车辆及车辆的攀爬控制方法与流程
本发明涉及车辆,具体涉及车辆及车辆的攀爬控制方法。
背景技术:
1、目前,扫路机等作业机械的作业工况中包含攀爬路牙石至人行道作业的工况,扫路机等作业机械攀爬路牙石技术采用液压四轮驱动,在扫路机上配置用来驱动车辆行驶的液压油泵,整车的动力来源于发动机,通过发动机带动液压油泵,液压油泵为配置在每个轮胎上的摆线马达供油,驱动车辆行驶,再配置宽的低胎压草地胎,使得整车在四轮驱动下平稳爬越路牙石。
2、采用液压四轮驱动方式攀爬路牙石时,轮胎与路牙石硬碰接触,在攀爬时,轮胎受到路牙石的作用力很大,会降低轮胎的使用寿命。
技术实现思路
1、有鉴于此,本发明提供了一种车辆及车辆的攀爬控制方法,以解决采用液压四轮驱动方式攀爬路牙石时降低轮胎的使用寿命的问题。
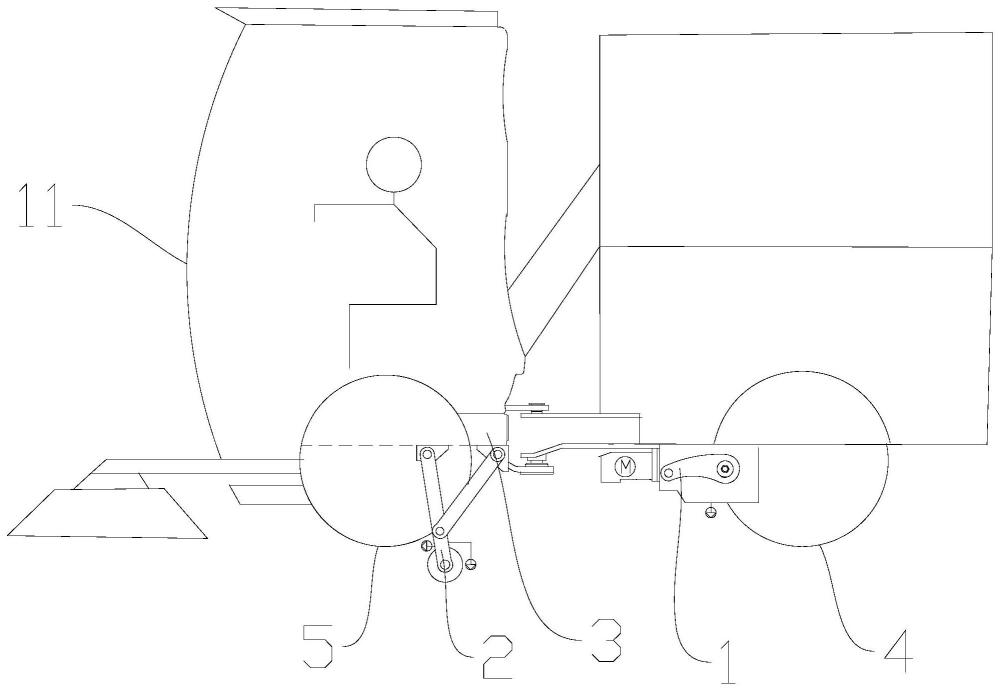
2、第一方面,本发明提供了一种车辆,包括:车架;驱动轮,可转动的设置在车架上;从动轮,可转动的设置在车架上;第一辅助攀爬机构,设置在车架上且位于驱动轮的中心的前侧;第二辅助攀爬机构,设置在车架上且位于从动轮的中心的后侧;控制器,与第一辅助攀爬机构、第二辅助攀爬机构电连接,控制器用于根据驱动轮的第一攀爬信息控制第一辅助攀爬机构处于攀爬状态或第一避让状态及用于根据从动轮的第二攀爬信息控制第二辅助攀爬机构处于支撑状态或第二避让状态。
3、有益效果:通过第一辅助攀爬机构实现驱动轮的攀爬,通过第二辅助攀爬机构实现从动轮的攀爬,在攀爬时不借助驱动轮和从动轮攀爬,使得轮胎与待攀爬物体接触时受到的作用力很小,保护了轮胎,延长了轮胎的使用寿命。
4、在一种可选的实施方式中,第一辅助攀爬机构包括可旋转的回转臂和第一驱动机构,第一驱动机构的驱动轴与回转臂连接,回转臂具有攀爬端,攀爬端适于在攀爬时与待攀爬物体的表面接触。
5、有益效果:第一辅助攀爬机构的结构简单,便于实现。
6、在一种可选的实施方式中,第二辅助攀爬机构包括可活动的支撑臂和第二驱动机构,支撑臂的第一端上设有支撑滚轮,第二驱动机构与支撑臂连接,第二驱动机构驱动支撑臂运动,以使支撑滚轮与靠近且低于待攀爬物体的上表面的行走面接触或分离。
7、有益效果:第二辅助攀爬机构的结构简单,易于实现。
8、在一种可选的实施方式中,车辆还包括高度检测件,高度检测件适于检测待攀爬物体的高度,控制器与高度检测件电连接,控制器用于根据高度检测件的高度信息控制支撑臂的位置和回转臂的位置。
9、有益效果:根据待攀爬物体的高度控制支撑臂的位置和回转臂的位置,使得车辆可以攀爬不同高度的待攀爬物体,实现精准控制。
10、在一种可选的实施方式中,车辆还包括驱动轮到位检测件,驱动轮到位检测件用于检测驱动轮是否到达待攀爬位置,控制器与驱动轮到位检测件电连接,控制器用于根据驱动轮到位检测件检测到驱动轮到达待攀爬位置时控制第一辅助攀爬机构动作;或者,车辆还包括驾驶室和攀爬操作件,攀爬操作件设置在驾驶室内,攀爬操作件与控制器电连接,控制器用于根据攀爬操作件的打开信息控制第一辅助攀爬机构动作。
11、有益效果:通过驱动轮到位检测件来检测驱动轮是否到位,控制更准确。
12、在一种可选的实施方式中,车辆还包括支撑到位检测件,支撑到位检测件用于检测第二辅助攀爬机构是否支撑到位,控制器与支撑到位检测件电连接,控制器用于根据支撑到位检测件检测到第二辅助攀爬机构支撑到位时控制车辆前进,以使从动轮爬上待攀爬物体。
13、有益效果:通过支撑到位检测件来检测的支撑臂是否到位,便于进行后续动作。
14、在一种可选的实施方式中,车辆还包括第一到位检测件,第一到位检测件用于检测从动轮是否爬上待攀爬物体,控制器与第一到位检测件电连接,控制器用于根据第一到位检测件检测到从动轮爬上待攀爬物体时控制第二辅助攀爬机构切换至第二避让状态。
15、有益效果:当第一到位检测件检测到从动轮已经爬上待攀爬物体时,控制器控制支撑臂和支撑滚轮收回,防止车辆继续前进时支撑臂和支撑滚轮与路牙石发生干涉的情况。
16、在一种可选的实施方式中,车辆还包括驾驶室和攀爬操作件,攀爬操作件设置在驾驶室内,攀爬操作件与控制器电连接,控制器用于根据攀爬操作件的打开信息控制第二辅助攀爬机构动作;或者,车辆还包括第二到位检测件,第二到位检测件用于检测从动轮是否到达待攀爬位置,控制器与第二到位检测件电连接,控制器用于根据第二到位检测件检测到从动轮到达待攀爬位置时控制第二辅助攀爬机构切换至支撑状态。
17、有益效果:通过第二到位检测件来检测从动轮是否到位,控制更准确。
18、第二方面,本发明还提供了一种车辆的攀爬控制方法,应用于上述的车辆,攀爬控制方法包括以下步骤:获取车辆行进时的驱动轮的第一攀爬信息或从动轮的第二攀爬信息;根据驱动轮的第一攀爬信息控制第一辅助攀爬机构处于攀爬状态,在驱动轮爬上待攀爬物体后,控制第一辅助攀爬机构处于第一避让状态;根据从动轮的第二攀爬信息控制第二辅助攀爬机构处于支撑状态,在从动轮爬上待攀爬物体后,控制第二辅助攀爬机构处于第二避让状态。
19、在一种可选的实施方式中,当从动轮位于驱动轮的前方时,先根据从动轮的第二攀爬信息控制第二辅助攀爬机构处于支撑状态,再根据驱动轮的第一攀爬信息控制第一辅助攀爬机构处于攀爬状态;当从动轮位于驱动轮的后方时,先根据驱动轮的第一攀爬信息控制第一辅助攀爬机构处于攀爬状态,再根据从动轮的第二攀爬信息控制第二辅助攀爬机构处于支撑状态。
20、在一种可选的实施方式中,第一辅助攀爬机构包括可旋转的回转臂和第一驱动机构,第一驱动机构的驱动轴与回转臂连接,回转臂具有攀爬端,攀爬端适于在攀爬时与待攀爬物体的表面接触,第二辅助攀爬机构包括可活动的支撑臂和第二驱动机构,支撑臂的第一端上设有支撑滚轮,第二驱动机构与支撑臂连接,第二驱动机构驱动支撑臂运动,以使支撑滚轮与靠近且低于待攀爬物体的上表面的行走面接触或分离;攀爬控制方法还包括:获取待攀爬物体的高度信息;根据高度信息控制回转臂和支撑臂的位置。
21、在一种可选的实施方式中,车辆还包括驱动轮到位检测件,驱动轮到位检测件用于检测驱动轮是否到达待攀爬位置,驱动轮的第一攀爬信息为驱动轮到位检测件所检测到的驱动轮到达待攀爬位置;或者,车辆还包括驾驶室和攀爬操作件,攀爬操作件设置在驾驶室内,驱动轮的第一攀爬信息为攀爬操作件的打开信息。
22、在一种可选的实施方式中,车辆还包括支撑到位检测件,支撑到位检测件用于检测第二辅助攀爬机构是否支撑到位,控制第二辅助攀爬机构处于支撑状态的步骤之后,攀爬控制方法还包括:获取支撑到位检测件的到位检测信息;根据支撑到位检测件的到位检测信息控制车辆前进,以使从动轮爬上待攀爬物体。
23、在一种可选的实施方式中,车辆还包括第一到位检测件,第一到位检测件用于检测从动轮是否爬上待攀爬物体,控制第二辅助攀爬机构处于支撑状态的步骤之后,攀爬控制方法还包括:获取第一到位检测件的到位检测信息;根据第一到位检测件的到位检测信息控制第二辅助攀爬机构切换至第二避让状态。
24、在一种可选的实施方式中,车辆还包括驾驶室和攀爬操作件,攀爬操作件设置在驾驶室内,从动轮的第二攀爬信息为攀爬操作件的打开信息;或者,车辆还包括第二到位检测件,第二到位检测件用于检测从动轮是否到达待攀爬位置,从动轮的第一攀爬信息为第二到位检测件所检测到的从动轮到达待攀爬位置。
- 还没有人留言评论。精彩留言会获得点赞!