一种横向移动控制方法、车辆和可读存储介质与流程
本技术涉及车辆,并且更具体地,涉及车辆中的一种横向移动控制方法、车辆和可读存储介质。
背景技术:
1、目前,为了降低车辆的使用难度,尤其是降低车辆在狭小空间内的停靠难度,一些车辆会配备横向移动功能。横向移动功能可以使用户在车辆纵向移动(前进或后退)受限时操作车辆进行横向移动,从而可以操作车辆快速驶出狭小空间。
2、相关技术中,车辆在进行横向移动时可能会存在一定的纵向偏移,纵向偏移可能会使车辆在横向移动过程中发生剐蹭,甚至可能会威胁车辆和乘车人员的安全。
技术实现思路
1、本技术提供了一种横向移动控制方法、车辆和可读存储介质,本技术能够减小车辆在横向移动过程中可能存在的纵向偏移。
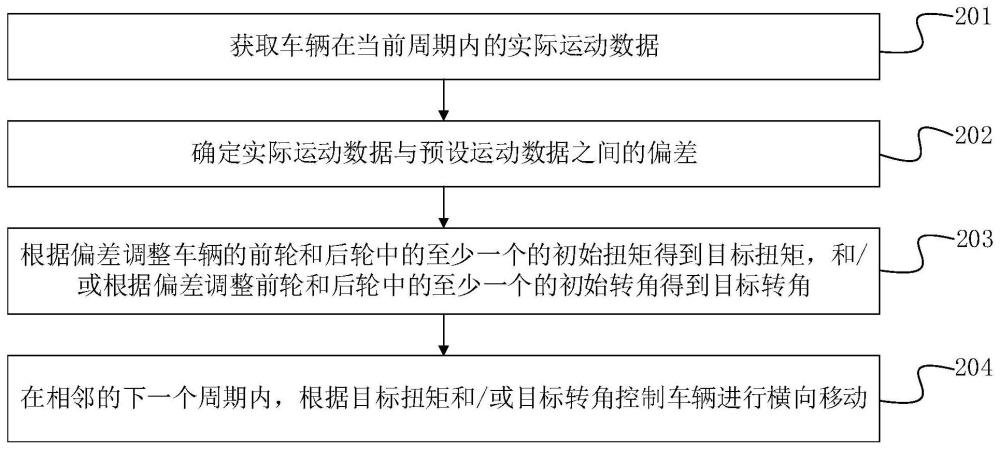
2、第一方面,提供了一种横向移动控制方法,该方法包括:获取车辆在当前周期内的实际运动数据;确定所述实际运动数据与预设运动数据之间的偏差;根据所述偏差调整所述车辆的前轮和后轮中的至少一个的初始扭矩得到目标扭矩,和/或根据所述偏差调整所述前轮和所述后轮中的至少一个的初始转角得到目标转角;在相邻的下一个周期内,根据所述目标扭矩和/或所述目标转角控制所述车辆进行横向移动。
3、本技术实施例中,在车辆横向移动过程中,根据车辆的实际运动数据,与预设运动数据之间的偏差调整车辆的前轮和后轮中的至少一个的初始扭矩得到目标扭矩,和/或调整前轮和后轮中的至少一个的初始转角得到目标转角。在相邻的下一个周期内,根据目标扭矩和/或目标转角控制车辆进行横向移动。通过车辆在横向移动过程中的实际运动数据与预设运动数据之间的偏差调整车辆的前轮和后轮中的至少一个的扭矩和/或转角,可以减小甚至消除车辆在横向移动过程中可能存在的纵向偏移,进而可以降低车辆发生剐蹭的概率,以及可以提高车辆横向移动过程中的安全性和可靠性。
4、可选地,所述实际运动数据包括所述车辆的纵向加速度和实际横摆角,以及所述前轮的前轮实际转速和所述后轮的后轮实际转速中的至少一个。
5、可选地,所述根据所述偏差调整所述车辆的前轮和后轮中的至少一个的初始扭矩得到目标扭矩,包括:根据所述偏差中包括的加速度偏差、前轮转速偏差和后轮转速偏差中的至少一个调整所述初始扭矩,得到所述目标扭矩,所述加速度偏差为所述预设运动数据中的预设加速度与所述纵向加速度之间的偏差,所述前轮转速偏差为所述预设运动数据中的前轮预设转速与所述前轮实际转速之间的偏差,所述后轮转速偏差为所述预设运动数据中的后轮预设转速与所述后轮实际转速之间的偏差。
6、本技术实施例中,由于加速度偏差可以准确表征车辆在纵向方向的运动状态,前轮转速偏差和后轮转速偏差可以准确表征车轮转速对纵向偏移的影响,因此当根据加速度偏差、前轮转速偏差和后轮转速偏差中的至少一个确定前轮和后轮中的至少一个的目标扭矩时,可以根据目标扭矩对横向偏移过程进行较为准确的控制,从而可以显著减小可能存在的纵向偏移,进而可以提高车辆横向移动过程中的安全性和可靠性。
7、可选地,所述初始扭矩包括所述前轮的前轮初始扭矩和所述后轮的后轮初始扭矩,所述目标扭矩包括所述前轮的前轮目标扭矩和所述后轮的后轮目标扭矩;所述根据所述偏差中包括的加速度偏差、前轮转速偏差和后轮转速偏差中的至少一个调整所述初始扭矩,得到所述目标扭矩,包括:在所述纵向加速度小于第一阈值的情况下,根据所述前轮转速偏差调整所述前轮初始扭矩得到所述前轮目标扭矩;以及,根据所述后轮转速偏差调整所述后轮初始扭矩得到所述后轮目标扭矩。
8、本技术实施例中,在纵向加速度小于第一阈值的情况下,直接根据前轮的转速偏差对前轮的扭矩进行调整,根据后轮的转速偏差对后轮的扭矩进行调整,可以在纵向加速度较小时简单快捷的根据转速偏差对车辆横向移动进行控制,不仅可以减小可能存在的纵向偏差,而且可以降低使前轮和后轮的转速接近预设转速,从而可以降低对车轮的磨损。
9、可选地,所述根据所述偏差中包括的加速度偏差、前轮转速偏差和后轮转速偏差中的至少一个调整所述初始扭矩,得到所述目标扭矩,包括:
10、在所述纵向加速度大于第一阈值且小于第二阈值的情况下,根据所述加速度偏差和第一转速偏差调整第一初始扭矩,得到第一车轮的第一目标扭矩,所述第一车轮为所述前轮和所述后轮各自产生的纵向牵引力中最大纵向牵引力对应的车轮,所述第一转速偏差为所述前轮转速偏差和所述后轮转速偏差中与所述第一车轮对应的转速偏差,所述第一初始扭矩为所述前轮初始扭矩和所述后轮初始扭矩中与所述第一车轮对应的初始扭矩,所述第一目标扭矩为所述前轮目标扭矩和所述后轮目标扭矩中与所述第一车轮对应的目标扭矩;
11、以及,根据第二转速偏差调整第二初始扭矩,得到第二车轮的第二目标扭矩,所述第二车轮为所述前轮和所述后轮中除所述第一车轮以外的车轮,所述第二转速偏差为所述前轮转速偏差和所述后轮转速偏差中与所述第二车轮对应的转速偏差,所述第二初始扭矩为所述前轮初始扭矩和所述后轮初始扭矩中与所述第二车轮对应的初始扭矩,所述第二目标扭矩为所述前轮目标扭矩和所述后轮目标扭矩中与所述第二车轮对应的目标扭矩。
12、本技术实施例中,在纵向加速度大于第一阈值且小于第二阈值的情况下,根据产生纵向牵引力较大的第一车轮对应的转速偏差和加速度偏差调整第一车轮的扭矩,可以结合转速偏差和加速度偏差对第一车轮的扭矩进行调整,以降低第一车轮的扭矩,从而可以减小第一车轮的扭矩可能产生的纵向偏移。
13、可选地,所述根据所述加速度偏差和第一转速偏差调整第一初始扭矩,得到第一车轮的第一目标扭矩,包括:确定所述加速度偏差对应的第一扭矩修正量;确定所述第一转速偏差对应的第二扭矩修正量;确定所述第一扭矩修正量对应的第一权重以及所述第二扭矩修正量对应的第二权重;根据所述第一权重、所述第一扭矩修正量、所述第二权重和所述第二扭矩修正量调整所述第一初始扭矩,得到所述第一目标扭矩。
14、本技术实施例中,可以基于第一车轮对应的第一权重和第二车轮对应的第二权重调整加速度偏差和转速偏差分别对应的扭矩修正量在第一目标扭矩中占比,从而可以调整加速度偏差和转速偏差对第一车轮的扭矩的影响程度,进而可以较为准确地对第一车轮的扭矩进行调整
15、可选地,所述确定所述第一扭矩修正量对应的第一权重以及所述第二扭矩修正量对应的第二权重,包括:根据所述纵向加速度、所述第一阈值和所述第二阈值,确定所述第一权重;根据所述第一权重确定所述第二权重。
16、本技术实施例中,结合纵向加速度的大小确定加速度偏差和转速偏差分别对应的扭矩修正量在第一目标扭矩中的占比,这样可以使加速度偏差对应的扭矩修正量与纵向加速度的大小匹配,从而可以较为准确地根据加速度偏差对第一车轮的扭矩的进行调整。
17、可选地,所述确定所述加速度偏差对应的第一扭矩修正量,包括:基于所述加速度偏差,通过所述第一车轮对应的pid控制器确定所述第一扭矩修正量。
18、本技术实施例中,针对前轮和后轮分别设置对应的pid控制器,可以分别针对前轮和后轮对应的pid控制器设定不同的比例系数、积分系数和微分系数,这样可以根据前轮对应的pid控制器确定与前轮匹配的扭矩修正量,以及根据后轮对应的pid控制器确定与后轮匹配的扭矩修正量,从而可以实现对前轮扭矩和后轮扭矩的准确调整。
19、可选地,所述根据所述偏差中包括的加速度偏差、前轮转速偏差和后轮转速偏差中的至少一个调整所述初始扭矩,得到所述目标扭矩,包括:在所述纵向加速度大于第二阈值的情况下,根据所述加速度偏差调整第一车轮的第一初始扭矩,得到所述第一车轮的第一目标扭矩,所述第一车轮为所述前轮和所述后轮各自产生的纵向牵引力中最大纵向牵引力对应的车轮,所述第一初始扭矩为所述前轮初始扭矩和所述后轮初始扭矩中与所述第一车轮对应的初始扭矩,所述第一目标扭矩为所述前轮目标扭矩和所述后轮目标扭矩中与所述第一车轮对应的目标扭矩;以及,根据第二转速偏差调整第二车轮的第二初始扭矩得到第二目标扭矩,第二车轮为所述前轮和所述后轮中除所述第一车轮以外的车轮,所述第二转速偏差为所述前轮转速偏差和所述后轮转速偏差中与所述第二车轮对应的转速偏差,所述第二初始扭矩为所述前轮初始扭矩和所述后轮初始扭矩中与所述第二车轮对应的初始扭矩,所述第二目标扭矩为所述前轮目标扭矩和所述后轮目标扭矩中与所述第二车轮对应的目标扭矩。
20、本技术实施例中,在纵向加速度大于或等于第二阈值的情况下,根据加速度偏差调整第一初始扭矩得到第一目标扭矩,并根据第二转速偏差调整第二初始扭矩得到第二目标扭矩,这样在纵向加速度较大时,针对产生较大纵向牵引力的第一车轮,可以直接通过加速度偏差调整第一车轮的扭矩,从而可以提高响应速度,快速减小横向移动过程中的纵向偏差。
21、可选地,所述方法还包括:在所述纵向加速度大于或等于第三阈值的情况下控制所述车辆结束横向移动。
22、本技术实施例中,在纵向加速度大于或等于第三阈值时及时控制车辆停止横向移动,可以使车辆在纵向偏移较大时及时停止横向移动,这样可以降低可能发生的剐蹭和损伤风险。
23、可选地,所述预设运动数据包括预设横摆角,所述目标转角包括所述前轮的前轮目标转角和所述后轮的后轮目标转角;所述根据所述偏差调整所述前轮和后轮中的至少一个的初始转角得到目标转角,包括:根据所述实际横摆角与所述预设横摆角之间的横摆角偏差调整所述前轮的前轮初始转角,得到所述前轮目标转角;和/或,根据所述横摆角偏差调整所述后轮的后轮初始转角,得到所述后轮目标转角。
24、本技术实施例中,根据车辆在横向移动过程中的横摆角偏差对前轮和/或后轮的转角进行调整,可以在车辆绕垂向方向转动时及时调整车轮转角,以降低由于车身转动引起的纵向偏移。
25、第二方面,提供了一种车辆控制的装置,该装置包括:
26、获取模块,用于获取车辆在当前周期内的实际运动数据;
27、确定模块,用于确定所述实际运动数据与预设运动数据之间的偏差;
28、调整模块,用于根据所述偏差调整所述车辆的前轮和后轮中的至少一个的初始扭矩得到目标扭矩,和/或根据所述偏差调整所述前轮和所述后轮中的至少一个的初始转角得到目标转角;
29、控制模块,在相邻的下一个周期内,根据所述目标扭矩和/或所述目标转角控制所述车辆进行横向移动。
30、第三方面,提供一种车辆,包括存储器,用于存储可执行程序代码;处理器,用于从所述存储器中调用并运行所述可执行程序代码,使得所述车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
31、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
32、第五方面,提供了一种可读存储介质,该可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!