一种精准定位的智能化自卸料装置的制作方法
本技术属于工程车料卸料控制,尤其涉及一种精准定位的智能化自卸料装置。
背景技术:
1、现阶段无论是道路用车还是非道路用车(例如宽体式矿卡等不在铺装道路上行驶的车辆)的倒车定位手段主要包含倒车影像与倒车雷达两种。其中,倒车影像主要通过安装在车身后面的摄像头来进行倒车视野的捕捉,从而给驾驶员提供可以确定倒车位置的实时视频影像,来辅助驾驶员完成倒车制动;倒车雷达主要是通过安装在车身后面的雷达发射器,发射超声波来进行障碍物的测距。当车辆与障碍物距离较近时,倒车雷达会通过语音报警来提示驾驶员及时踩刹车来进行制动驻车。
2、倒车影像技术可提供给驾驶员的信息更多,因此应用范围更广。对驾驶员的倒车可提供一定程度上的帮助,但要求驾驶员通过车内屏幕实时观察倒车位置,以确保在到达合适位置时驾驶员可以完成制动驻车,此过程受驾驶员驾驶技术差异往往很难实现较为精准的制动驻车。
3、以非道路用车中的宽体矿卡为例,驾驶员在进行土方分离时,往往需要将泥加石等非好料从矿山某一具体位置的斜坡上自上向下倾卸货料,以便后续的筛料与售卖。但是由于矿山上道路环境差且此工作需要驾驶员有较为娴熟的倒车技术,因此单纯依靠倒车影像技术往往会出现卸料不完全,甚至很多货料堆积在卸料处的情况。此时便需要推土机将堆积的货料推下斜坡,费时费力。更有驾驶不娴熟与疲劳疏忽的司机,将卡车倒入山下,造成车毁人亡的事故发生;驾驶员在卸一些好料时,通常是向安设在铺装路面上的机口卸料平台倾卸货料,这种情况下通常需要沿机口拉出两条直线用于对正车身,驾驶员通过倒车影像观察车身与前述两条直线的平行度及距离来控制卸料。对于晚上动工拉矿卸料的情况,倒车影像的应用会显得更加力不从心。
4、而由于倒车雷达技术适用于车后障碍物的测距,此技术并不适用宽体式矿卡等需要倒车定位卸料的特种工程车辆。
5、由此可见,现有技术的诸多弊端,有待于进一步地改进和提高。
技术实现思路
1、本实用新型提供了一种精准定位的智能化自卸料装置,以解决上述技术问题的至少一个技术问题。
2、本实用新型所采用的技术方案为:
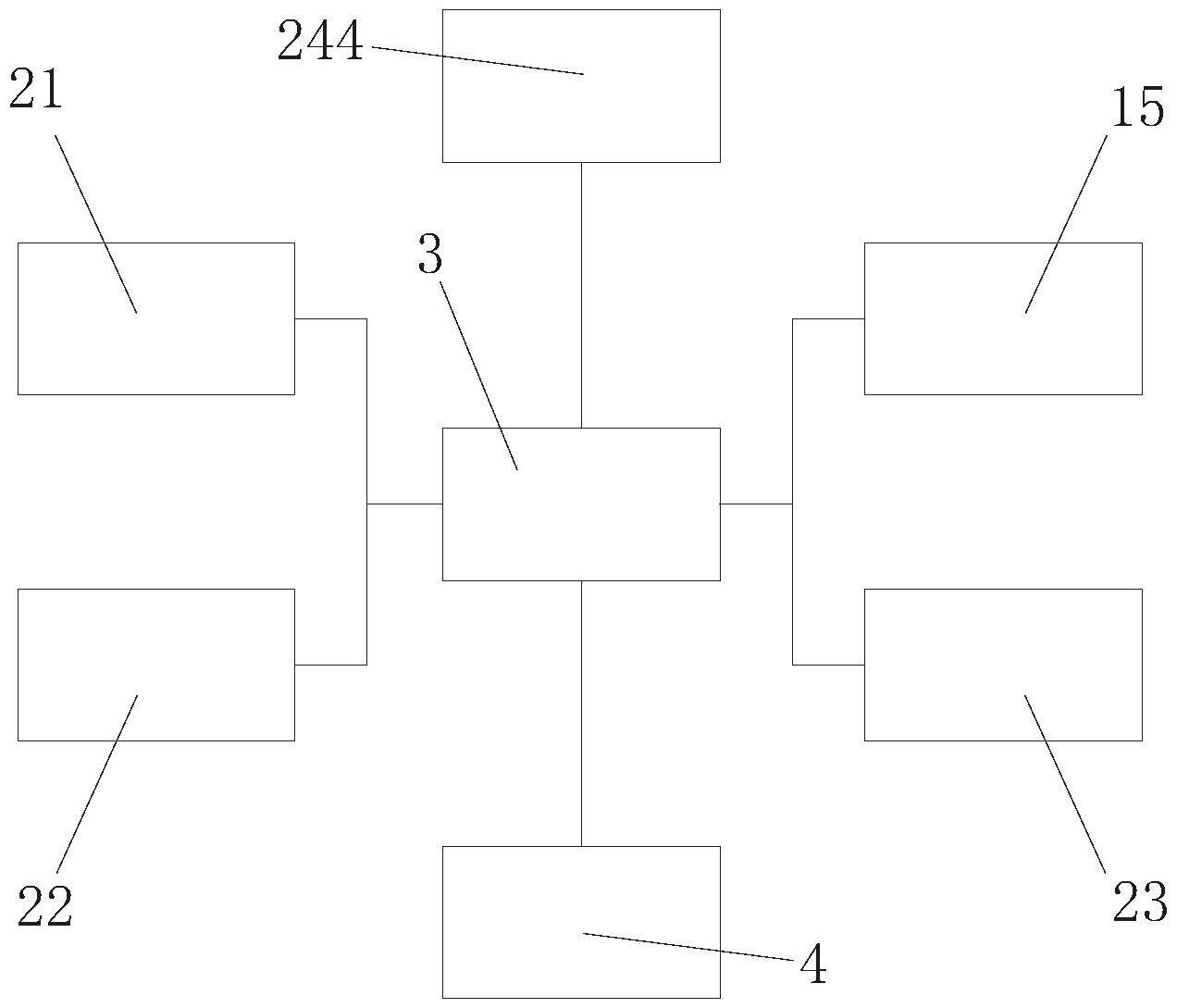
3、本实用新型提供了一种精准定位的智能化自卸料装置,所述智能化自卸料装置与矿卡相连接,用于所述矿卡到达卸料位置前的自动行驶控制及所述矿卡到达卸料位置后的卸料动作的控制;所述智能化自卸料装置包括控制器、监测组件以及卸料组件;所述监测组件及所述卸料组件与所述矿卡相连接,所述监测组件用于监测所述矿卡的行驶状态及其周边环境,所述卸料组件用于举升或收起所述矿卡的料斗以完成卸料动作;所述控制器分别与所述监测组件和所述卸料组件相连接,且所述控制器设置在所述矿卡的驾驶室内部并与所述矿卡的动力系统相连接,所述控制器能够控制所述动力系统和所述卸料组件的启停。
4、作为本申请的一种优选实施方式,所述监测组件包括激光测距组件以及车轮测速组件;所述激光测距组件与所述矿卡的底盘相连接,用于检测所述矿卡的行驶路线上地面的高度变化和/或所述矿卡与后方接料装置之间的距离并输出相应的距离信号;所述车轮测速组件用于检测所述矿卡车轮的转速并输出相应的转速信号。
5、作为本申请的一种优选实施方式,所述激光测距组件包括与所述底盘相连接的第一激光距离传感器和第二激光距离传感器,所述第一激光距离传感器用于检测所述矿卡最后一排车轮处的路面高度变化,所述第二激光距离传感器用于检测所述矿卡后方行驶路线上地面的高度变化和/或所述矿卡与后方接料装置之间的距离。
6、作为本申请的一种优选实施方式,沿所述底盘的延伸方向,所述第一激光距离传感器和所述第二激光距离传感器设置位置位于所述底盘的中轴线上;且沿竖直方向,所述第一激光距离传感器设置在所述第二激光距离传感器的下方。
7、作为本申请的一种优选实施方式,所述车轮测速组件包括至少两组转速传感器,用于检测所述矿卡的后排两侧车轮的转速。
8、作为本申请的一种优选实施方式,所述激光测距组件和所述车轮测速组件还均设置有外护壳,所述外护壳与所述底盘相连接且所述第一激光距离传感器、所述第二激光距离传感器以及所述转速传感器均设置在所述外护壳的内部。
9、作为本申请的一种优选实施方式,所述外护壳包括主体,所述主体开设有与所述第一激光距离传感器、所述第二激光距离传感器以及所述转速传感器相对应的感应口;所述外护壳还包括与所述主体相连接的感应开关,所述感应开关能够相对所述主体移动以打开或关闭所述感应口。
10、作为本申请的一种优选实施方式,所述感应开关为设置在所述感应口处的遮板,所述遮板用于打开或关闭所述感应口。
11、作为本申请的一种优选实施方式,所述卸料装置包括设置在所述底盘上部的基座以及设置在所述基座上部的举升装置,所述举升装置与所述料斗相连接;所述料斗能够在所述举升装置的带动下相对所述底盘移动以实现卸料。
12、作为本申请的一种优选实施方式,还包括远程控制装置,所述远程控制装置能够与所述控制器实现无线连接并能够通过所述控制器控制所述动力系统和所述卸料组件的启停。
13、由于采用了上述技术方案,本实用新型所取得的有益效果为:
14、1.作为本申请的一种优选实施方式,本申请中的智能化自卸料装置能够实现对矿卡到达卸料位置前的自动行驶控制及所述矿卡到达卸料位置后的卸料动作的控制,相较于现有技术中驾驶员参照倒车影像进行人工操作的卸料方式而言大大降低了驾驶员的劳动强度,且能够降低由于驾驶员驾驶技术不娴熟、道路情况不熟以及疲劳驾驶等因素导致危险事故发生的风险,大大提升生产的安全性。
15、2.作为本申请的一种优选实施方式,现有技术中驾驶员参照倒车影像进行人工操作的卸料方式而言,采用本申请中的智能化自卸料装置能够大大减少光线条件对矿卡卸料操作的影响。
16、3.作为本申请的一种优选实施方式,本申请中的监测装置能够对矿卡倒卸料倒车路线上的路面高度变化和车轮转速进行实时的检测,从而可以方便在车后出现卸料陡坡和或出现路面塌陷使得两侧后轮转速不同时对车辆进行控制实现驻车或驶离,避免出现生产事故。
技术特征:
1.一种精准定位的智能化自卸料装置,其特征在于,所述智能化自卸料装置与矿卡相连接,用于所述矿卡到达卸料位置前的自动行驶控制及所述矿卡到达卸料位置后的卸料动作的控制;
2.如权利要求1所述的精准定位的智能化自卸料装置,其特征在于,所述监测组件包括激光测距组件以及车轮测速组件;所述激光测距组件与所述矿卡的底盘相连接,用于检测所述矿卡的行驶路线上地面的高度变化和/或所述矿卡与后方接料装置之间的距离并输出相应的距离信号;所述车轮测速组件用于检测所述矿卡车轮的转速并输出相应的转速信号。
3.如权利要求2所述的精准定位的智能化自卸料装置,其特征在于,所述激光测距组件包括与所述底盘相连接的第一激光距离传感器和第二激光距离传感器,所述第一激光距离传感器用于检测所述矿卡最后一排车轮处的路面高度变化,所述第二激光距离传感器用于检测所述矿卡后方行驶路线上地面的高度变化和/或所述矿卡与后方接料装置之间的距离。
4.如权利要求3所述的精准定位的智能化自卸料装置,其特征在于,沿所述底盘的延伸方向,所述第一激光距离传感器和所述第二激光距离传感器设置位置位于所述底盘的中轴线上;且沿竖直方向,所述第一激光距离传感器设置在所述第二激光距离传感器的下方。
5.如权利要求3所述的精准定位的智能化自卸料装置,其特征在于,所述车轮测速组件包括至少两组转速传感器,用于检测所述矿卡的后排两侧车轮的转速。
6.如权利要求5所述的精准定位的智能化自卸料装置,其特征在于,所述激光测距组件和所述车轮测速组件还均设置有外护壳,所述外护壳与所述底盘相连接且所述第一激光距离传感器、所述第二激光距离传感器以及所述转速传感器均设置在所述外护壳的内部。
7.如权利要求6所述的精准定位的智能化自卸料装置,其特征在于,所述外护壳包括主体,所述主体开设有与所述第一激光距离传感器、所述第二激光距离传感器以及所述转速传感器相对应的感应口;所述外护壳还包括与所述主体相连接的感应开关,所述感应开关能够相对所述主体移动以打开或关闭所述感应口。
8.如权利要求7所述的精准定位的智能化自卸料装置,其特征在于,所述感应开关为设置在所述感应口处的遮板,所述遮板用于打开或关闭所述感应口。
9.如权利要求7所述的精准定位的智能化自卸料装置,其特征在于,所述卸料装置包括设置在所述底盘上部的基座以及设置在所述基座上部的举升装置,所述举升装置与所述料斗相连接;所述料斗能够在所述举升装置的带动下相对所述底盘移动以实现卸料。
10.如权利要求9所述的精准定位的智能化自卸料装置,其特征在于,还包括远程控制装置,所述远程控制装置能够与所述控制器实现无线连接并能够通过所述控制器控制所述动力系统和所述卸料组件的启停。
技术总结
本申请公开了一种精准定位的智能化自卸料装置,用于矿卡到达卸料位置前的自动行驶控制及矿卡到达卸料位置后的卸料动作的控制,包括控制器、监测组件以及卸料组件;监测组件及卸料组件与矿卡相连接,监测组件用于监测矿卡的行驶状态及其周边环境,卸料组件用于举升或收起矿卡的料斗以完成卸料动作;控制器分别与监测组件和卸料组件相连接,且控制器设置在矿卡的驾驶室内部并与矿卡的动力系统相连接,控制器能够控制动力系统和卸料组件的启停。相较于现有驾驶员参照倒车影像人工操作的方式而言,自动化程度以及车辆控制的精准度大大提升,卸料效率更高且大大降低了驾驶员及引导员等相关生产人员的劳动强度。
技术研发人员:张学刚,沈文臣,马帅,张兵
受保护的技术使用者:深圳得到运通科技有限公司
技术研发日:20230224
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!