一种控制方法、装置及第一车辆与流程
本申请涉及交通控制,特别涉及一种控制方法、装置及第一车辆。
背景技术:
1、在较为狭窄的道路发生车辆汇车时,往往需要驾驶员不断人为调整车身姿态、甚至需要与对方车辆不断沟通才能完成汇车,汇车过程并不顺利,影响汇车效率。
技术实现思路
1、本申请提供如下技术方案:
2、本申请一方面提供一种控制方法,包括:
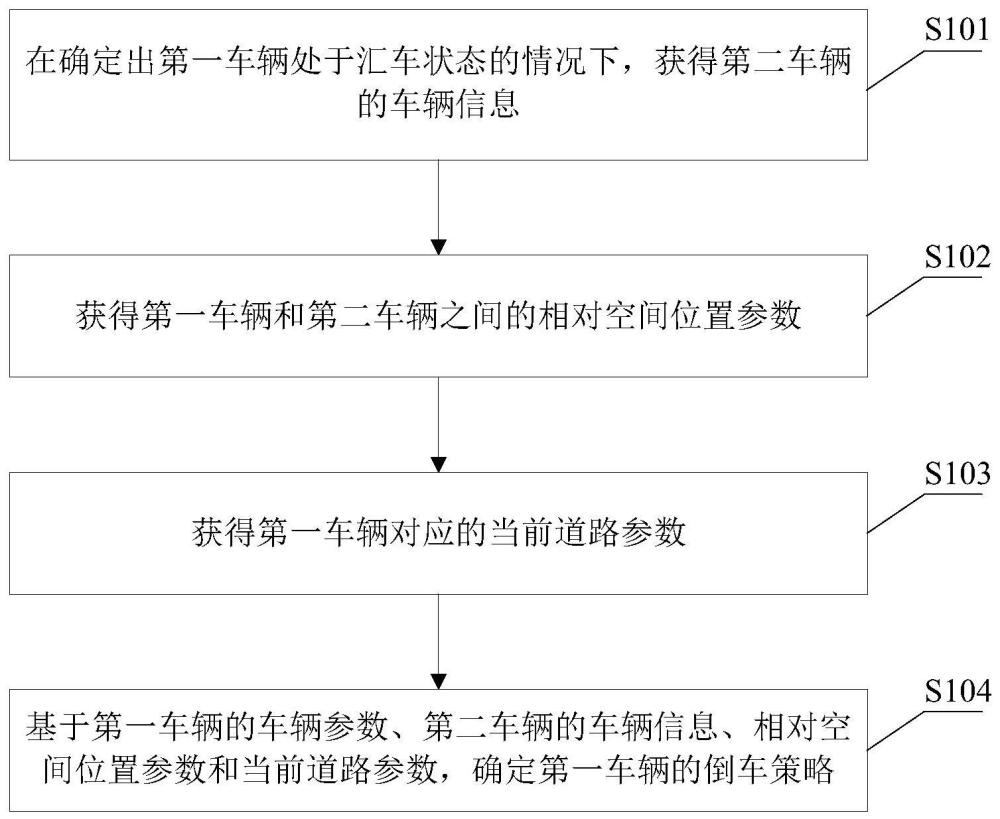
3、在确定出第一车辆处于汇车状态的情况下,获得第二车辆的车辆信息;
4、获得所述第一车辆和所述第二车辆之间的相对空间位置参数;
5、获得所述第一车辆对应的当前道路参数;
6、基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,所述倒车策略用于控制所述第一车辆避让所述第二车辆。
7、获得第二车辆的车辆信息,包括以下至少之一:
8、获得第二车辆的第一图像;基于所述第二车辆的第一图像,获得所述第二车辆的尺寸参数和形状参数中至少一种;
9、或,获得所述第二车辆传输过来的第二车辆路径规划信息。
10、获得所述第一车辆和所述第二车辆之间的相对空间位置参数,包括:
11、获得所述第二车辆的第二图像;
12、获得所述第一车辆对应的第一空间位置参数,所述第一空间位置参数用于表征所述第一车辆和所述第二车辆之间的距离关系和所述第一车辆和路面之间的位置关系中至少一种;
13、基于所述第二图像和所述第一空间位置参数,确定所述第一车辆和所述第二车辆之间的相对空间位置参数。
14、获得所述第一车辆对应的当前道路参数,包括:
15、获得所述第一车辆对应的第一当前道路图像;
16、基于所述第一当前道路图像,确定当前道路的三维模型,所述当前道路的三维模型包含所述第一车辆对应的当前道路宽度参数、当前道路坡度参数和当前道路路况参数中至少一种。
17、所述第二车辆的车辆信息包括所述第二车辆的尺寸参数和形状参数中至少一种,基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,包括:
18、基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定第一路线,所述第一路线表征所述第二车辆的可通过路线;
19、根据所述第一路线确定所述第一车辆的倒车策略。
20、所述第二车辆的车辆信息包括所述第二车辆传输过来的第二车辆路径规划信息,所述基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,包括:
21、基于所述第二车辆路径规划信息、所述相对空间位置参数和所述当前道路参数,确定至少一个可选倒车策略;
22、基于所述第一车辆的车辆参数从所述至少一个可选倒车策略中确定所述第一车辆的倒车策略。
23、所述控制方法还包括:
24、基于所述倒车策略更新所述相对空间位置参数和所述当前道路参数,得到更新后的相对空间位置参数和更新后的当前道路参数;
25、确定出所述更新后的相对空间位置参数和所述更新后的当前道路参数满足设定条件,使所述第一车辆停止倒车。
26、基于所述倒车策略更新所述相对空间位置参数和所述当前道路参数,包括:
27、获得在所述第一车辆处于倒车位置点的情况下,所述第二车辆的第三图像和所述第一车辆对应的第二空间位置参数,所述倒车位置点为所述第一车辆按照所述倒车策略倒车所到达的位置点;
28、基于所述第三图像和所述第二空间位置参数更新所述相对空间位置参数;
29、获得在所述第一车辆处于倒车位置点的情况下所述第一车辆对应的第二当前道路图像,基于所述第二当前道路图像更新所述当前道路参数。
30、本申请另一方面提供一种控制装置,包括:
31、第一获得模块,用于在确定出第一车辆处于汇车状态的情况下,获得第二车辆的车辆信息;
32、第二获得模块,用于获得所述第一车辆和所述第二车辆之间的相对空间位置参数;
33、第三获得模块,用于获得所述第一车辆对应的当前道路参数;
34、第一确定模块,用于基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,所述倒车策略用于控制所述第一车辆避让所述第二车辆。
35、本申请第三方面提供一种第一车辆,包括:
36、车辆本体;
37、控制装置,包括第一获得模块,用于在确定出所述第一车辆处于汇车状态的情况下,获得第二车辆的车辆信息,第二获得模块,用于获得所述第一车辆和所述第二车辆之间的相对空间位置参数,第三获得模块,用于获得所述第一车辆对应的当前道路参数,第一确定模块,用于基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略;
38、驱动装置,用于根据所述倒车策略控制所述第一车辆避让所述第二车辆。
技术特征:
1.一种控制方法,包括:
2.根据权利要求1所述的控制方法,获得第二车辆的车辆信息,包括以下至少之一:
3.根据权利要求1所述的控制方法,获得所述第一车辆和所述第二车辆之间的相对空间位置参数,包括:
4.根据权利要求1所述的控制方法,获得所述第一车辆对应的当前道路参数,包括:
5.根据权利要求2所述的控制方法,所述第二车辆的车辆信息包括所述第二车辆的尺寸参数和形状参数中至少一种,基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,包括:
6.根据权利要求2所述的控制方法,所述第二车辆的车辆信息包括所述第二车辆传输过来的第二车辆路径规划信息,所述基于所述第一车辆的车辆参数、所述第二车辆的车辆信息、所述相对空间位置参数和所述当前道路参数,确定所述第一车辆的倒车策略,包括:
7.根据权利要求1所述的控制方法,所述控制方法还包括:
8.根据权利要求7所述的控制方法,基于所述倒车策略更新所述相对空间位置参数和所述当前道路参数,包括:
9.一种控制装置,包括:
10.一种第一车辆,包括:
技术总结
本申请提供了一种控制方法、装置及第一车辆,该控制方法包括:在确定出第一车辆处于汇车状态的情况下,获得第二车辆的车辆信息;获得第一车辆和第二车辆之间的相对空间位置参数;获得第一车辆对应的当前道路参数;基于第一车辆的车辆参数、第二车辆的车辆信息、相对空间位置参数和当前道路参数,确定第一车辆的倒车策略,倒车策略用于控制第一车辆避让第二车辆。
技术研发人员:李涛,张晓平,唐宇
受保护的技术使用者:联想(北京)有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!