一种机器人的底盘的制作方法
本技术属于机器人,具体为一种机器人的底盘。
背景技术:
1、随着人工智能技术的飞速发展,机器人在功能和技术层次上有了很大的提高,机器人底盘是机器人整个系统的重要承载部件,用于安装电池、控制主板和传动系统等部件,然而现有的机器人底盘无法对路面的杂物进行破碎的工作,致使路面的杂物容易对机器人的移动造成阻碍,导致机器人行驶于复杂路面时无法正常移动,进而则会影响其工作过程。
技术实现思路
1、为了克服上述缺陷,本实用新型提供了一种机器人的底盘,解决了现有的机器人底盘无法对路面的杂物进行破碎的工作,致使路面的杂物容易对机器人的移动造成阻碍,导致机器人行驶于复杂路面时无法正常移动,进而则会影响其工作过程的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人的底盘,包括底盘,所述底盘的正面固定连接有两个固定杆,两个所述固定杆的另一端分别固定连接有连接板,两个所述连接板内分别卡接有两个轴承,其中两个所述轴承内转动连接有同一个滚轴,其中一个所述滚轴的一端固定连接有电机。
3、所述电机的输出轴与其中一个滚轴的一端固定连接,两个所述滚轴外分别固定连接有破碎辊和辊柱,所述辊柱外开设有滑槽,所述滑槽内设有滑杆,所述滑杆的底端固定连接有推动铲,两个所述滚轴外分别固定连接有齿轮,两个所述齿轮啮合。
4、作为本实用新型的进一步方案:所述滑杆外固定连接有伸缩杆,所述伸缩杆的另一端与其中一个连接板的一侧固定连接。
5、作为本实用新型的进一步方案:所述电机外固定连接有电机固定块,所述电机固定块的一侧与其中一个连接板的一侧固定连接。
6、作为本实用新型的进一步方案:所述底盘的底部固定连接有移动轮,所述移动轮的数量为四个。
7、作为本实用新型的进一步方案:所述底盘的上方固定连接有安装座,所述安装座内开设有开槽。
8、作为本实用新型的进一步方案:所述开槽的两侧分别固定连接有电动推杆,两个所述电动推杆的另一端分别固定连接有固定卡箍。
9、与现有技术相比,本实用新型的有益效果在于:
10、1、该机器人的底盘,通过设置滚轴、辊柱、滑槽、滑杆、齿轮和破碎辊,使得电机的输出轴带动其中一个滚轴进行转动,使得其中一个滚轴带动破碎辊进行转动,以达到对路面的杂物进行破碎工作,同时其中一个滚轴带动其中一个齿轮进行转动,使得与之啮合的另一个齿轮即可带动另一个滚轴进行转动,以达到辊柱转动时利用卡槽为弧形促使滑杆在内可以顺利的进行左右往返移动,以达到滑杆带动推动铲即可对破碎后的杂物推动至两边,从而利用此装置使得底盘无可以将路面的杂物进行破碎的工作,致使路面的杂物不会对机器人的移动造成阻碍,导致机器人可以行驶于复杂路面,进而避免影响其工作过程。
11、2、该机器人的底盘,通过设置电动推杆和固定卡箍,使得两个电动推杆分别带动固定卡箍进行相互靠近的工作,使得两个固定卡箍相互靠近至一定位置时,即可对机器人的底部进行固定,防止机器人位于底盘内时,发生摔落的情况。
12、3、该机器人的底盘,通过设置伸缩杆,伸缩杆使得滑杆进行移动时具备良好的稳定性,从而使得滑杆在滑槽内移动时不会发生偏移或者脱落的情况,从而确保推动铲可以平稳的将路面上破碎后的杂物推动至两边。
技术特征:
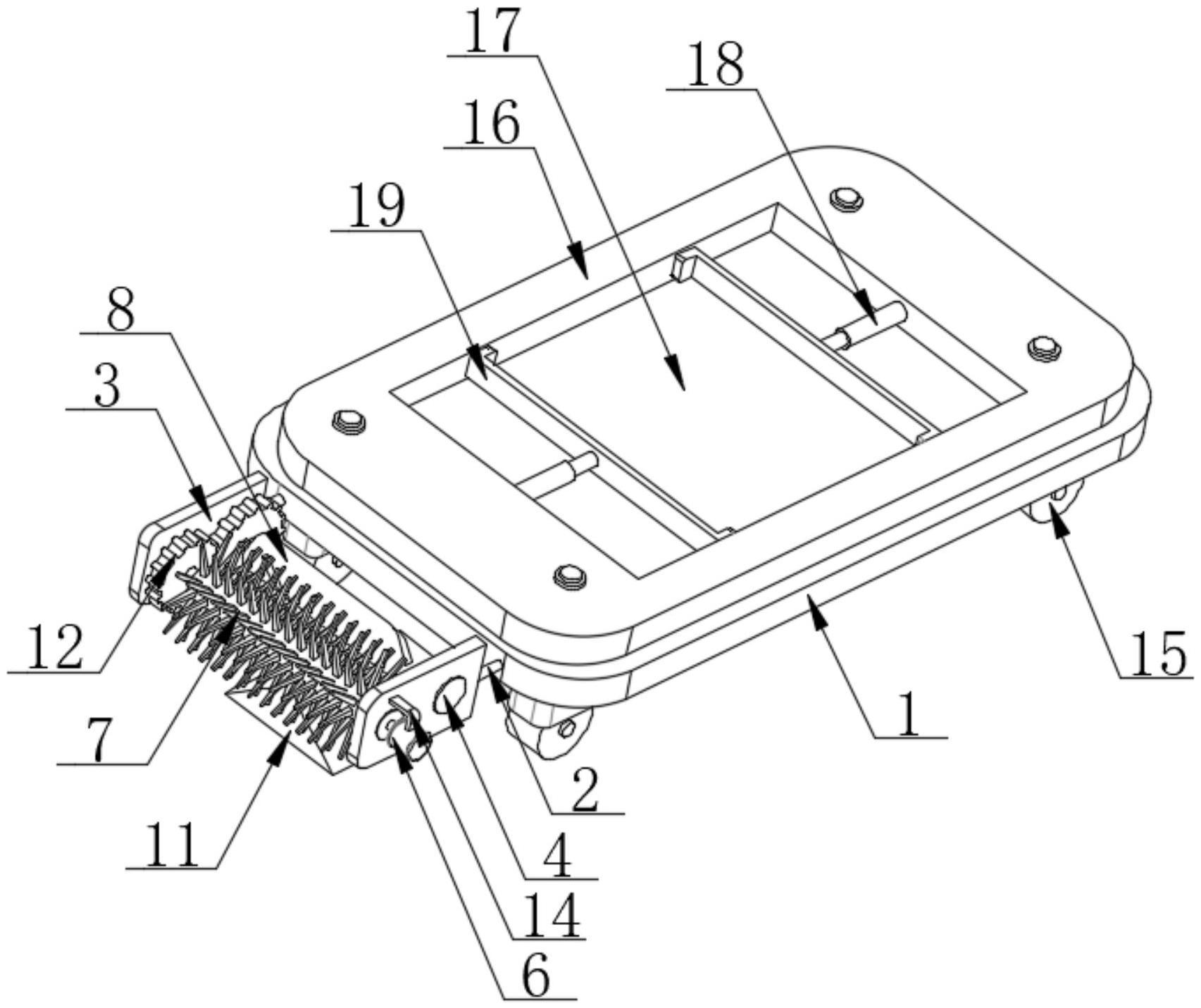
1.一种机器人的底盘,包括底盘(1),其特征在于:所述底盘(1)的正面固定连接有两个固定杆(2),两个所述固定杆(2)的另一端分别固定连接有连接板(3),两个所述连接板(3)内分别卡接有两个轴承(4),其中两个所述轴承(4)内转动连接有同一个滚轴(5),其中一个所述滚轴(5)的一端固定连接有电机(6);
2.根据权利要求1所述的一种机器人的底盘,其特征在于:所述滑杆(10)外固定连接有伸缩杆(13),所述伸缩杆(13)的另一端与其中一个连接板(3)的一侧固定连接。
3.根据权利要求1所述的一种机器人的底盘,其特征在于:所述电机(6)外固定连接有电机固定块(14),所述电机固定块(14)的一侧与其中一个连接板(3)的一侧固定连接。
4.根据权利要求1所述的一种机器人的底盘,其特征在于:所述底盘(1)的底部固定连接有移动轮(15),所述移动轮(15)的数量为四个。
5.根据权利要求1所述的一种机器人的底盘,其特征在于:所述底盘(1)的上方固定连接有安装座(16),所述安装座(16)内开设有开槽(17)。
6.根据权利要求5所述的一种机器人的底盘,其特征在于:所述开槽(17)的两侧分别固定连接有电动推杆(18),两个所述电动推杆(18)的另一端分别固定连接有固定卡箍(19)。
技术总结
本技术公开了一种机器人的底盘,属于机器人技术领域,其包括底盘,所述底盘的正面固定连接有两个固定杆,两个所述固定杆的另一端分别固定连接有连接板。该机器人的底盘,通过设置滚轴、辊柱、滑槽、滑杆、齿轮和破碎辊,使得电机的输出轴带动其中一个滚轴进行转动,使得其中一个滚轴带动破碎辊进行转动,以达到对路面的杂物进行破碎工作,同时其中一个滚轴带动其中一个齿轮进行转动,以达到滑杆带动推动铲即可对破碎后的杂物推动至两边,从而利用此装置使得底盘无可以将路面的杂物进行破碎的工作,致使路面的杂物不会对机器人的移动造成阻碍,导致机器人可以行驶于复杂路面,进而避免影响其工作过程。
技术研发人员:陈建敏
受保护的技术使用者:济南尚艺数控科技有限公司
技术研发日:20230531
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!