车辆轨迹的预测与危险目标的选择方法、介质及设备与流程
本申请属于智能驾驶,特别是涉及车辆轨迹预测及危险目标的选择。
背景技术:
1、随着智能驾驶系统技术的快速发展,市场对智能驾驶工作场景的要求越来越多,对系统稳定性的要求也越来越大。目前具有辅助驾驶功能的车辆一般搭载有摄像头,毫米波雷达,超声波雷达,激光雷达等传感器。这些传感器的信号通常经过感知融合算法处理后,输出十几个甚至几十个融合目标的运动信息,而对于本车而言,往往需要从中筛选出本车运动轨迹内的最危险目标,以及左右旁侧的次危险目标。本车的行驶轨迹预测以及前方危险和次危险目标的选择,直接关系着碰撞预警系统(fcw)、自适应巡航系统(acc)、制动紧急制动系统(aeb)等辅助驾驶功能。
2、常用的目标选择方法一般会采用车道线的相关信息来选择本车运动轨迹内的危险目标,该方法采用高阶多项式的方式预测本车行驶轨迹,具有误差小的特点。但是当车道线不清晰、前方目标距离较近导致车道线信息误差变大,以及没有车道线(过十字路口)、本车转弯等情况下,容易出现危险目标丢失或者选择错误的情况。
3、此外,在弯道情况下,感知融合输出的目标横纵向距离实际上为目标径向距离在本车坐标系下的分解。因此,在使用车道线多次方程信息来预测本车行驶轨迹、选择危险目标时,需要将弯道下的目标横纵向距离做补偿,而现有的技术方案中大都未提及或未使用该方法,因此车辆在弯道场景下的适应性不强。
技术实现思路
1、本申请提供一种车辆轨迹的预测与危险目标的选择方法、介质及设备,用于解决车辆在复杂场景下轨迹预测和目标选择的技术问题。
2、第一方面,本申请实施例提供一种车辆轨迹的预测与危险目标的选择方法,包括:在车道线参考线方程可用时,基于车道线构建本车与目标车辆之间的第一横向间距;在车道线参考线方程不可时,基于车辆行驶曲率构建本车与目标车辆之间的第二横向间距;将所述第一横向间距和所述第二横向间距进行融合,获得融合横向间距;基于所述融合横向间距和预先配置的本车道与左右车道的目标横向阈值,筛选出前方不同车道距离最近的危险目标车辆。
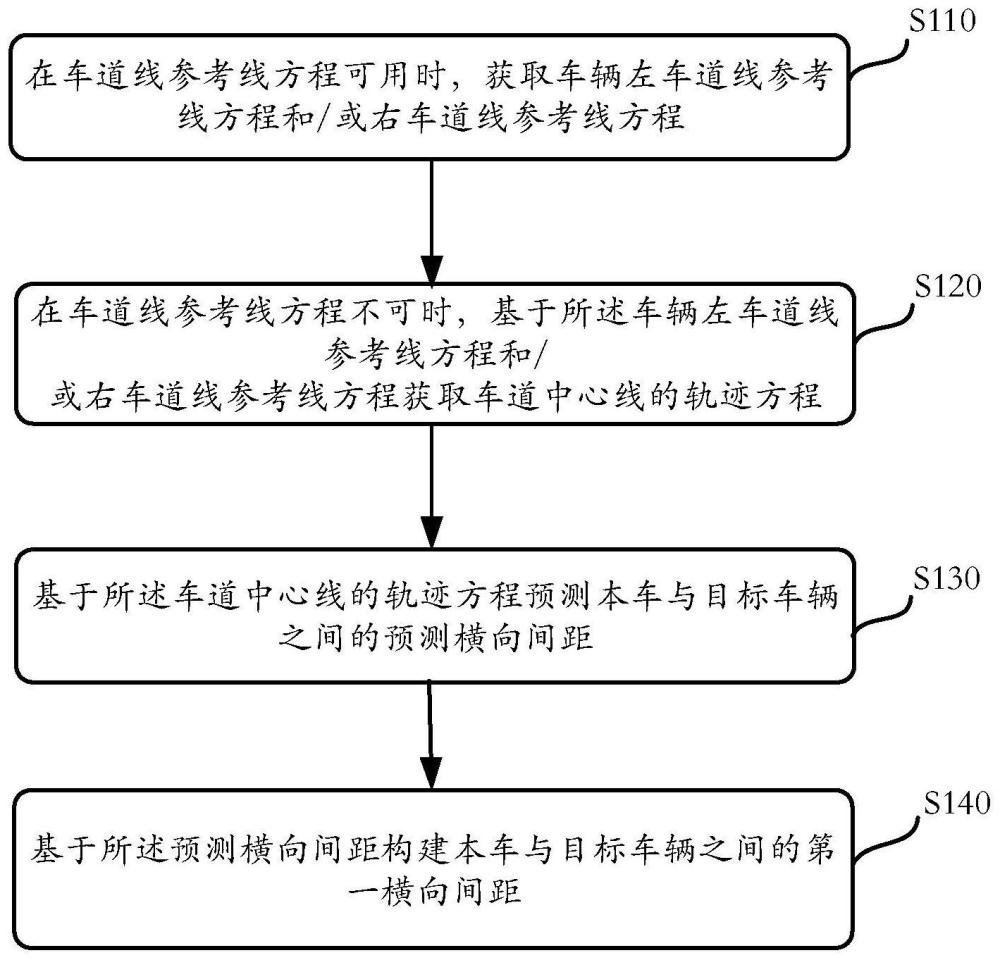
3、在所述第一方面的一种实现方式中,所述在车道线参考线方程可用时,基于车道线构建本车与目标车辆之间的第一横向间距包括:获取车辆左车道线参考线方程和/或右车道线参考线方程;基于所述车辆左车道线参考线方程和/或右车道线参考线方程获取车道中心线的轨迹方程;基于所述车道中心线的轨迹方程预测本车与目标车辆之间的第一横向间距。
4、在所述第一方面的一种实现方式中,所述基于所述车辆左车道线参考线方程和/或右车道线参考线方程获取车道中心线的轨迹方程包括:基于所述车辆左车道线参考线方程和/或右车道线参考线方程获取车道中心线的夹角,车道中心线的曲率,以及车道中心线曲率的变化率;基于所述本车与车道中心线的夹角、所述车道中心线的曲率、以及所述车道中心线曲率的变化率获取车道中心线的轨迹方程;所述基于所述车道中心线的轨迹方程预测本车与目标车辆之间的第一横向间距包括:从所述车道中心线的轨迹方程中提取所述本车与车道中心线的夹角、所述车道中心线的曲率、以及所述车道中心线曲率的变化率;获取由感知融合输出的本车与目标的相对横向距离与本车与目标的相对纵向距离;基于所述本车与目标的相对横向距离、所述本车与目标的相对纵向距离、所述本车与车道中心线的夹角、所述车道中心线的曲率、以及所述车道中心线曲率的变化率获取所述第一横向间距。
5、在所述第一方面的一种实现方式中,所述基于所述本车与目标的相对横向距离、所述本车与目标的相对纵向距离、所述本车与车道中心线的夹角、所述车道中心线的曲率、以及所述车道中心线曲率的变化率获取所述第一横向间距包括:
6、δy=dy-(c1*dx+c2*dx2+c3*dx3);
7、其中,δy为第一横向间距,dy为感知融合输出的本车与目标的相对横向距离,dx为感知融合输出的本车与目标的相对纵向距离;c1为本车与车道中心线的夹角,c2为车道中心线的曲率,c3为车道中心线曲率的变化率。
8、在所述第一方面的一种实现方式中,还包括:在车道为弯道时,对所述第一横向间距进行弯道补偿,所述弯道补偿包括:
9、
10、其中,δy1为弯道补偿后的第一横向间距,θ为车道的圆心角。
11、在所述第一方面的一种实现方式中,所述车辆行驶曲率的获取方式包括:通过多种行驶曲率计算方式,分别根据一车辆的各曲率计算参数的不同组合计算得到多个初步行驶曲率结果;各曲率计算参数至少包括:方向盘转角信息、横摆角速度信息、横向加速度信息及车速信息;所述多种行驶曲率计算方式至少包括:第一行驶曲率计算方式,用于根据方向盘转角信息计算第一初步行驶曲率结果;第二行驶曲率计算方式,用于根据横摆角速度信息和车速信息计算第二初步行驶曲率结果;第三行驶曲率计算方式,用于根据横向加速度信息和车速信息计算第三初步行驶曲率结果;根据各所述初步行驶曲率结果的加权融合计算,得到最终的车辆行驶曲率。
12、在所述第一方面的一种实现方式中,所述基于车辆行驶曲率构建本车与目标车辆之间的第二横向间距包括:
13、
14、其中,δy2为第二横向间距。
15、在所述第一方面的一种实现方式中,还包括:获取感知融合输出的实时横向间距;将所述实时横向间距、所述第一横向间距和所述第二横向间距进行融合,获得所述融合横向间距。
16、在所述第一方面的一种实现方式中,配置的所述目标横向阈值与前方目标车辆的纵向距离成正比例关系。
17、第二方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本申请第一方面中任一项所述的车辆轨迹的预测与危险目标的选择方法。
18、第三方面,本申请实施例提供一种电子设备,所述电子设备包括处理器及存储器;所述存储器存储有程序指令;所述处理器,用于运行所述程序指令,以执行本申请第一方面中任一项所述的车辆轨迹的预测与危险目标的选择方法。
19、本申请实施例提供的车辆轨迹的预测与危险目标的选择方法,具有以下有益效果:
20、本申请结合了车道线信息以及车辆行驶曲率融合估算本车与目标对象之间的横向间距,并且在估算时增加了弯道补偿算法,提高了场景适应性,有效解决车辆在复杂场景下轨迹预测和目标选择的技术问题。
技术特征:
1.一种车辆轨迹的预测与危险目标的选择方法,其特征在于,包括:
2.根据权利要求1所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,所述在车道线参考线方程可用时,基于车道线构建本车与目标车辆之间的第一横向间距包括:
3.根据权利要求2所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,所述基于所述车辆左车道线参考线方程和/或右车道线参考线方程获取车道中心线的轨迹方程包括:
4.根据权利要求3所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,所述基于所述本车与目标的相对横向距离、所述本车与目标的相对纵向距离、所述本车与车道中心线的夹角、所述车道中心线的曲率、以及所述车道中心线曲率的变化率获取所述第一横向间距包括:
5.根据权利要求1至4任一权利要求所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,还包括:在车道为弯道时,对所述第一横向间距进行弯道补偿,所述弯道补偿包括:
6.根据权利要求1所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,所述车辆行驶曲率的获取方式包括:
7.根据权利要求6所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,所述基于车辆行驶曲率构建本车与目标车辆之间的第二横向间距包括:
8.根据权利要求1所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,还包括:
9.根据权利要求1所述的车辆轨迹的预测与危险目标的选择方法,其特征在于,配置的所述目标横向阈值与前方目标车辆的纵向距离成正比例关系。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至9中任一项所述的车辆轨迹的预测与危险目标的选择方法。
11.一种电子设备,其特征在于,所述电子设备包括:
技术总结
本申请提供一种车辆轨迹的预测与危险目标的选择方法、介质及设备。所述方法包括:包括:在车道线参考线方程可用时,基于车道线构建本车与目标车辆之间的第一横向间距;在车道线参考线方程不可用时,基于车辆行驶曲率构建本车与目标车辆之间的第二横向间距;将所述第一横向间距和所述第二横向间距进行融合,获得融合横向间距;基于所述融合横向间距配置本车道与左右车道的目标横向阈值,以筛选出前方不同车道距离最近的危险目标车辆。本申请结合了车道线信息以及车辆行驶曲率融合估算本车与目标对象之间的横向间距,并且在估算时增加了弯道补偿算法,提高了场景适应性,有效解决车辆在复杂场景下轨迹预测和目标选择的技术问题。
技术研发人员:卢星星,毕来业,蒋鑫
受保护的技术使用者:上海保隆领目汽车科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!