用于控制车辆驶过交叉路口的方法和系统与流程
本发明涉及自动驾驶领域,尤其是涉及一种用于控制车辆驶过交叉路口的方法,一种用于控制车辆驶过交叉路口的系统,一种包括根据本发明的系统的车辆,以及一种计算机程序产品,其用于至少辅助地实现根据本发明所述的方法的步骤。
背景技术:
1、在城市道路中存在大量的交叉路口,其由各种类型的道路交错而产生。如图2中所示的交通场景图,自动驾驶车辆1在行驶通过这些交叉路口后经常会遇到要驶入的行车道3是弯道、而不是直道的状况,这导致自动驾驶车辆1需要执行变向操作才在驶入行车道3后继续行驶。然而,尤其是在车流量较大的情况下,在交叉路口执行变向操作时,如果周围车辆在其行车道上直行行驶,则极容易与相邻行车道的周围车辆发生碰撞事故。
2、因此,如何提高自动驾驶车辆在城市交叉路口的行车安全性成为目前需要解决的技术难题。
技术实现思路
1、本发明的目的在于提供一种用于控制车辆驶过交叉路口的方法,一种用于控制车辆驶过交叉路口的系统,一种包括根据本发明的系统的车辆,以及一种计算机程序产品,以至少部分地解决现有技术中的问题。
2、根据本发明的第一方面,提供了一种用于控制车辆驶过交叉路口的方法,所述方法包括:
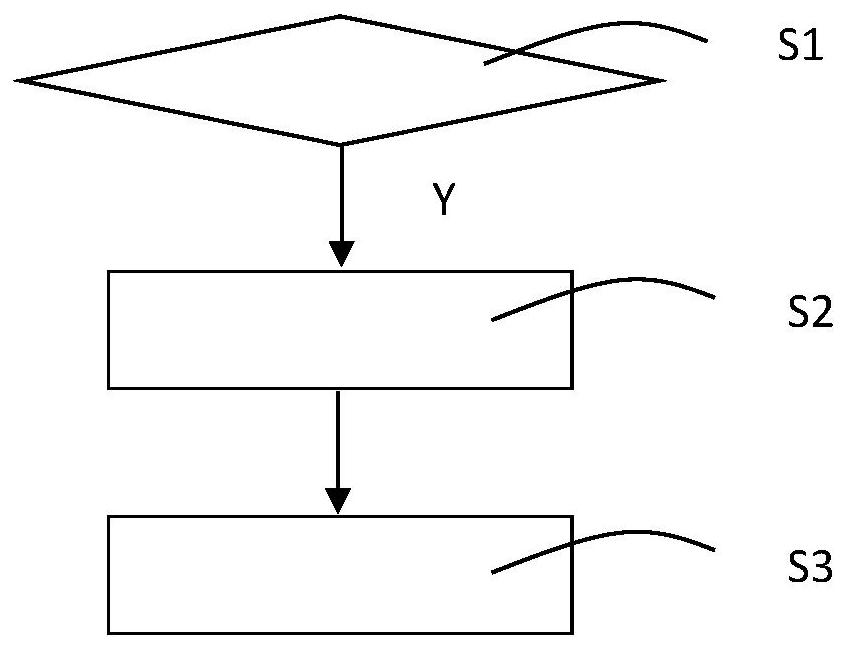
3、-步骤s1:在本车辆行驶靠近交叉路口的情况下,通过本车辆探测到的周围行车环境信息判断本车辆行驶通过交叉路口后要驶入的行车道是否是弯道;
4、-步骤s2:如果本车辆行驶通过交叉路口后要驶入的行车道是弯道,则将从所述周围行车环境信息中获取的周围车辆的运动特征信息与通过车对车通信接收到的周围车辆的运动特征信息进行融合;和
5、-步骤s3:至少基于所述周围车辆的经融合的运动特征信息,控制本车辆行驶通过所述交叉路口。
6、本发明的核心构思在于:在本车辆行驶通过交叉路口后要驶入的弯道行车道的情况下,基于周围车辆的经融合的运动特征信息控制本车辆提前进行转向和加减速,使得本车辆处于周围车辆的驾驶员的视野范围内,从而可以尽可能地避免在换向过程中与周围车辆发生碰撞事故。
7、根据本发明的一个可选实施例,所述运动特征信息例如包括所述周围车辆的当前位置信息、行驶速度方向、行驶速度值、和/或行驶速度变化值等。
8、根据本发明的另一可选实施例,可以至少基于所述周围车辆的经融合的运动特征信息控制本车辆的行驶速度和行驶方向,使得本车辆处于所述周围车辆的驾驶员的视野范围内。
9、根据本发明的另一可选实施例,所述方法还可以包括:
10、-步骤s41:基于本车辆的运动特征信息和所述周围车辆的经融合的运动特征信息,评估本车辆与所述周围车辆发生碰撞的概率是否高于预设概率阈值;和
11、-步骤s42:如果本车辆与所述周围车辆发生碰撞的概率高于预设概率阈值,则至少基于所述周围车辆的经融合的运动特征信息调整本车辆的行驶速度和行驶方向,以降低本车辆与所述周围车辆发生碰撞的概率。
12、根据本发明的另一可选实施例,在控制本车辆行驶通过所述交叉路口的过程中可以提高本车辆的行驶速度,使得本车辆处于在本车辆后方行驶或与本车辆并排行驶的第一周围车辆的驾驶员的前向视野的可视范围内。
13、根据本发明的另一可选实施例,在控制本车辆行驶通过所述交叉路口的过程中可以降低本车辆的行驶速度,使得本车辆处于在本车辆前方行驶的第二周围车辆的后向视野的可视范围内。
14、根据本发明的另一可选实施例,所述方法还可以包括:
15、-步骤s43:在本车辆与所述周围车辆发生碰撞的概率高于预设概率阈值的情况下,向本车辆的驾驶员发送相应的通知信息。
16、根据本发明的第二方面,提供了一种用于控制车辆驶过交叉路口的系统,其中,所述系统可以包括以下构件:
17、-探测模块,其被配置用于探测本车辆的周围行车环境信息;
18、-车载通信模块,其被配置用于通过车对车通信接收周围车辆的运动特征信息;和
19、-控制模块,其被配置用于执行根据本发明的方法。
20、根据本发明的另一可选实施例,所述系统还可以包括车载导航模块,其被配置用于获取本车辆的当前位置信息和行驶速度信息,并且在所述车载导航模块中存储有地图信息。
21、根据本发明的另一可选实施例,所述系统还可以包括人机交互模块,其被配置用于在本车辆与所述周围车辆发生碰撞的概率高于预设概率阈值的情况下向本车辆的驾驶员发送相应的通知信息。
22、根据本发明的第三方面,提供了一种车辆,所述车辆包括根据本发明的系统。
23、根据本发明的第四方面,提供了一种计算机程序产品、例如计算机可读的程序载体,包含或存储有计算机程序指令,所述计算机程序指令被处理器执行时至少辅助地实现根据本发明所述的方法的步骤。
技术特征:
1.一种用于控制车辆驶过交叉路口的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述运动特征信息包括所述周围车辆(21,22)的当前位置信息、行驶速度方向、行驶速度值、和/或行驶速度变化值。
3.根据以上权利要求中任一项所述的方法,其中,至少基于所述周围车辆的经融合的运动特征信息控制本车辆(1)的行驶速度和行驶方向,使得本车辆(1)处于所述周围车辆(21,22)的驾驶员的视野范围内。
4.根据以上权利要求中任一项所述的方法,其中,所述方法还包括:
5.根据以上权利要求中任一项所述的方法,其中,在控制本车辆(1)行驶通过所述交叉路口的过程中提高本车辆(1)的行驶速度,使得本车辆(1)处于在本车辆(1)后方行驶或与本车辆(1)并排行驶的第一周围车辆(21)的驾驶员的前向视野的可视范围内;和/或
6.根据以上权利要求中任一项所述的方法,其中,所述方法还包括:
7.一种用于控制车辆驶过交叉路口的系统(10),其中,所述系统(10)包括以下构件:
8.根据权利要求7所述的系统(10),其中,所述系统(10)还包括以下构件:
9.一种车辆,所述车辆包括根据权利要求7或8所述的系统(10)。
10.一种计算机程序产品、例如计算机可读的程序载体,包含或存储有计算机程序指令,所述计算机程序指令被处理器执行时至少辅助地实现根据权利要求1至6中任一项所述的方法的步骤。
技术总结
本发明涉及一种用于控制车辆驶过交叉路口的方法,其包括:在本车辆行驶靠近交叉路口的情况下,通过本车辆探测到的周围行车环境信息判断本车辆行驶通过交叉路口后要驶入的行车道是否是弯道(S1);如果是弯道,则将从周围行车环境信息中获取的周围车辆的运动特征信息与通过车对车通信接收到的周围车辆的运动特征信息进行融合(S2);至少基于周围车辆的经融合的运动特征信息,控制本车辆行驶通过交叉路口(S3)。本发明还涉及一种用于控制车辆驶过交叉路口的系统,一种车辆和一种计算机程序产品。根据本发明,在本车辆行驶通过交叉路口的过程中控制本车辆提前进行转向和加减速,从而尽可能地避免在换向过程中与周围车辆发生碰撞事故。
技术研发人员:李和安
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!