一种滑行回收控制方法、整车控制器及电动汽车与流程
本申请涉及新能源汽车,尤其涉及一种滑行回收控制方法、整车控制器及电动汽车。
背景技术:
1、对于电动汽车而言,电制动回收由驱动电机实现,液压制动由底盘制动系统实现,两者的电液制动分配策略,通常由整车控制器(vehicle control unit,简称vcu)及制动控制器(brake control module,简称bcm)交互配合实现。
2、现有技术中,vcu在监测到需要进行滑行回收时,向bcm发送滑行回收请求。bcm基于滑行回收请求,驱动电机实际扭矩以及整车减速度,决定是否需要进行液压制动补偿,如无需液压制动补偿,将滑行回收扭矩目标反馈回给vcu,vcu再请求前后电机进行滑行回收;如需液压制动补偿,bcm将滑行回收扭矩目标反馈回给vcu的同时,对电动汽车车轮上的液压制动进行控制。
3、然而,由于通信链路较长,vcu期望的滑行回收扭矩目标,通常延迟20ms后才最终向前后电机请求,影响了滑行回收控制的精准度及实时性。同时,bcm接收到的驱动电机实际扭矩实际为20ms之前电机反馈的,与收到的滑行回收扭矩目标始终存在10ms时间上的不同步,而由于bcm是基于这两者的差异来进行液压制动补偿的,因此容易导致制动超调的情况,影响驾驶感受。
技术实现思路
1、本申请提供一种滑行回收控制方法、整车控制器及电动汽车,用以解决现有技术中由于通信链路较长导致的滑行回收控制的精准度及实时性较差,以及容易导致制动超调的问题。
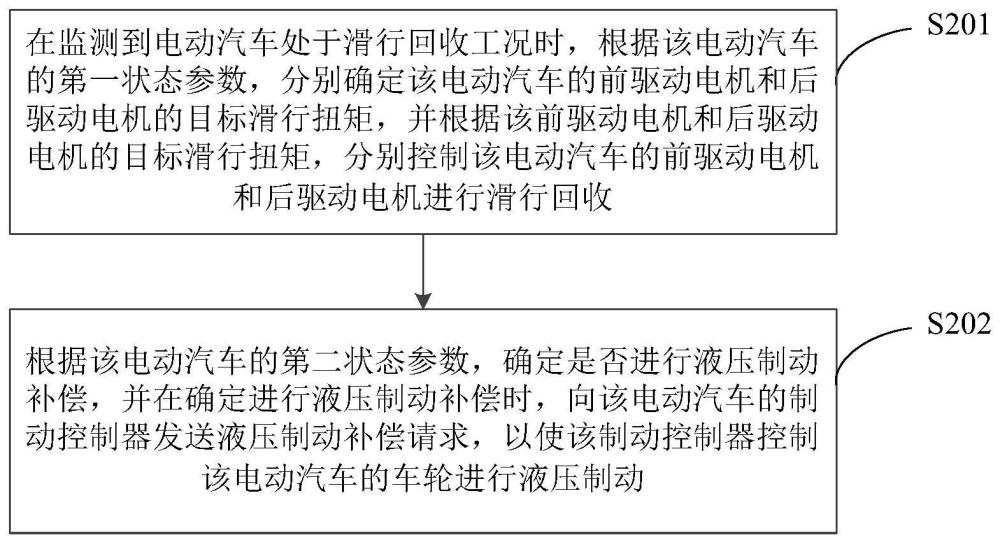
2、第一方面,本申请提供一种滑行回收控制方法,包括:在监测到电动汽车处于滑行回收工况时,根据所述电动汽车的第一状态参数,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩,并根据所述前驱动电机和后驱动电机的目标滑行扭矩,分别控制所述电动汽车的前驱动电机和后驱动电机进行滑行回收;根据所述电动汽车的第二状态参数,确定是否进行液压制动补偿,并在确定进行液压制动补偿时,向所述电动汽车的制动控制器发送液压制动补偿请求,以使所述制动控制器控制所述电动汽车的车轮进行液压制动。
3、在一种具体实施方式中,所述在确定进行液压制动补偿时,向所述电动汽车的制动控制器发送液压制动补偿请求,包括:在确定进行液压制动补偿时,通过车轮液压制动扭矩接口向所述电动汽车的制动控制器发送液压制动补偿请求。
4、在一种具体实施方式中,所述根据所述电动汽车的第一状态参数,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩,包括:根据所述电动汽车的驾驶性参数,能量回收等级和目标能耗,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩。
5、在一种具体实施方式中,所述根据所述电动汽车的第二状态参数,确定是否进行液压制动补偿,包括:根据所述电动汽车的当前减速度,车轮滑移率,动力电池的回收功率限值,驱动电机的工作状态参数以及能量回收等级,确定电液分配比例;根据所述电液分配比例,电机回收能力值,电池回收能力值以及当前减速度,确定是否进行液压制动补偿。
6、第二方面,本申请提供一种整车控制器,包括:处理模块,用于在监测到电动汽车处于滑行回收工况时,根据所述电动汽车的第一状态参数,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩;控制模块,用于根据所述前驱动电机和后驱动电机的目标滑行扭矩,分别控制所述电动汽车的前驱动电机和后驱动电机进行滑行回收;所述处理模块,还用于根据所述电动汽车的第二状态参数,确定是否进行液压制动补偿,并在确定进行液压制动补偿时,向所述电动汽车的制动控制器发送液压制动补偿请求,以使所述制动控制器控制所述电动汽车的车轮进行液压制动。
7、在一种具体实施方式中,所述处理模块具体用于:在确定进行液压制动补偿时,通过车轮液压制动扭矩接口向所述电动汽车的制动控制器发送液压制动补偿请求。
8、在一种具体实施方式中,所述处理模块具体用于:根据所述电动汽车的驾驶性参数,能量回收等级和目标能耗,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩。
9、在一种具体实施方式中,所述处理模块具体用于:根据所述电动汽车的当前减速度,车轮滑移率,动力电池的回收功率限值,驱动电机的工作状态参数以及能量回收等级,确定电液分配比例;根据所述电液分配比例,电机回收能力值,电池回收能力值以及当前减速度,确定是否进行液压制动补偿。
10、第三方面,本申请提供一种整车控制器,包括:处理器,存储器,通信接口;所述存储器用于存储所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行第一方面所述的滑行回收控制方法。
11、第四方面,本申请提供一种电动汽车,包括:如第二方面和第三方面所述的整车控制器以及制动控制器。
12、本申请提供的一种滑行回收控制方法、整车控制器及电动汽车,该方法包括在监测到电动汽车处于滑行回收工况时,根据该电动汽车的第一状态参数,分别确定该电动汽车的前驱动电机和后驱动电机的目标滑行扭矩,并根据该前驱动电机和后驱动电机的目标滑行扭矩,分别控制该电动汽车的前驱动电机和后驱动电机进行滑行回收;根据该电动汽车的第二状态参数,确定是否进行液压制动补偿,并在确定进行液压制动补偿时,向该电动汽车的制动控制器发送液压制动补偿请求,以使该制动控制器控制该电动汽车的车轮进行液压制动。相较于现有技术由整车控制器及制动控制器交互配合实现滑行回收和液压制动补偿,本申请的滑行回收控制方法可以由整车控制器确定前后驱动电机的目标滑行扭矩并控制前后驱动电机进行滑行回收的同时,确定是否进行液压制动补偿,并在确定进行液压制动补偿时,请求制动控制器控制车轮进行液压制动。如此,可以避免整车控制器和制动控制器之间的交互导致的延迟,能够缩短控制链路时延,提高控制精准度,更有效地避免制动超调,有效解决了现有技术中由于通信链路较长导致的滑行回收控制的精准度及实时性较差,以及容易导致制动超调的问题。
技术特征:
1.一种滑行回收控制方法,其特征在于,包括:
2.根据权利要求1所述的滑行回收控制方法,其特征在于,所述在确定进行液压制动补偿时,向所述电动汽车的制动控制器发送液压制动补偿请求,包括:
3.根据权利要求1或2所述的滑行回收控制方法,其特征在于,所述根据所述电动汽车的第一状态参数,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩,包括:
4.根据权利要求1或2所述的滑行回收控制方法,其特征在于,所述根据所述电动汽车的第二状态参数,确定是否进行液压制动补偿,包括:
5.一种整车控制器,其特征在于,包括:
6.根据权利要求5所述的整车控制器,其特征在于,所述处理模块具体用于:
7.根据权利要求5或6所述的整车控制器,其特征在于,所述处理模块具体用于:
8.根据权利要求5或6所述的整车控制器,其特征在于,包括:所述处理模块具体用于:
9.一种整车控制器,其特征在于,包括:
10.一种电动汽车,其特征在于,包括:如权利要求5至9中任一项所述的整车控制器以及制动控制器。
技术总结
本申请提供一种滑行回收控制方法、整车控制器及电动汽车。该方法包括:在监测到电动汽车处于滑行回收工况时,根据所述电动汽车的第一状态参数,分别确定所述电动汽车的前驱动电机和后驱动电机的目标滑行扭矩,并根据所述前驱动电机和后驱动电机的目标滑行扭矩,分别控制所述电动汽车的前驱动电机和后驱动电机进行滑行回收;根据所述电动汽车的第二状态参数,确定是否进行液压制动补偿,并在确定进行液压制动补偿时,向所述电动汽车的制动控制器发送液压制动补偿请求,以使所述制动控制器控制所述电动汽车的车轮进行液压制动。本申请的方法,能够缩短控制链路时延,提高控制精准度,更有效地避免制动超调。
技术研发人员:姚宇伟,刘东明,王剑,杨磊
受保护的技术使用者:武汉路特斯汽车有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!