自动驾驶模式切换方法、装置和车辆与流程
本申请涉及自动驾驶,尤其涉及自动驾驶模式切换方法、装置和车辆。
背景技术:
1、当前汽车自动驾驶领域,基于使用场景通常把自动驾驶功能划分为行车功能和泊车功能,两种功能使用的算法和传感器都有较大差异,同时由于成本和计算资源的限制,车辆运行过程中往往不能同时运行行车和泊车的软件,因此在车辆自动驾驶过程中,需要对行车模式和泊车模式进行切换。
2、相关技术中基于固定的规则实现自动驾驶模式的切换,然而规则往往基于开发人员的经验和部分用户的调研统计得出,这种固定的规则并不一定适用于每个用户,同时用户的部分需求也是难以量化,导致开发人员设定的规则容易出现漏洞或者不适用,因此无法满足用户在规则之外的切换需求,需要用户主动选择切换,从而降低用户的自动驾驶体验。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种自动驾驶模式切换方法、装置和车辆,能够满足用户在规则之外的切换需求,且能够减少用户的手动切换操作,提升用户的自动驾驶体验。
2、本申请第一方面提供一种自动驾驶模式切换方法,所述方法包括:
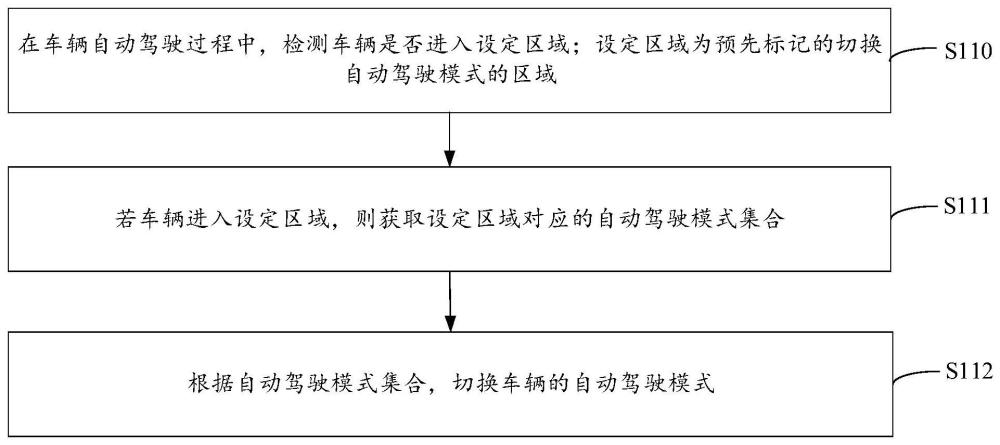
3、在车辆自动驾驶过程中,检测所述车辆是否进入设定区域;所述设定区域为预先标记的切换自动驾驶模式的区域;
4、若所述车辆进入所述设定区域,则获取所述设定区域对应的自动驾驶模式集合;
5、根据所述自动驾驶模式集合,切换所述车辆的自动驾驶模式。
6、在一实施方式中,所述自动驾驶模式集合包括至少一个期望模式;所述根据所述自动驾驶模式集合,切换所述车辆的自动驾驶模式,包括:
7、获取所述车辆的第一速度数据;
8、从所述至少一个期望模式中,判断是否存在与所述第一速度数据匹配的目标期望模式;
9、若存在所述目标期望模式,则将所述车辆的自动驾驶模式切换为所述目标期望模式;所述目标期望模式包括行车模式和泊车模式中的任一种。
10、在一实施方式中,所述设定区域通过如下方式标记得到:
11、获取已触发的模式切换历史数据;其中,所述模式切换历史数据包括多个切换坐标点;
12、基于所述多个切换坐标点的分布密度进行区域划分,得到初始区域;
13、若所述初始区域的切换坐标点数量大于或等于第一预设数量,则将所述初始区域标记为所述设定区域。
14、在一实施方式中,所述基于所述多个切换坐标点的分布密度进行区域划分,得到初始区域,包括:
15、每获取到目标坐标点时,以所述目标坐标点作为几何中心,生成预设大小的目标几何区域;所述目标坐标点包括所述切换坐标点和计算得到的第二质心坐标点中的任一种;
16、若所述目标几何区域的切换坐标点数量大于第二预设数量,则计算所述目标几何区域内的多个切换坐标点的第一质心坐标点;
17、以所述第一质心坐标点为几何中心,生成预设大小的移动几何区域;
18、若所述移动几何区域与所述目标几何区域的切换坐标点数量差大于或等于第三预设数量,则计算所述移动几何区域内的多个切换坐标点的第二质心坐标点;
19、将所述第二质心坐标点作为所述目标坐标点以进行迭代循环,直至所述移动几何区域与所述目标几何区域的切换坐标点数量差小于所述第三预设数量时,将末尾生成的所述目标几何区域作为初始区域。
20、在一实施方式中,所述切换坐标点通过如下方式记录得到:
21、当接收到针对系统切换提示信息触发的自动驾驶模式纠正信息时,记录所述车辆当前位置的切换坐标点,其中,所述系统切换提示信息为所述车辆满足预设切换条件时系统展示的切换后的自动驾驶模式的提示信息,所述自动驾驶模式纠正信息用于指示系统恢复切换前的自动驾驶模式;
22、和/或,
23、当接收到自动驾驶模式切换信息时,记录所述车辆当前位置的切换坐标点。
24、在一实施方式中,所述模式切换历史数据还包括所述多个切换坐标点分别对应的车辆状态信息,所述车辆状态信息包括所述车辆的第二速度数据、所述自动驾驶模式纠正信息和所述自动驾驶模式切换信息;所述期望模式通过如下方式学习得到:
25、根据所述第二速度数据,分别对各个设定区域进行车速区间划分,得到第一车速区间和第二车速区间;其中,所述各个设定区域均分别包含所述第一车速区间和所述第二车速区间;
26、根据所述自动驾驶模式纠正信息和所述自动驾驶模式切换信息,分别统计各个第一车速区间和各个第二车速区间内各种自动驾驶模式对应的触发次数;
27、分别将各个第一车速区间和各个第二车速区间内触发次数最多的自动驾驶模式确定为所述期望模式;其中,所述各个设定区域分别包括至少一个期望模式。
28、在一实施方式中,所述方法还包括:
29、若所述车辆未进入所述设定区域,则根据预设切换条件,切换所述车辆的自动驾驶模式。
30、在一实施方式中,所述方法还包括:
31、在切换所述车辆的自动驾驶模式后,展示切换完成提示信息。
32、本申请第二方面提供一种自动驾驶模式切换装置,所述装置包括:
33、设定区域检测模块,用于在车辆自动驾驶过程中,检测所述车辆是否进入设定区域;所述设定区域为预先标记的切换自动驾驶模式的区域;
34、自动驾驶模式集合获取模块,用于若所述车辆进入所述设定区域,则获取所述设定区域对应的自动驾驶模式集合;
35、第一切换模块,用于根据所述自动驾驶模式集合,切换所述车辆的自动驾驶模式。
36、本申请第三方面提供一种车辆,包括:
37、处理器;以及
38、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
39、本申请提供的技术方案可以包括以下有益效果:
40、本申请提供的方案,在车辆自动驾驶过程中,检测车辆是否进入设定区域;设定区域为预先标记的切换自动驾驶模式的区域;若车辆进入设定区域,则获取设定区域对应的自动驾驶模式集合;根据自动驾驶模式集合,切换车辆的自动驾驶模式。本申请通过基于用户切换模式的习惯预先标记设定区域,以便在车辆进入设定区域时基于用户习惯进行切换,从而能够满足用户在规则之外的切换需求,且能够减少用户的手动切换操作,提升用户的自动驾驶体验。
41、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种自动驾驶模式切换方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自动驾驶模式集合包括至少一个期望模式;所述根据所述自动驾驶模式集合,切换所述车辆的自动驾驶模式,包括:
3.根据权利要求2所述的方法,其特征在于,所述设定区域通过如下方式标记得到:
4.根据权利要求3所述的方法,其特征在于,所述基于所述多个切换坐标点的分布密度进行区域划分,得到初始区域,包括:
5.根据权利要求3所述的方法,其特征在于,所述切换坐标点通过如下方式记录得到:
6.根据权利要求5所述的方法,其特征在于,所述模式切换历史数据还包括所述多个切换坐标点分别对应的车辆状态信息,所述车辆状态信息包括所述车辆的第二速度数据、所述自动驾驶模式纠正信息和所述自动驾驶模式切换信息;所述期望模式通过如下方式学习得到:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种自动驾驶模式切换装置,其特征在于,所述装置包括:
10.一种车辆,其特征在于,包括:
技术总结
本申请涉及一种自动驾驶模式切换方法、装置和车辆。该方法包括:在车辆自动驾驶过程中,检测车辆是否进入设定区域;设定区域为预先标记的切换自动驾驶模式的区域;若车辆进入设定区域,则获取设定区域对应的自动驾驶模式集合;根据自动驾驶模式集合,切换车辆的自动驾驶模式。本申请提供的方案,能够满足用户在规则之外的切换需求,且能够减少用户的手动切换操作,提升用户的自动驾驶体验。
技术研发人员:罗澄蔚,翟昆仑,许超,王学渊,张培锋
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!