一种基于轨压波动模型的高压共轨燃油系统喷油规律预测方法
本发明属于柴油机燃油系统,具体涉及一种适用于高压共轨燃油系统的喷油规律实时预测方法。
背景技术:
1、目前,柴油机高压共轨系统的喷油量控制都是基于标定map图的开环控制模式,且在实际运行过程中无法实时测量喷油信息,由于系统运行工况变化及结构参数退化等因素的影响,往往难以保证循环喷油性能的一致性和可靠性。如果能在柴油机实际运行过程中实时监测喷射信息,从而对喷油规律进行闭环调整与修正,可以大大提高喷油控制的精确性。
2、燃油喷射过程引起的压力瞬时下降直接反映了喷油过程信息,目前基于燃油压力信号进行喷油预测研究主要通过建立动态数学模型,对其进行数值求解计算得到喷油量,这些方法本质上是开环计算,由于建模误差、初始条件设置不当、噪声干扰等因素,计算得到的喷油量结果存在较大误差。针对这一局限性,发明人已经申请了中国专利“一种基于闭环观测器的高压共轨系统喷油量预测方法”,引入闭环反馈校正思想,实现了循环喷油量的实时观测与闭环修正(中国专利:zl202010577723.3,该专利已授权)。在此基础上,当轨压大范围变化时,模型参数随工况变化,系统存在较大非线性,发明人采用卡尔曼滤波算法对观测过程进行了优化,可对状态变量的估计值与反馈增益进行不断循环迭代与滚动优化(中国专利:cn2022112886412)。然而,以上方法仅考虑了喷油过程对压力波动的影响,即只针对喷油过程不供油的情况进行建模,该方法适用于喷油过程与供油过程不重叠的情况。当供油过程与喷油过程存在重叠时,喷油引起的轨压下降过程将受到供油过程的影响,上述建立的喷油观测模型不再适用。
技术实现思路
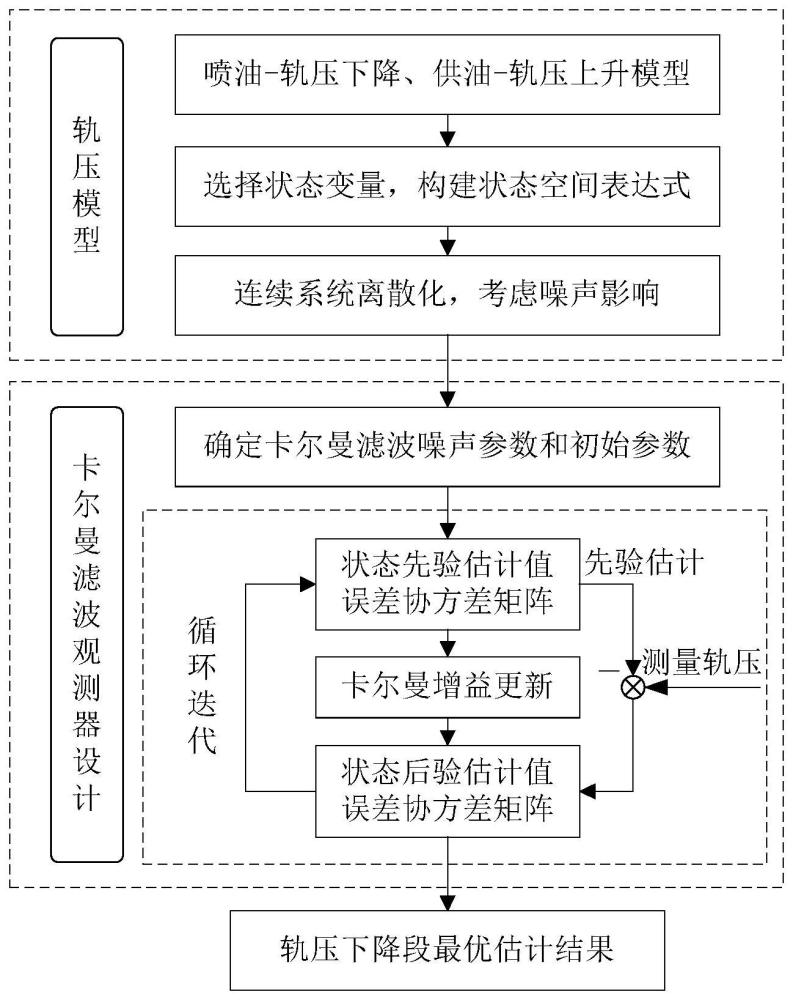
1、为解决上述问题,本发明的提出了一种基于优化轨压波动模型的高压共轨燃油系统喷油规律预测方法,同时考虑由喷油引起的轨压下降过程,以及由供油引起的轨压上升过程,建立了轨压波动模型,该模型同时考虑了喷油、供油过程对压力波动的影响,可以更全面、精确的反映压力波动规律,在此基础上设计基于卡尔曼滤波的轨压观测器,利用观测得到的轨压下降过程,实现高压共轨系统喷油率和喷油量的实时观测计算。注:本发明中(·)为一阶导数,(··)为二阶导数,(^)为估计值。
2、本发明所采用的技术方案如下:
3、一种基于优化轨压波动模型的高压共轨燃油系统喷油规律预测方法,该方法的包括如下步骤:
4、1)建立轨压波动模型;
5、2)根据步骤1)中的轨压波动模型建立离散化的状态空间模型;
6、3)基于卡尔曼滤波器的轨压波动最优估计;
7、4)利用轨压降最优估计结果计算喷油规律;
8、其中,步骤1)建立轨压波动模型为:
9、轨压变化p为减去稳态值pss后的瞬时轨压波动,由上升过程和下降过程的叠加构成,表达为:
10、p(t)=pdown(t)+pup(t) (1)
11、其中,轨压下降阶段模型:
12、
13、比例系数kdown(pss)=k(pss)·α(pss),其值等于喷油过程的轨压下降量与相应喷油脉宽之比;k为比例系数,其值取决于目标轨压;τdown为喷油率输出响应的时间常数;
14、
15、closs为燃油损失系数,其值为qinj与qloss之比,稳态值pss为当前工况目标轨压,v0为共轨管初始容积,δv(pss)为共轨管容积补偿量,喷油时序信号uinj(t)是脉宽调制信号
16、
17、周期t为喷油间隔,喷油开始时刻tstart由轨压开始下降时刻确定,结束时刻tend由喷油持续时间确定;
18、轨压上升阶段模型:
19、
20、pup(t)为轨压上升量,τup为轨压上升过程输出响应的惯性时间常数,比例系数kup(pss)为轨压上升量与相应供油量之比;
21、
22、upump(t)为供油量阶跃输入,该阶跃输入信号的幅值为当前工况参考供油量,阶跃输入作用时刻tstep可由轨压开始上升时刻确定;
23、步骤2)中离散化的状态空间模型为:
24、
25、式中,k表示采样点数,cd=c=[1 0 1];输出y为减去稳态值后的瞬时轨压波动p;输入信号u=[uinj upump]t;包含轨压下降量pdown、轨压下降率轨压上升量pup三个变量作为状态变量;
26、步骤3)基于卡尔曼滤波器的轨压波动最优估计的步骤为:
27、考虑模型不确定性wu(k)和测量噪声v(k),离散系统状态空间模型表示为:
28、
29、其中,输入过程噪声wu(k)为[winj(k)wpump(k)]t;wu(k)与v(k)假定为互不相关的零均值高斯白噪声,其协方差矩阵分别为q和r;
30、由于模型(19)中bd随轨压工况变化而改变,为适应工况变化,过程噪声协方差矩阵q可优化设计为时变矩阵:
31、q(k)=bd(k)e[wu(k)wu(k)t]bd(k)t (6)
32、在设定初值和p(0)+,并设定好q和r后,
33、①计算先验估计值
34、
35、②计算先验估计误差的协方差矩阵p(k)-:
36、p(k)-=αd(k-1)p(k-1)+αd(k-1)t+q(k-1) (8)
37、③根据p(k)-计算卡尔曼反馈增益k(k):
38、k(k)=p(k)-cd(k)t[cd(k)p(k)-cd(k)t+r(k)]-1 (9)
39、④在第k时刻,以测量值y(k)与先验估计输出之差作为反馈,对先验估计值进行修正,得到后验估计值
40、
41、⑤计算后验协方差矩阵p(k)+:
42、p(k)+=(i-k(k)cd(k))p(k)-(i-k(k)cd(k))t+k(k)r(k)k(k)t (11)
43、通过步骤①~步骤⑤的循环,不断更新系统状态、误差协方差矩阵和卡尔曼滤波增益,使后验估计值趋近于真实值,即后验误差趋于0,完成高压共轨系统状态变量的最优估计;
44、步骤4)利用轨压降最优估计结果计算喷油规律的步骤为:
45、利用步骤3)中高压共轨系统状态变量估计值中的根据式(4)计算喷油率:
46、
47、式中,closs为燃油损失系数;在一定轨压p1下,该系数与燃油泄漏量vleak、回油量vre和喷油量vinj有关:
48、
49、利用实验或者仿真手段,测量设定轨压p1下的vleak、vre和vinj的数据,根据式(14)得到closs(p1),并改变轨压,得到不同设定轨压下的closs,应用最小二乘拟合出轨压大范围时的closs(pss);
50、将在喷油阶段内进行求和,得到喷油量观测值
51、
52、本发明的优势在于:
53、1.根据喷油过程与供油过程对轨压变化的影响,建立了喷油与轨压下降段、供油与轨压上升段之间的传递函数,并选取轨压下降量pdown、轨压下降率轨压上升量pup三个变量,构建可观的状态空间模型,该模型可适用于供油与喷油存在重叠情况下的轨压波动观测。
54、2.将模型不确定性及测量噪声影响考虑在模型中,提出了基于卡尔曼滤波算法的喷油规律最优估计方法。利用卡尔曼滤波递推原理,实时更新反馈增益矩阵,并为适应大范围轨压工况变化,对过程噪声协方差矩阵q进行了优化设计。由此得到喷油引起轨压下降过程的最优估计结果,从而实现对喷油信息的在线实时准确观测。
- 还没有人留言评论。精彩留言会获得点赞!