一种非道路多轴车辆的主动悬架控制方法
:本发明属于车辆悬架,具体涉及一种多轴车辆在复杂路面行进时的主动悬架控制方法。
背景技术
0、
背景技术:
1、在非道路环境下行驶的多轴车辆,例如军用全地形车、农用无人运输车以及无人应急救援车等等,不同于城市环境,越野环境不具备结构化道路且环境中障碍物复杂多变,地形起伏较大。因此,在上述环境中行驶的车辆对于车身的高度控制、俯仰与侧倾角度的控制以及车轮载荷的优化分配等方面有着迫切的需求。由于车辆是一个复杂的非线性耦合系统,其与地面间的相互作用使得车辆在行进过程中的车身姿态被动响应与车轮载荷的分配并不理想,导致地形对车辆产生干涉,降低了车辆的通过性、机动性和稳定性。若能在复杂地形中同步完成车身姿态与车轮载荷的精确控制,使之达到理想的姿态与载荷,这对于提高车辆的通过性、机动性和稳定性具有重要意义。
2、例如,cn110901325a公开了一种主动悬架控制方法:在车辆行进过程中,利用感知组件对即将驶入的路面进行感知,建立路面三维不平度曲线;主动悬架的控制系统根据车辆当前的姿态以及感知到的前方路面信息计算悬架的补偿量;当车辆行进至前方感知路面时,主动悬架的控制系统输出悬架姿态指令,从而控制各个作动机构调整车辆姿态,使车辆适应路面的变化。该控制方法保证了车辆在不平路面行驶时良好的平顺性。但是,该方法尚未实现车身姿态和车轮载荷的同步控制,尤其是多轴车辆在复杂路面行驶时的车姿与轮荷的同步控制。
3、cn116766853a公开了一种主动悬架车辆及其控制方法:该控制方法在车辆行进的过程中,首先超前解算下一时刻车高车姿与车轮载荷的被动响应;进而确定同一时刻的车高车姿和可行轮荷期望,并逆向解算同一时刻车辆行驶到相应路面形貌特征时车辆达到所述车高车姿和可行轮荷期望需要的悬架主动调节量。值得注意的是,利用该专利中的控制方法在实际计算过程中,一方面:计算得到的车轮载荷与车身姿态并不精确,甚至车轮载荷中出现了不切实际的负值。另一方面:悬架作动量的求解依托于超前解算的车轮载荷与车身姿态,由于计算得到的车姿与轮荷不精确,所以求解的悬架作动量也是不精确的。以上两个方面的问题使得悬架系统的控制效果变差,直接导致车身姿态失调、车轮载荷分配不均。严重时某一车轮将因承受较大载荷而损坏,甚至车身发生倾覆,对车辆的通过性、机动性和稳定性产生较大影响。
4、综上所述,现有技术方法在悬架系统的主动控制精度上还存在较大不足。尤其是在地形坡度起伏较大、障碍物零散分布的复杂路面,如果悬架系统的控制精度不足,将直接导致车轮过载、车身倾覆、通过性不佳的严重后果。提高悬架系统控制精度的核心难题在于:车辆作为一个复杂的非线性耦合系统,路面的复杂变化将对其车轮载荷与车身姿态产生不同程度的耦合影响;若不能准确计算车轮载荷与车身姿态,那么在此基础上求解的悬架作动量也是不精确的,最终导致主动悬架系统的控制精度不足。
技术实现思路
0、
技术实现要素:
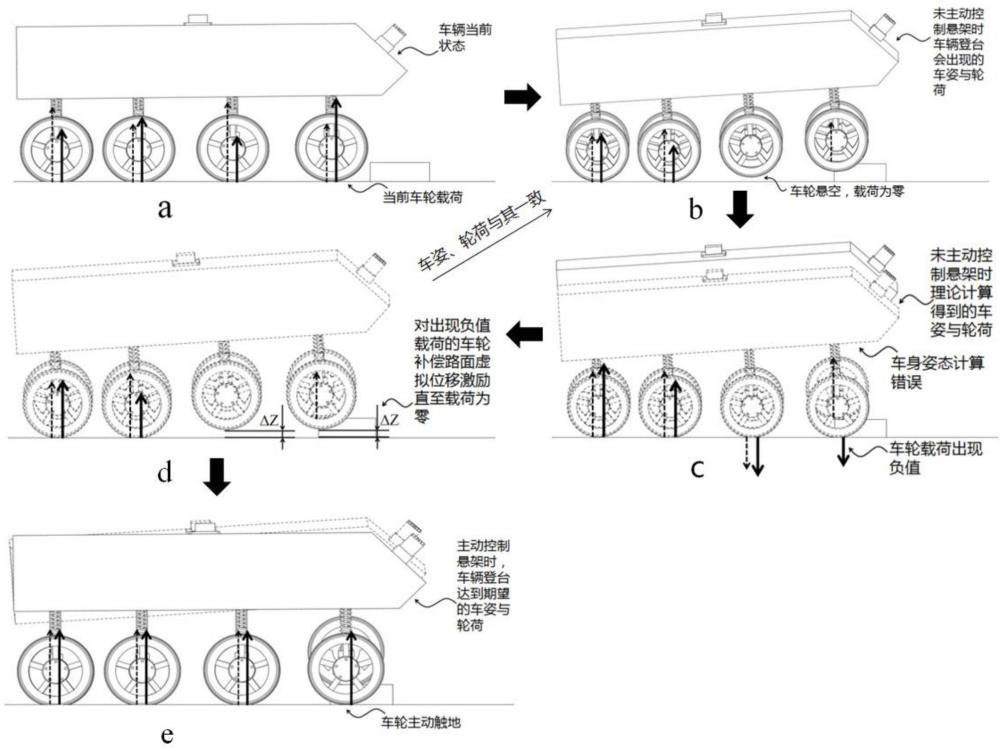
1、鉴于上述不足,本发明提出了一种非道路多轴车辆的主动悬架控制方法。该控制方法在车辆行进过程中,首先超前解算下一时刻的各个车轮载荷,对出现负值载荷的车轮分别补偿路面虚拟位移激励,直至载荷为零;然后解算所述下一时刻的车身姿态,至此实现了理论计算结果与车辆实际被动响应的一致性;进而根据载荷与姿态信息判断车辆是否存在倾覆或过载的危险,提高车辆的安全性;超前解算车辆在所述下一时刻行进至所述路面虚拟位移激励时为达到期望车姿与轮荷所需的悬架主动调节量;最后控制车辆在所述下一时刻行进至所述路面虚拟位移激励的位置并控制各个主动执行机构完成同步作动。本发明所述控制方法可以实现两个功能,一、提高超前解算的精度:多轴车辆在穿越复杂路面时,能够精确地超前解算出各个车轮的载荷及车身姿态;二、实现精确控制:在精确解算车姿与轮荷的基础上求解悬架作动量,精确控制多轴车辆达到期望的车姿与轮荷;所述控制方法具体包括以下步骤:
2、步骤1,构造承载交互作用矩阵[k]n×n:所述多轴车辆在水平良好路面上驱动第i个所述主动执行机构主动伸长并由对应的所述位移传感器实时测量,直至产生单位位移,期间保持其他所述主动执行机构不主动调节;由所述力传感器测量各个所述车轮载荷的增量,按照从1到n的次序将各个所述车轮载荷的增量依次存放入矩阵第i列的第1到n行,构造出承载交互作用矩阵[k]n×n;
3、
4、步骤2,构造变形交互作用矩阵[t]2×n:在步骤1驱动第i个所述主动执行机构产生一个单位位移的同时,测量所述车身绕所述x轴、所述y轴的倾角增量,分别放入矩阵第i列的第1到2行,构造出变形交互作用矩阵[t]2×n;
5、
6、步骤3,在当前时刻t0,测量行驶在非道路环境下所述多轴车辆的各个车轮载荷,记为各个车轮的当前载荷{fi0}n×1;同理,将测量得到的车身倾角记为当前车身倾角m=x、y,质心高度记为当前质心高度{h0}1×1;
7、
8、步骤4,在所述当前时刻t0,所述激光雷达采集第一轴车轮前方至少一倍车长纵向距离内的路面点云数据,对所述激光雷达采集到的路面点云数据进行滤波处理,提取出左右车轮前方的路面点云数据;通过点云数据拾取,得到所述当前时刻t0单位时间间隔后的下一时刻t1各个车轮将承受的路面虚拟位移激励{di}n×1;
9、步骤5,构造载荷超前解算方程,公式4:使所述承载交互作用矩阵乘以所述路面虚拟位移激励,所得结果与所述各个车轮的当前载荷相加,超前解算得到各个车轮在所述下一时刻t1理论上会承受的载荷{fi1}n×1,将{fi1}n×1称为超前解算载荷;
10、{fi1}n×1=[k]{di}+{fi0} 公式4
11、步骤6,遍历所述超前解算载荷{fi1}n×1,如果{fi1}n×1存在负值,对每个存在负值载荷的车轮分别补偿路面虚拟位移激励,每次补偿一个单位距离的路面虚拟位移激励;将补偿后的路面虚拟位移激励{d′i}n×1代入公式4,重新计算所述超前解算载荷,反复迭代直至所述超前解算载荷均为非负数;将所述补偿后的路面虚拟位移激励{d′i}n×1重新定义为路面虚拟位移激励{di}n×1并输出至下一步骤;如果{fi1}n×1不存在负值,则直接将所述路面虚拟位移激励{di}n×1输出至下一步骤;
12、步骤7,构造姿态超前解算方程,公式5:使所述变形交互作用矩阵乘以所述路面虚拟位移激励,所得结果与所述当前车身倾角相加,超前解算得到所述车身在所述下一时刻t1理论上会产生的倾角将称为超前解算倾角;使所述当前质心高度与所述路面虚拟位移激励的平均值相加,超前解算得到所述车身在所述下一时刻t1理论上会产生的质心高度h1,将h1称为超前解算质心高度;将所述超前解算倾角与所述超前解算质心高度统称为超前解算姿态;
13、
14、步骤8,设定车轮过载预警阈值、设定车身倾覆预警阈值;如果所述多轴车辆的某一个车轮载荷超过设定的所述车轮过载预警阈值或车身倾角超过设定的所述车身倾覆预警阈值则触发车轮过载或车身倾覆预警,结束主动控制;反之,则执行下一步骤;
15、步骤9,设定所述多轴车辆在所述下一时刻t1行进至所述路面虚拟位移激励时的期望车身倾角期望车轮载荷{fis}n×1、期望质心高度{hs}1×1;
16、步骤10,构造悬架主动补偿控制方程,公式6:根据步骤1、2得到的承载交互作用矩阵、变形交互作用矩阵,以列对齐的方式组合成承载与变形交互作用矩阵[k;t]t;根据步骤5、7得到的超前解算载荷、超前解算倾角,步骤9得到的期望车轮载荷、期望车身倾角,解算为达到所述期望车轮载荷与所述期望车身倾角所需的悬架主动补偿数据将称为初次补偿数据;根据步骤7得到的超前解算质心高度、所述路面虚拟位移激励的平均值,步骤9得到的期望质心高度以及所述初次补偿数据构造悬架主动补偿控制方程,式;
17、
18、步骤11,求解悬架主动补偿数据求解所述多轴车辆在所述下一时刻t1行进至所述路面虚拟位移激励时为达到期望车身倾角、期望质心高度、期望车轮载荷所需的悬架主动补偿数据
19、步骤12,控制所述多轴车辆在所述下一时刻t1行进至所述路面虚拟位移激励的位置;同时,控制各个所述主动执行机构在所述多轴车辆到达所述位置时完成同步作动,即完成单位时间间隔的主动控制,结束主动控制。
20、本发明的有益效果如下:
21、1.精确地超前解算多轴车辆在复杂路面行进时的车姿与轮荷。因为超前解算得到的车姿与轮荷足够精确,所以车辆的控制系统能够根据姿态与载荷信息准确判断车辆是否有倾覆或过载的危险,实现了车辆的危险预警功能,提高了车辆的主动安全性。
22、2.在精确地超前解算车姿与轮荷的基础上求解悬架作动量,精确控制悬架同步作动。以精确控制悬架同步作动的方式来优化多轴车辆穿越复杂路面时的车身姿态与车轮载荷。理想情况下,任意轴数车辆在到达所述路面虚拟位移激励的位置时,均能达到期望的车姿与轮荷,从而大幅提升车辆的通过性、机动性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!