基于差动转向的路径跟踪控制方法与流程
本发明涉及了一种基于差动转向的路径跟踪控制方法,属于汽车转向控制。
背景技术:
1、与传统的燃油汽车有着显著的区别,分布式线控底盘采用四个轮毂电机作为驱动单元,而且每个电机都能独立地输出扭矩。这种设计使得车辆在转弯时具备更高的灵活性和操控性。
2、当车辆的转向电机或其他转向执行机构出现故障时,且在无人驾驶或者驾驶员的转向意图始终能够被转向系统准确接收的情况下,分布式线控底盘能够通过改变左右轮的纵向驱动力矩,使得左右轮产生期望的驱动力矩差,在原有转向系中的转向梯形机构下保证车辆转向的一致性,从而实现差动转向。因此如何将差动转向应用在汽车路径跟踪中以提高汽车驾驶的操控性成为了申请人亟待解决的技术问题。
技术实现思路
1、本发明的目的在于,提供一种基于差动转向的路径跟踪控制方法。本发明可以实现较好的路径跟踪性能,提高了汽车行驶操控性能、稳定性和转弯性能。
2、本发明的技术方案:基于差动转向的路径跟踪控制方法,包括如下步骤:
3、步骤1、建立基于差动转向的车辆动力学模型;
4、步骤2、根据车辆差动转向车辆动力学方程构建mpc横向轨迹跟踪控制器;
5、步骤3、基于载荷分配法将mpc横向轨迹跟踪控制器输出的前后轴左右两轮驱动力矩差所产生的额外横摆力矩进行力矩分配。
6、上述的基于差动转向的路径跟踪控制方法,所述车辆动力学模型表示如下:
7、
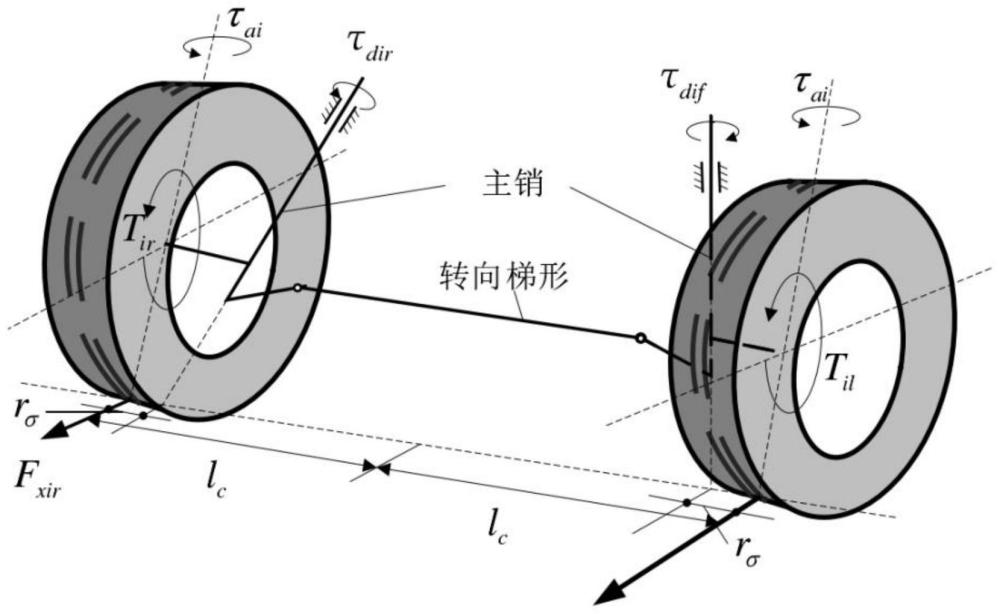
8、式中:为车轮角速度的一阶导;iz为车辆的纵向转动惯量,;fxij和fyij分别表示车身坐标系下x轴和y轴下的轮胎力,i∈{f,r},j∈{l,r},{f,r}表示前后,{l,r}表示左右,x轴正向指向车辆水平向前方向,y轴正向指向车辆的左侧;lf和lr分别为车辆前后轴到质心的距离;δmzf为前轴两轮驱动力矩差所产生的额外横摆力矩;δmzr后轴左右两轮驱动力矩差所产生的额外横摆力矩;为横向加速度的一阶导;m为车辆质量;vx为纵向加速度,vy为横向加速度;ω为车轮角速度;为车辆的横向位置的一阶倒数;为车身横摆角;和分别为前轮和后轮转角的一阶导,bf和br分别表示前轴转向系统和后轴转向系统的等效阻尼;τzf和τzr分别表示前后轴的额外回正力矩;rσ为主销的延长线和地面的交点距离;lc为前后轮轮距的一半;
9、当前轮侧偏角较小时,轮胎的横向力表达为:
10、fyi=ciai;
11、式中:ci表示轮胎侧偏刚度;αi为αf或αr,αf和αr分别表示为前后轮侧偏角,计算方式为:
12、
13、其中,δf和δr分别为前轮和后轮转角;
14、则联立整理得:
15、
16、当只考虑前轴差动转向时,后轮的左右车轮驱动力平局分配不再产生驱动力矩差,则基于前轴差动转向的车辆动力学模型表示如下:
17、
18、前述的基于差动转向的路径跟踪控制方法,所述mpc横向轨迹跟踪控制器的构建是先将建立的差动转向车辆动力学方程统一状态空间方程形式,然后对状态空间方程依次进行线性化和离散化,并以此获得mpc横向轨迹跟踪控制器的输出方程,再定义mpc横向轨迹跟踪控制器的目标函数,使控制输出值逼近离线参考输出值,并使控制输入值尽可能小。
19、前述的基于差动转向的路径跟踪控制方法,所述状态空间方程表示如下:
20、
21、式中:x为k时刻的系统状态变量,当车辆基于前后轴差动转向时,x其中包括车辆的横摆角速度、纵向车速和前后轮转角,即为k时刻的系统状态变量的一阶导;u为控制输入量,其中为前后轴左右两轮驱动力矩差所产生的额外横摆力矩,即u=[δmzf,δmzr]t;f为函数表达形式;η为趋近律中的固定的因子表达形式;c为轮胎侧偏刚度;当车辆只有前轴差动转向时,状态变量控制输入量为前轴驱动力矩差所产生的额外横摆力矩u=δmzf。
22、当车辆只有前轴差动转向时,状态变量控制输入量为前轴驱动力矩差所产生的额外横摆力矩u=δmzf。
23、前述的基于差动转向的路径跟踪控制方法,所述状态空间方程的线性化是通过泰勒级数展开来得到线性模型:
24、
25、其中,
26、前述的基于差动转向的路径跟踪控制方法,所述状态空间方程的离散化是将线性模型转化为差动方程:
27、
28、式中:ak=ta+e,bk=tb,t为采样时间。
29、前述的基于差动转向的路径跟踪控制方法,所述mpc横向轨迹跟踪控制器的输出方程获取先根据线性化和离散化预测时域np个时刻的x,公式如下:
30、x(k+1)=akx(k)+bku(k)+d(k)
31、x(k+2)=ak2x(k)+akbku(k)+bku(k+1)+aka(k)+d(k+1)
32、x(k+2)=ak3x(k)+ak2bku(k)+akbku(k+1)+bku(k+2)+ak2d(k)+akd(k+1)+d(k+2)
33、
34、再获取预测时域np个时刻的η为:
35、η(k+1)=cakx(k)+cbku(k)+cd(k)
36、η(k+2)=cak2x(k)+cakbku(k)+cbku(k+1)+cakd(k)+cd(k+1)
37、
38、由此得到输出方程:
39、y(k)=ψk(k)ξ(k)+θku(k)+γkφ(k);
40、其中:nc为设置的控制时域。
41、前述的基于差动转向的路径跟踪控制方法,所述mpc横向轨迹跟踪控制器的目标函数表示为:
42、
43、式中:ξ(k)为包含k的状态空间表达式,δu(k)为控制时域内控制增量,ηr为趋近律中的固定的因子表达形式;q和r分别表示输出权重矩阵和控制增量矩阵;ρ为松弛因子权重;ε为松弛因子,且大于0;
44、在求出目标函数后,将其转化为二次规划求解的形式:
45、
46、式中:yref为期望横向位置;y为实际横向位置;ηref为期望因子表达形式;h为矩阵表现形式,e=yref-ψkξ-γkφ,ψ为航向角误差。
47、前述的基于差动转向的路径跟踪控制方法,所述mpc横向轨迹跟踪控制器具有约束条件,所述约束条件为输入的驱动力矩和转向角的约束,其满足:
48、
49、式中:
50、其中,tmax为为轮毂电机可以发挥的最大驱动力矩,δmax为转向系统最大转角,δtmax和δtmin为为驱动电机在每个控制周期内的驱动力变化量的最大值和最小值;tdmax为轮毂电机不受路面附着约束的最大驱动力矩,σ为安全系数,r为车轮半径;fz为轮胎垂直力;μ为路面摩擦系数。
51、前述的基于差动转向的路径跟踪控制方法,所述力矩分配是对首先对总需求驱动转矩tall进行前后轴分配,对于前后轴的载荷表示如下:
52、
53、其中,fzf和fzr分别为前轴和后轴的垂直载荷,ax为横向加速度;hcg为车辆质心高度;
54、按照前后轴载荷比,动态分配前后轴驱动力矩,得到的前后轴驱动力矩表示如下:
55、
56、车辆在转向时,在侧向加速度ay的影响下,导致车辆左右两轮会发生载荷转移,mpc横向轨迹跟踪控制器输出的前后轴左右两轮驱动力矩差通过车轮垂直载荷的比值分配,各个车轮垂直载荷定义为:
57、
58、分配差动力矩之后各轮的驱动力矩,若是前轴差动转向,则后轮的驱动力矩平均分配到后轮;前后轴差动转向的各轮的驱动力矩的公式如下:
59、
60、式中:mf和mr分别为前后轮的转向阻力矩。
61、与现有技术相比,本发明基于差动转向的实现方式,使得车辆在出现转向执行机构故障时,仍能够保持稳定的转向能力。因此,在转向执行器发生故障的情况,可以利用差动转向控制起到弥补线控转向系统的转矩不足,甚至可以在转向系统失效时能够实现完全替代原有的线控转向执行机构的作用,为分布式线控底盘的安全性、可靠性和驾驶体验提供了更好的保障。
- 还没有人留言评论。精彩留言会获得点赞!