方向发射,获取红外线往返时间;
23、计算得出前方机动车、非机动车、行人和固定障碍物到驾驶车辆的实时距离。
24、优选的,所述对前方机动车、非机动车和行人进行实时测速包括以下步骤:
25、获取驾驶车辆的实时车速;
26、获取前方机动车、非机动车和行人到驾驶车辆的实时距离;
27、获取前0.1秒的前方机动车、非机动车和行人到驾驶车辆的既往距离;
28、使用实时距离减去既往距离的值除以0.1,作为前方机动车、非机动车和行人到驾驶车辆的相对车速;
29、将实时车速与相对车速叠加,得到前方机动车、非机动车和行人的实时速度。
30、优选的,所述建立路面分析模型包括以下步骤:
31、获取至少一个路面材质,获取路面材质反射超声波的强度情况;
32、获得同一路面材质不同程度的磨损图像,获取同一路面材质不同程度的磨损对应的路面摩擦系数。
33、优选的,所述建立刹车轨迹模型包括以下步骤:
34、获取驾驶车辆使用的轮胎材质,获取驾驶车辆的重量;
35、将轮胎材质和重量作为模型不变量;
36、设置模型变量为驾驶车辆的车速和路面摩擦系数;
37、在不同驾驶车辆的车速和路面摩擦力的条件下,测试驾驶车辆的刹车距离;
38、将刹车距离与对应的驾驶车辆的车速和路面摩擦力配对。
39、优选的,所述获取驾驶车辆行驶的路面环境,生成路面摩擦系数评估数据包括以下步骤:
40、对驾驶车辆行驶的路面环境发射超声波,根据路面对超声波反射的强度及路面分析模型,分析得到路面环境的路面材质;
41、使用图像识别技术,分析得到路面材质所对应的磨损程度;
42、根据路面分析模型,获取驾驶车辆行驶的路面环境对应的路面摩擦系数。
43、优选的,所述计算得出刹车距离包括以下步骤:
44、驾驶车辆与前方物体的相对速度v,获取驾驶车辆的重量g,获取路面摩擦系数;
45、计算得出路面摩擦力等于;
46、在刹车轨迹模型中,调用与相对速度v和路面摩擦力配对的刹车距离。
47、优选的,所述降低车速至安全状态具体如下:
48、获取降低车速后的实际车速,计算得出驾驶车辆与前方物体的更新相对速度,根据驾驶车辆与前方物体的更新相对速度及路面摩擦系数评估数据,计算得出更新刹车距离;
49、重新获取驾驶车辆与前方物体的更新间距;
50、判断驾驶车辆与前方物体的更新间距是否比更新刹车距离大预设距离,若是,则判断降低车速至安全状态,若否,则判断未降低车速至安全状态。
51、一种电动车紧急制动的控制系统,用于实现上述的电动车紧急制动的控制方法,包括:
52、目标提取模块,所述目标提取模块在驾驶车辆行驶外部环境图像中识别前方机动车、非机动车、行人和固定障碍物;
53、红外测距模块,所述红外测距模块使用红外线测量前方机动车、非机动车、行人和固定障碍物到驾驶车辆的实时距离;
54、测速模块,所述测速模块获取驾驶车辆的实时车速,对前方机动车、非机动车和行人进行实时测速;
55、模型建立模块,所述模型建立模块建立路面分析模型,建立刹车轨迹模型;
56、路面分析模块,所述路面分析模块获取驾驶车辆行驶的路面环境,生成路面摩擦系数评估数据;
57、刹车预测模块,所述刹车预测模块根据驾驶车辆与前方物体的相对速度及路面摩擦系数评估数据,计算得出刹车距离;
58、距离判断模块,所述距离判断模块判断驾驶车辆与前方物体的间距是否比刹车距离大预设距离;
59、紧急制动模块,所述紧急制动模块采取紧急制动。
60、与现有技术相比,本发明的有益效果在于:
61、通过设置模型建立模块、路面分析模块、刹车预测模块和距离判断模块,建立模块建立路面分析模型,建立刹车轨迹模型,并根据建立的模型,对于驾驶车辆行驶的路面进行分析,得出当前车辆行驶的路面摩擦系数,进而可以根据实时车速,计算刹车距离,进而判断驾驶车辆与前方物体的间距是否比刹车距离大预设距离,并根据判断结果,发出预警,若预警无效,则采取紧急制动,进而保证在任何路面环境下,都能准确预留足够的空间用于紧急制动,避免发生碰撞或追尾。
- 还没有人留言评论。精彩留言会获得点赞!