一种无刷电动刮雨器单传感器双复位位置定位及调整器的制作方法
本技术涉及刮雨器,具体涉及一种无刷电动刮雨器单传感器双复位位置定位及调整器。
背景技术:
1、目前,公知的高铁刮雨器多为气动刮雨器系统和采用有刷直流电机驱动的电动刮雨器系统。刮雨器总成含有减速电动机(或气缸)、四连杆机构、刮水臂、刮水片等。当司机按下雨刮器的开关时,电动机(或气缸)启动,电动机的驱动转速经过机构变换为驱动摆臂的摆动和刮片的刮刷动作。
2、随着客户对产品功能不断提升拓展的要求,就需要刮雨器有两个可选择的停机位用于不同的功能和目的,由于受产品空间结构的限制、控制电路复杂性和成本的制约,刮雨器系统一般只配置一个位置传感器,一对一定位实现绝对位置(“一号位”)锁定,但传感器几何位置(“一号位”)之外的另一个相对停机位(“二号位”)就需要采用其它方式来定位,该位置(“二号位”)是一个模拟计算位置,产品出厂前会按规定预先调试好,但在用户现场安装时受实际工况的变化(主要是指内部调试负载和车辆实际负载有区别)、车体预留的安装位置精度不高等多方面因素影响,致使其(“二号位”)往往失准,角度超差时就需要拆机调整,给产品安装使用带来不便。
技术实现思路
1、本实用新型所要解决的问题是:提供一种无刷电动刮雨器单传感器双复位位置定位及调整器,可以基于单一位置传感器,给刮雨器用户提供两个可调的停机位,满足刮雨器实用功能的拓展,结构简单,调整便捷,实用高效。
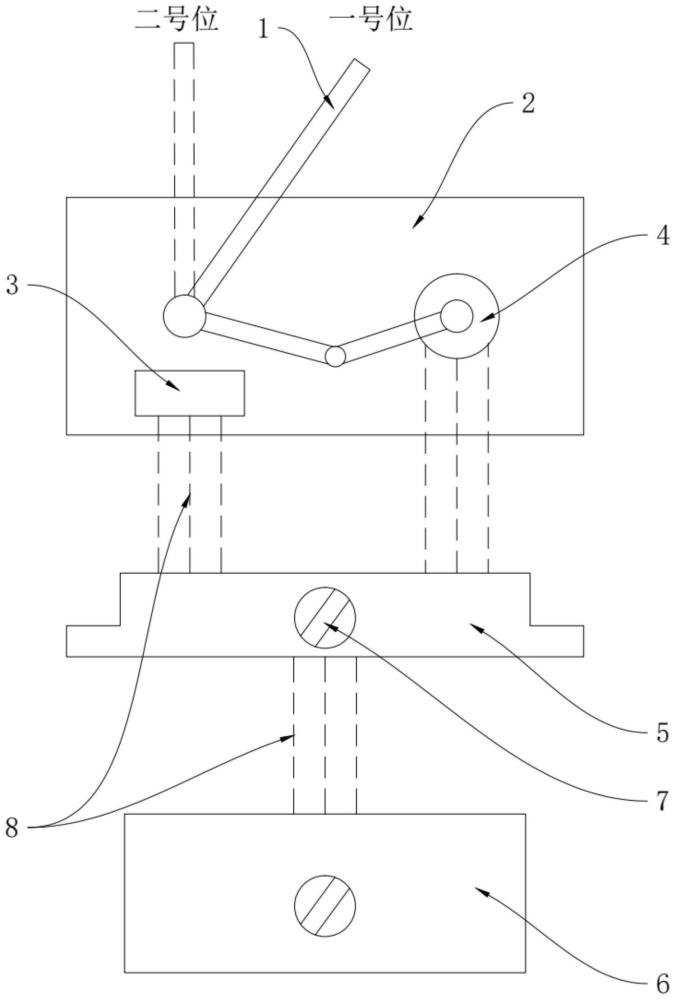
2、本实用新型为解决上述问题所提供的技术方案为:一种无刷电动刮雨器单传感器双复位位置定位及调整器,包括刮臂刮片、驱动组件和驱动控制器;
3、所述驱动组件用于驱动所述刮臂刮片摆动,所述驱动组件包括驱动器和位置传感器,所述所述驱动组件与驱动控制器电连接;
4、所述驱动控制器根据指令控制所述驱动组件驱动所述刮臂刮片运行到达位置传感器所处绝对位置时立即或者是延时停止运转。
5、优选的,还包括操作开关,所述操作开关可以对所述驱动控制器发出指令。
6、优选的,所述操作开关有两个操作档位。
7、优选的,所述驱动器为无刷电机。
8、优选的,所述驱动控制器内部设置有定位调整器。
9、优选的,所述驱动组件还包括四连杆机构。
10、与现有技术相比,本实用新型的优点是:本实用新型可以基于单一位置传感器,给刮雨器用户提供两个可调的停机位,满足刮雨器实用功能的拓展,结构简单,调整便捷,实用高效。
技术特征:
1.一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:包括刮臂刮片(1)、驱动组件(2)和驱动控制器(5);
2.根据权利要求1所述的一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:还包括操作开关(6),所述操作开关(6)可以对所述驱动控制器(5)发出指令。
3.根据权利要求2所述的一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:所述操作开关(6)有两个操作档位。
4.根据权利要求1所述的一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:所述驱动器为无刷电机(4)。
5.根据权利要求1所述的一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:所述驱动控制器(5)内部设置有定位调整器(7)。
6.根据权利要求1所述的一种无刷电动刮雨器单传感器双复位位置定位及调整器,其特征在于:所述驱动组件(2)还包括四连杆机构。
技术总结
本技术公开了一种无刷电动刮雨器单传感器双复位位置定位及调整器,包括刮臂刮片、驱动组件和驱动控制器;所述驱动组件用于驱动所述刮臂刮片摆动,所述驱动组件包括驱动器和位置传感器,所述驱动组件与驱动控制器电连接;所述驱动控制器根据指令控制所述驱动组件驱动所述刮臂刮片运行到达位置传感器所处绝对位置时立即或者是延时停止运转。本技术可以基于单一位置传感器,给刮雨器用户提供两个可调的停机位,满足刮雨器实用功能的拓展,结构简单,调整便捷,实用高效。
技术研发人员:宋钊,宋广德,马晓东
受保护的技术使用者:南昌喜瑞机电有限公司
技术研发日:20230823
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!