一种用于巡检机器人失控时的自动紧急制动装置和方法与流程
本发明涉及机器人,具体涉及一种用于巡检机器人失控时的自动紧急制动装置和方法。
背景技术:
1、随着机器人技术的不断发展,机器人在各个领域的应用越来越广泛。然而,在机器人运行过程中,由于轮毂电机可能会失效滑行或其他原因,机器人可能会遇到障碍物,导致机器人与障碍物发生碰撞,造成机器人损坏或人员伤亡。因此,如何避免机器人与障碍物的碰撞是机器人技术领域的一个重要问题。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种有效防止机器人与障碍物发生碰撞的用于巡检机器人失控时的自动紧急制动装置和方法。
2、本发明克服其技术问题所采用的技术方案是:
3、一种用于巡检机器人失控时的自动紧急制动装置,包括:
4、底盘,其下端四个边角处分别安装有悬架系统,每个悬架系统上安装有动力轮;
5、障碍物检测系统,设置于底盘上用于检测机器人与障碍物之间的距离;
6、制动轮系统,设置于底盘的下端,制动轮系统包括轮架、通过轮轴转动安装于轮架下端的制动轮、用于驱动轮架相对底盘上下移动的纵移机构以及用于阻止制动轮转动的阻转装置,当纵移机构驱动轮架移动至最下端时,制动轮的下端与地面接触。
7、进一步的,上述动力轮包括安装于悬架系统外侧端的轮毂电机以及安装于轮廓电机的外圈安装有轮胎。
8、进一步的,上述障碍物检测系统包括分别安装于底盘前后两端的激光雷达。
9、优选的,底盘下端设置有3个制动轮系统,其中2个制动轮系统分别设置于底盘下端的前后两侧,1个制动轮系统设置于底盘下端的中心位置。
10、进一步的,上述纵移机构包括安装于底盘下端的油缸,油缸的轴线沿竖直方向设置,油缸的活塞杆与轮架的上端相连接。
11、进一步的,上述阻转装置包括安装于轮架下端的耳座、呈v字形的摆臂以及驱动臂,摆臂的中间部位通过销轴ⅱ铰接连接于耳座上,其前端通过销轴ⅰ与驱动臂铰接连接,其后端安装有刹车片,所述轮架上安装有用于使驱动臂上下移动的动力单元,当驱动臂向上运动时,摆臂摆动至刹车片与轮胎外表面相接触。
12、进一步的,上述动力单元包括安装于轮架上的电机以及与电机的输出轴同轴传动连接的丝杠,丝杠的轴线沿竖直方向设置,丝杠与驱动臂螺纹传动连接。
13、为了提高摩擦力,上述刹车片的内端面为圆弧形,圆弧形的内端面的弧度与轮胎的弧度相匹配。
14、一种用于巡检机器人失控时的自动紧急制动方法,包括:
15、在机器人的底盘上设置控制器;
16、控制器控制轮毂电机转动使驱动底盘行走;
17、障碍物检测系统检测机器人行走方向上是否有障碍物,当有障碍物时,障碍物检测系统将机器人与障碍物之间的距离发送至控制器;
18、当控制器判断需要刹车时,控制器向纵移机构下发指令,纵移机构驱动制动轮向下移动至与地面接触后控制器向阻转装置下发指令,阻转装置阻止制动轮转动,完成底盘的刹车。
19、上述障碍物检测系统为安装于底盘上的红外传感器或超声波传感器或激光雷达。
20、本发明的有益效果是:底盘行走时,障碍物检测系统检测机器人行进方向上障碍物与机器人之间的距离,当距离过近需要制动时,纵移机构驱动制动轮下移使制动轮与地面接触后阻转装置动作对制动轮产生阻力,从而使底盘制动,实现在机器人遇到障碍物时自动进行紧急制动,以保护机器人和周围环境的安全。制动装置是一套独立的制动系统,没有其他部分的干扰。机器人可以自动完成制动,无需人工干扰。
技术特征:
1.一种用于巡检机器人失控时的自动紧急制动装置,其特征在于,包括:
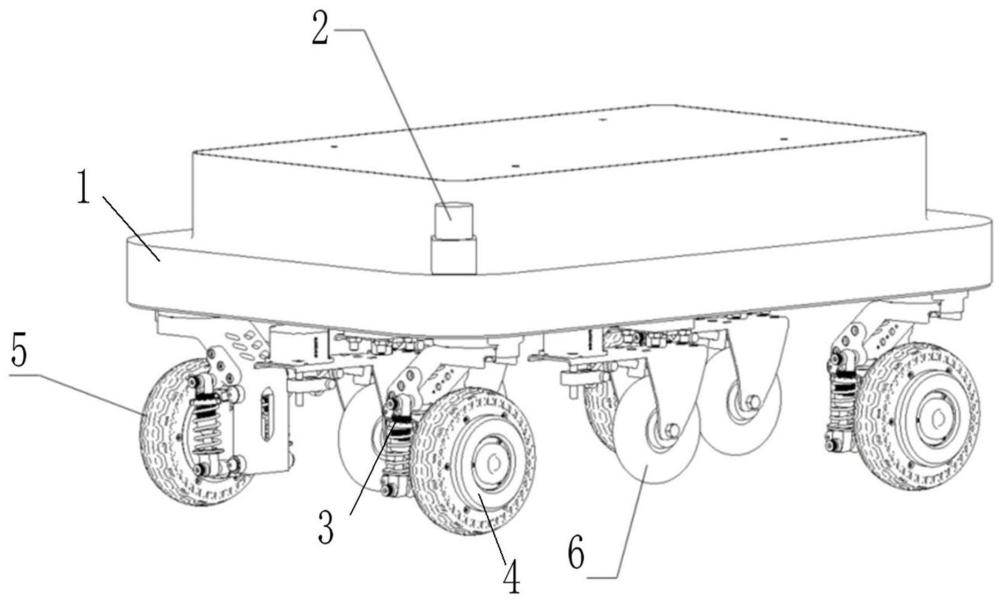
2.根据权利要求1所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述动力轮包括安装于悬架系统(3)外侧端的轮毂电机(4)以及安装于轮廓电机(4)的外圈安装有轮胎(5)。
3.根据权利要求1所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述障碍物检测系统包括分别安装于底盘(1)前后两端的激光雷达(2)。
4.根据权利要求1所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:底盘(1)下端设置有3个制动轮系统,其中2个制动轮系统分别设置于底盘(1)下端的前后两侧,1个制动轮系统设置于底盘(1)下端的中心位置。
5.根据权利要求1所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述纵移机构包括安装于底盘(1)下端的油缸(8),油缸(8)的轴线沿竖直方向设置,油缸(8)的活塞杆与轮架(9)的上端相连接。
6.根据权利要求1所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述阻转装置包括安装于轮架(9)下端的耳座(18)、呈v字形的摆臂(12)以及驱动臂(13),摆臂(12)的中间部位通过销轴ⅱ(16)铰接连接于耳座(18)上,其前端通过销轴ⅰ(14)与驱动臂(13)铰接连接,其后端安装有刹车片(15),所述轮架(9)上安装有用于使驱动臂(13)上下移动的动力单元,当驱动臂(13)向上运动时,摆臂(12)摆动至刹车片(15)与轮胎(6)外表面相接触。
7.根据权利要求6所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述动力单元包括安装于轮架(9)上的电机(11)以及与电机(11)的输出轴同轴传动连接的丝杠(17),丝杠(17)的轴线沿竖直方向设置,丝杠(17)与驱动臂(13)螺纹传动连接。
8.根据权利要求6所述的用于巡检机器人失控时的自动紧急制动装置,其特征在于:所述刹车片(15)的内端面为圆弧形,圆弧形的内端面的弧度与轮胎(5)的弧度相匹配。
9.一种使用权利要求1至8中任意一项用于巡检机器人失控时的自动紧急制动装置进行制动的方法,其特征在于,包括:
10.根据权利要求9所述的用于巡检机器人失控时的自动紧急制动方法,其特征在于:所述障碍物检测系统为安装于底盘(1)上的红外传感器或超声波传感器或激光雷达。
技术总结
一种用于巡检机器人失控时的自动紧急制动装置和方法,涉及机器人技术领域,底盘行走时,障碍物检测系统检测机器人行进方向上障碍物与机器人之间的距离,当距离过近需要制动时,纵移机构驱动制动轮下移使制动轮与地面接触后阻转装置动作对制动轮产生阻力,从而使底盘制动,实现在机器人遇到障碍物时自动进行紧急制动,以保护机器人和周围环境的安全。制动装置是一套独立的制动系统,没有其他部分的干扰。机器人可以自动完成制动,无需人工干扰。
技术研发人员:牛德奎,宋明明
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!