一种电池箱转运臂及换电机器人的制作方法
本申请涉及换电机器人转运臂,尤其涉及一种电池箱转运臂及换电机器人。
背景技术:
1、现有技术中,换电机器人通常包括车架和电池箱转运臂,电池箱转运臂连接于车架,电池箱转运臂上连接有抓具,抓具能抓取电池箱,电池箱转运臂能伸缩运动带动电池箱移动,实现电池箱的转运。通常,电池箱转运臂首端的伸缩臂可活动地连接于车架,电池箱转运臂中的各伸缩臂中相邻的两者之间可滑动地连接,且相邻的两个伸缩臂之间设置有驱动部件,驱动部件可以为伸缩油缸,伸缩油缸伸缩运动驱动相邻的两个伸缩臂反向远离或相向靠拢。现有技术中,需要在相邻的伸缩臂之间设置一伸缩油缸,增加了成本,且使得电池箱转运臂结构复杂。
2、有鉴于此,特提出本实用新型。
技术实现思路
1、本实用新型提供一种电池箱转运臂及换电机器人。
2、本申请提供如下技术方案:
3、本申请第一目的在于提供一种电池箱转运臂,包括:
4、固定座;
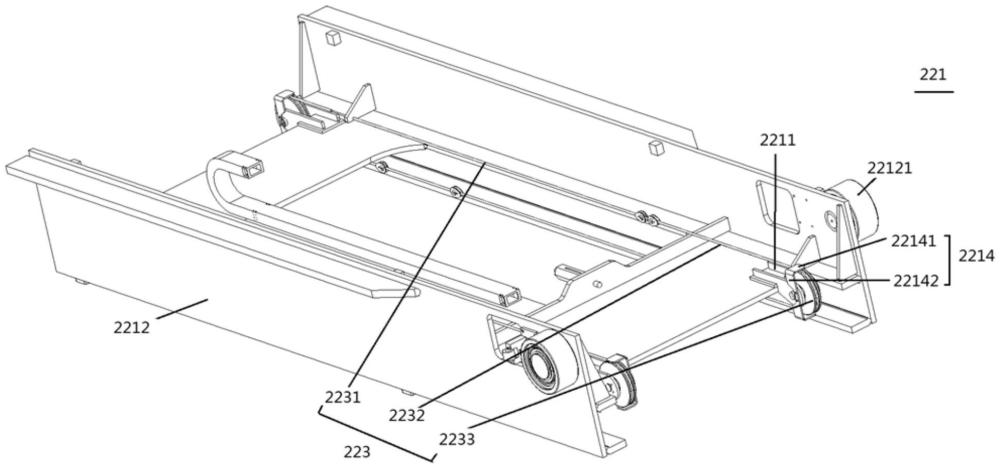
5、伸缩臂组件,所述伸缩臂组件具有第一伸缩臂和第二伸缩臂,所述第一伸缩臂和第二伸缩臂可移动地连接,且所述第一伸缩臂和第二伸缩臂传动配合,所述第一伸缩臂可滑动地连接于所述固定座;
6、驱动装置,所述驱动装置设置于所述固定座,所述驱动装置和所述第一伸缩臂传动连接,在所述驱动装置驱动所述第一伸缩臂伸出所述固定座的同时,所述第一伸缩臂驱动所述第二伸缩臂伸出所述第一伸缩臂。
7、可选的,所述第一伸缩臂上设置第一传动机构;
8、所述第一传动机构包括传动条和两个转向部件,两个所述转向部件分设于所述第一伸缩臂沿移动方向的两端,所述传动条套设于两个所述转向部件;
9、所述传动条位于所述转向部件一侧的条段固定于所述固定座,所述传动条位于所述转向部件另一侧的条段连接于所述第二伸缩臂。
10、可选的,电池箱转运臂包括拉线传感器,所述拉线传感器包括本体和卷绕于本体上的拉绳;
11、所述本体连接于所述固定座,所述拉绳的自由端连接于所述第一伸缩臂。
12、可选的,所述传动条位于所述转向部件两侧的两条段分别位于所述第一伸缩臂沿厚度方向的两侧。
13、可选的,所述第一伸缩臂的两端分别设置有安装座,所述安装座具有间隔设置的两个支撑臂,所述转向部件位于两个所述支撑臂之间,且所述转向部件和所述安装座可转动地连接。
14、可选的,所述转向部件的周侧端面开设有线槽,所述传动条嵌入于所述线槽内。
15、可选的,所述安装座上连接有限位件,所述限位件延伸至靠近所述转向部件的周侧端面。
16、可选的,所述固定座包括间隔设置的两个第一轨道条,所述第一轨道条具有第一轨道槽;
17、所述第一伸缩臂具有两个第二轨道条,两个所述第二轨道条分别可移动地连接于相应的第一轨道槽。
18、可选的,所述第一轨道条靠近所述第一伸缩臂伸出的一端设置有第一滚轮,所述第一滚轮位于所述第一轨道槽的端部;
19、所述第二轨道条具有第二滚轮,所述第二滚轮容纳于所述第一轨道槽内,所述第二轨道条支撑于第一滚轮上。
20、可选的,所述第二轨道条具有第二轨道槽;
21、所述第二伸缩臂两侧分别设置第三滚轮,所述第三滚轮容纳于所述第二轨道槽。
22、本申请第二目的在于提供一种换电机器人,包括:
23、车架,所述车架具有行走机构;
24、电池箱转运臂,所述电池箱转运臂的固定座连接于所述车架。
25、通过采用上述技术方案,使得本申请具有如下有益效果:
26、本申请的电池箱转运臂的伸缩臂组件的第一伸缩臂和第二伸缩臂之间未设置驱动装置,而是直接传动连接,在驱动第一伸缩臂平移时,第一伸缩臂能同时驱动第二伸缩臂平移,不需要在第一伸缩臂和第二伸缩臂之间设置伸缩油缸,降低了成本,简化了电池箱转运臂的结构。
27、下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
技术特征:
1.一种电池箱转运臂,其特征在于,包括:
2.根据权利要求1所述的电池箱转运臂,其特征在于,所述第一伸缩臂上设置第一传动机构;
3.根据权利要求2所述的电池箱转运臂,其特征在于,包括拉线传感器,所述拉线传感器包括本体和卷绕于本体上的拉绳;
4.根据权利要求2所述的电池箱转运臂,其特征在于,所述传动条位于所述转向部件两侧的两条段分别位于所述第一伸缩臂沿厚度方向的两侧。
5.根据权利要求2所述的电池箱转运臂,其特征在于,所述第一伸缩臂的两端分别设置有安装座,所述安装座具有间隔设置的两个支撑臂,所述转向部件位于两个所述支撑臂之间,且所述转向部件和所述安装座可转动地连接。
6.根据权利要求5所述的电池箱转运臂,其特征在于,所述转向部件的周侧端面开设有线槽,所述传动条嵌入于所述线槽内。
7.根据权利要求6所述的电池箱转运臂,其特征在于,所述安装座上连接有限位件,所述限位件延伸至靠近所述转向部件的周侧端面。
8.根据权利要求1所述的电池箱转运臂,其特征在于,所述固定座包括间隔设置的两个第一轨道条,所述第一轨道条具有第一轨道槽;
9.根据权利要求8所述的电池箱转运臂,其特征在于,所述第一轨道条靠近所述第一伸缩臂伸出的一端设置有第一滚轮,所述第一滚轮位于所述第一轨道槽的端部;
10.根据权利要求8所述的电池箱转运臂,其特征在于,所述第二轨道条具有第二轨道槽;
11.一种换电机器人,其特征在于,包括:
技术总结
本申请公开一种电池箱转运臂及换电机器人,电池箱转运臂包括:固定座、伸缩臂组件和驱动装置。伸缩臂组件具有第一伸缩臂和第二伸缩臂,第一伸缩臂和第二伸缩臂可移动地连接,且第一伸缩臂和第二伸缩臂传动配合,第一伸缩臂可滑动地连接于固定座。驱动装置设置于固定座,驱动装置和第一伸缩臂传动连接,在驱动装置驱动第一伸缩臂伸出固定座的同时,第一伸缩臂驱动第二伸缩臂伸出第一伸缩臂。本申请的伸缩臂组件的第一伸缩臂和第二伸缩臂之间未设置驱动装置,而是直接传动连接,在驱动第一伸缩臂平移时,第一伸缩臂能同时驱动第二伸缩臂平移,不需要在第一伸缩臂和第二伸缩臂之间设置伸缩油缸,降低了成本,简化了电池箱转运臂的结构。
技术研发人员:杨轶,郭鹏,刘须宝
受保护的技术使用者:湖南融青能源科技有限公司
技术研发日:20230222
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!